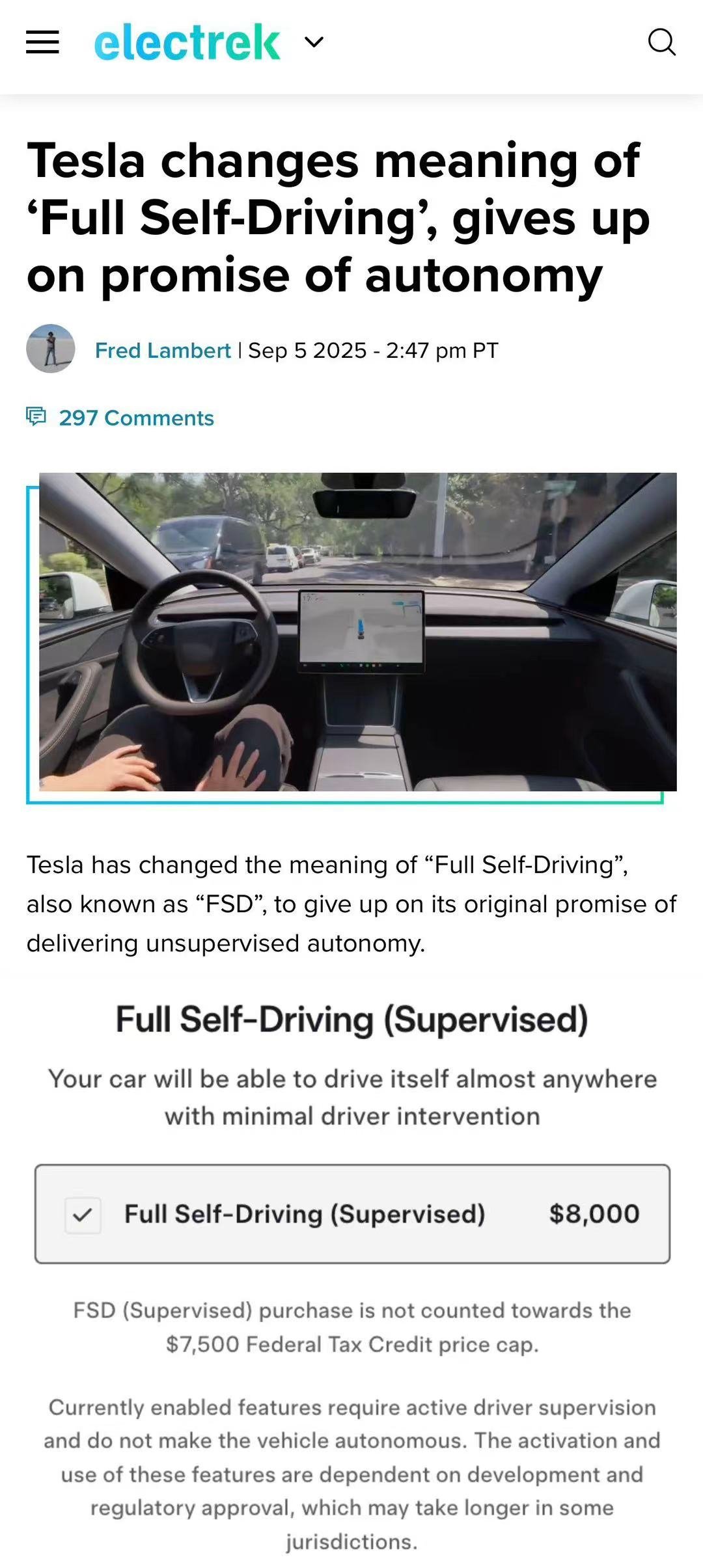
特斯拉调整智驾目标,不吹完全自动驾驶了,解释下技术问题
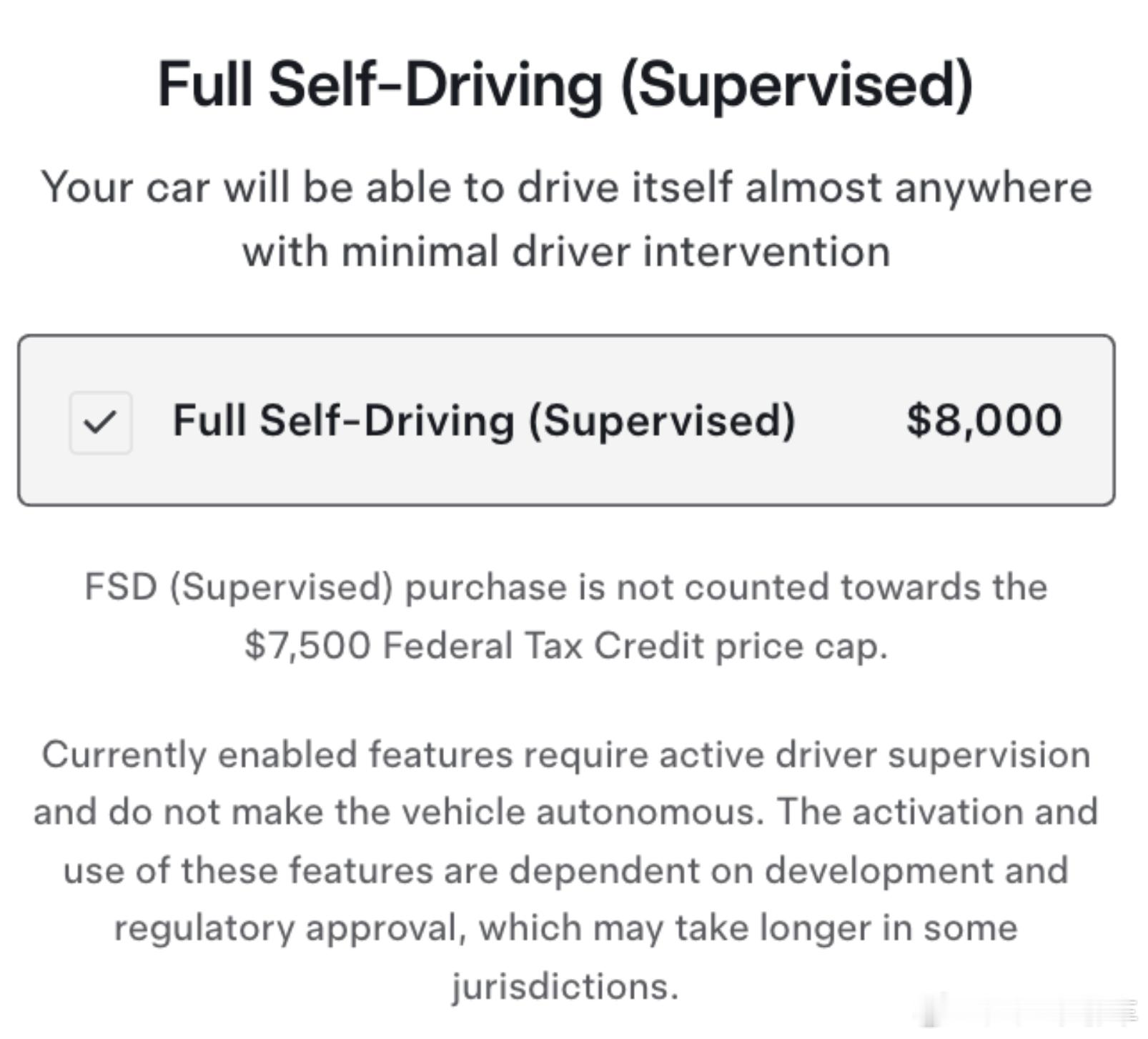
FSD改叫FSD(supervised),加了个受监控,就是要人在驾驶位上。
现在业界有些卡住了,自动驾驶主要是两个技术路线。一个是编代码堆硬件,猛加激光雷达、米波雷达,马斯克说加了反而坏事。一个是视频训练搞“端到端”,人编码很短,主要是自动训练学会本事,处理各种情况,特斯拉开始的。现在看来,这两条路都解决不了自动驾驶问题。
自动驾驶有很多corner case,不是普遍情况,训练数据少,但是碰到就要命,或者显得很傻影响形象。这些想靠端到端训练解决不太可能,还是得加代码。这个叫长尾场景,说不好有多少场景,低频事件说不定抓数据就要几百年。典型就是施工路段,自动驾驶一堆破事。
另外一个原因,开车是需要快速实时决策的,需要神经网络立刻就给出办法。如果是大模型那样慢吞吞算,早撞死了。但是能力强的自动驾驶又需要规模很大的神经网络。暂时的办法上先进的自动驾驶算力芯片,看着能压缩到50ms给出决策,但是实际跑还有问题,说不定要命的时候延迟就来了,神经网络没那么稳定。
再一个问题,神经网络黑盒子不好调试。撞出事了,不是改几行代码的事,不是飞机安全那样能吸取教训指数改善。说到底,靠明显有毛病的黑盒子神经网络,掌握人们开车的生死问题,这事马斯克也觉得不行了,第一性原理决定不可行。





评论列表