华为关于未来十年AGI发展的文稿,并按照要求整理成结构化的文本。
【未来十年AGI奇点突破的核心挑战】
一、 引言:AI的进化轨迹与当前挑战
1. 未来十年的核心命题
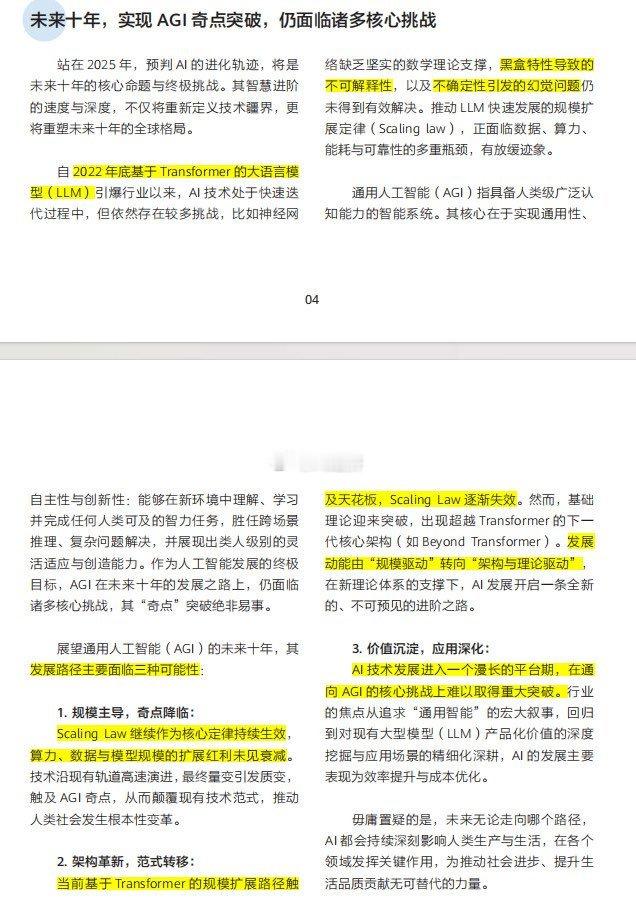
站在【2025年】,预判AI的进化轨迹,是未来十年的核心命题与终极挑战。
AI智慧进阶的速度与深度,将重新定义技术疆界,并重塑全球格局。
2. 当前AI技术面临的挑战
自【2022年底】基于Transformer的大语言模型(LLM)引爆行业以来,技术处于快速迭代中。
神经网络缺乏坚实的数学理论支撑。
黑盒特性导致不可解释性。
不确定性引发的幻觉问题仍未得到有效解决。
推动LLM发展的规模扩展定律(Scaling law)正面临数据、算力、能耗与可靠性的多重瓶颈,有放缓迹象。
【通用人工智能(AGI)的定义与未来发展路径】
一、 AGI的核心特质
定义:AGI指具备人类级广泛认知能力的智能系统。
核心能力:
通用性:能够在新环境中理解、学习并完成任何人类可及的智力任务。
自主性与创新性:胜任跨场景推理、复杂问题解决,并展现出类人级别的灵活适应与创造能力。
二、 未来十年发展的三种可能性
1. 路径一:规模主导,奇点降临
核心假设:Scaling Law持续生效,算力、数据与模型规模的扩展红利未见衰减。
发展路径:技术沿现有轨道高速演进,量变引发质变,触及AGI奇点。
最终影响:颠覆现有技术范式,推动人类社会发生根本性变革。
2. 路径二:架构革新,范式转移
核心假设:当前基于Transformer的规模扩展路径触及天花板,Scaling Law逐渐失效。
发展路径:基础理论迎来突破,出现超越Transformer的下一代核心架构(如Beyond Transformer)。
发展动能:由“规模驱动”转向“架构与理论驱动”,开启全新的进阶之路。
3. 路径三:价值沉淀,应用深化
核心假设:通向AGI的核心挑战难以取得重大突破,技术发展进入漫长的平台期。
发展路径:行业焦点从“通用智能”回归到对现有大型模型(LLM)产品化价值的深度挖掘与应用场景的精细化深耕。
主要表现:AI发展表现为效率提升与成本优化。
【超越概率统计框架的未来智能形态】
一、 当前大模型的局限性
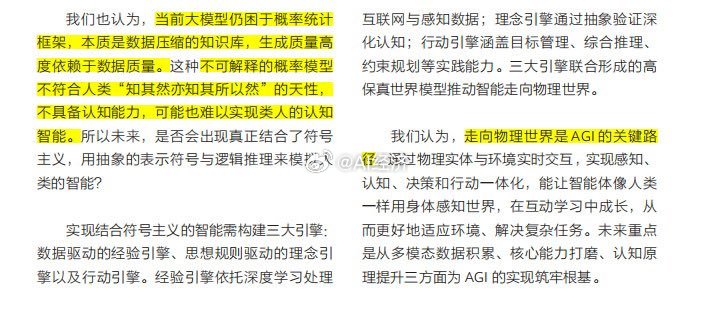
本质:困于概率统计框架,是数据压缩的知识库。
质量依赖:生成质量高度依赖于数据质量。
认知缺陷:不可解释的概率模型不符合人类“知其然亦知其所以然”的天性,不具备认知能力,难以实现类人的认知智能。
二、 结合符号主义的智能实现路径
