继四个月前,日本ispace公司的白兔-R着陆器登月失败之后,该国第二个登月探测器“月球探测智能着陆器”也即将迎来发射之期。

白兔-R着陆器撞月效果图
原本按照计划,本周一,一枚H-2A火箭将在种子岛宇宙中心以拼车搭载的方式发射该探测器,但是发射当天出现了高空风力过大的问题,遂推迟发射,前一日也曾遭遇类似问题,这是第二次推迟,发射窗口将持续至9月15日,期间每一天都有发射窗口,但由于火箭发射准备工作耗时较长,下一次发射日期不会早于本周四。

推迟发射的H-2A火箭
“月球探测智能着陆器”不同于已经登月失败的“白兔-R着陆器”,后者是商业航天公司整合国际力量研发,前者则是立足其国内由日本宇宙航空研究开发机构JAXA抓总研制,更能体现日本登月实力。
受制于国力与预算规模,日本航天难以在火星探测、月球探测、载人航天等领域全线跟进,只能谋求差异化竞争优势,所以历来喜欢剑走偏锋,做法就是,通过集中力量攻关某一项其它航天强国尚没有去做的项目,例如以隼鸟二号为代表的小行星采样返回任务,“月球探测智能着陆器”也是如此。
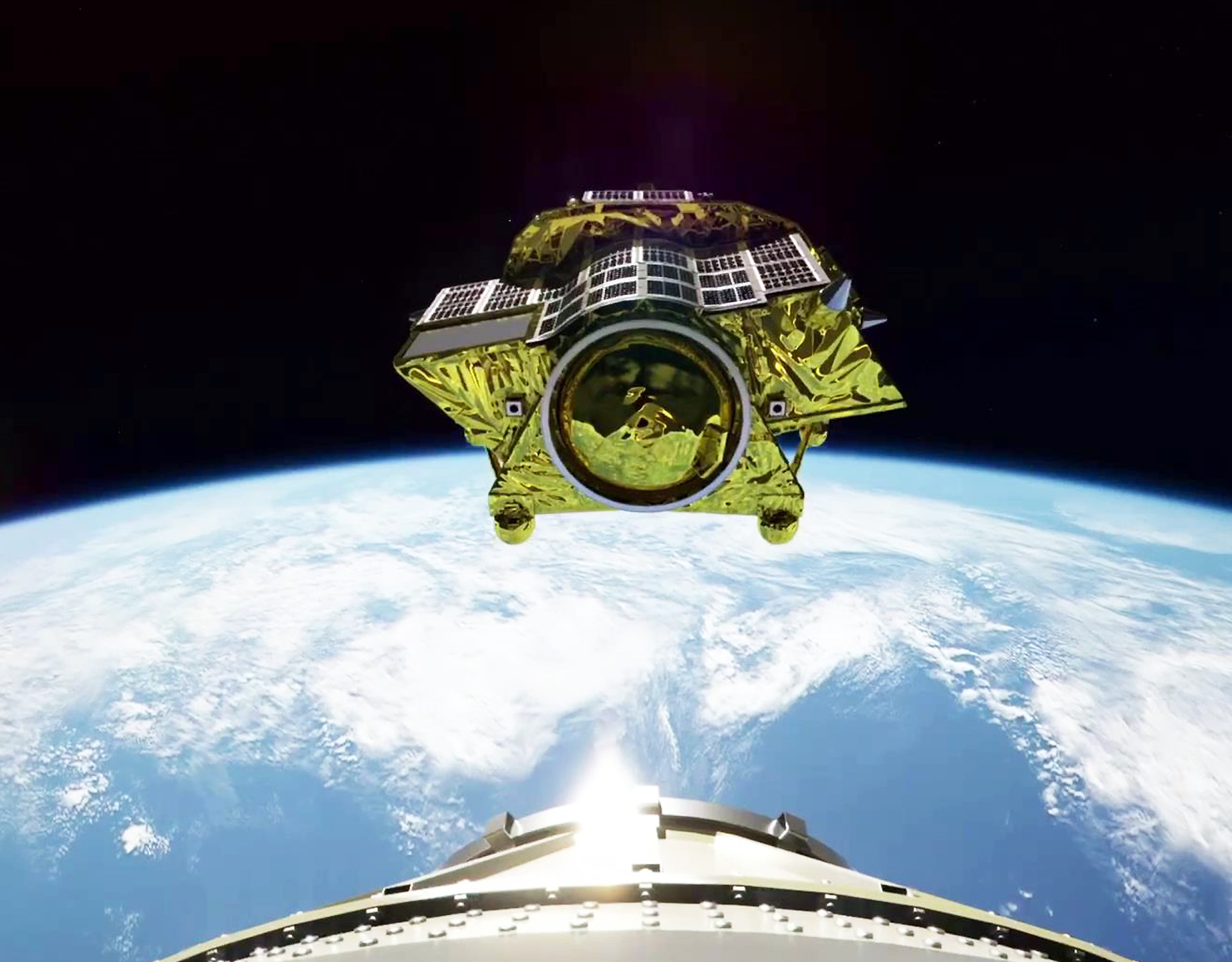
月球探测智能着陆器效果图
“月球探测智能着陆器”的竞争优势在于将攻克“月面定点着陆”技术,以往人类登月任务都是科学家根据工程到达能力选择某一大片区域着陆探测,即可满足科学需求,然而随着人类对月球认识的加深,科学家希望能够到达指定的具体点位进行探测,例如,去月球南极既有连续光照区(能源优势利于发电),又临近永久阴影区(水冰资源集中)的地方着陆,这些地方可供选择的着陆区通常都非常狭小,而且地形也更为复杂,客观上要求着陆探测器必须具备高可靠的“月面定点着陆”功能。
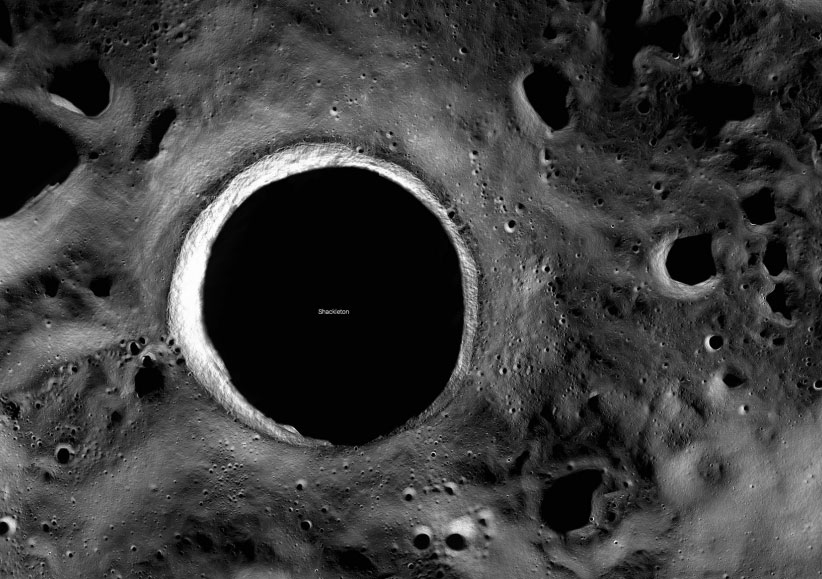
月球南极区域沙克尔顿陨石坑及其周边,有很多大大小小的永久阴影区与连续光照区。
上个世纪,人类无人着陆器仅具备基于大片开阔平坦区域的盲降登月能力,