1. 构建三大引擎
经验引擎:数据驱动,依托深度学习处理互联网与感知数据。
理念引擎:思想规则驱动,通过抽象验证深化认知。
行动引擎:涵盖目标管理、综合推理、约束规划等实践能力。
2. 形成高保真世界模型
三大引擎联合推动智能走向物理世界。
三、 走向物理世界:AGI的关键路径
核心理念:通过物理实体与环境实时交互,实现感知、认知、决策和行动一体化。
实现方式:让智能体像人类一样用身体感知世界,在互动学习中成长。
未来重点:
多模态数据积累。
核心能力打磨。
认知原理提升。
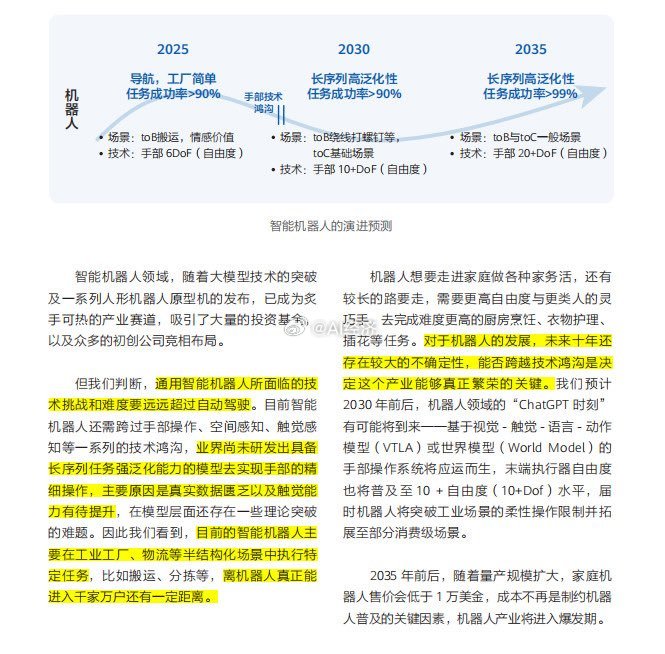
【智能机器人的演进预测与挑战】
一、 智能机器人演进预测(2025-2035)
【2025年】
任务成功率:导航,工厂简单任务成功率【>90%】。
应用场景:toB搬运,传感价值。
手部技术:手部【6DoF】(自由度)。
【2030年】
任务成功率:长序列高泛化性任务成功率【>90%】。
应用场景:toB绕线打螺钉等,toC基础场景。
手部技术:手部【10+DoF】(自由度)。
【2035年】
任务成功率:长序列高泛化性任务成功率【>99%】。
应用场景:toB与toC一般场景。
手部技术:手部【20+DoF】(自由度)。
二、 当前面临的技术鸿沟
技术挑战难度:通用智能机器人的技术挑战和难度远远超过自动驾驶。
关键技术鸿沟:需跨过手部操作、空间感知、触觉感知等一系列技术。
核心难题:
业界尚未研发出具备长序列任务强泛化能力的模型去实现手部的精细操作。
主要原因是真实数据匮乏以及触觉能力有待提升。
模型层面还存在一些理论突破的难题。
当前应用现状:主要在工业工厂、物流等半结构化场景中执行搬运、分拣等特定任务。
三、 未来关键突破点与产业爆发预测
家庭应用挑战:需要更高自由度与更类人的灵巧手,以完成厨房烹饪、衣物护理、插花等高难度任务。
机器人领域的“ChatGPT时刻”:预计在【2030年前后】到来。
技术突破:基于视觉-触觉-语言-动作模型(VTLA)或世界模型(World Model)的手部操作系统将应运而生。
硬件普及:末端执行器自由度将普及至【10+自由度】(10+DoF)水平。
场景拓展:机器人将突破工业场景的柔性操作限制,拓展至部分消费级场景。
产业爆发期:预计在【2035年前后】到来。
成本因素:随着量产规模扩大,家庭机器人售价会【低于1万美金】,成本不再是制约普及的关键因素。


![我就说AI代替不了人类吧[doge]](http://image.uczzd.cn/11168637053587929967.jpg?id=0)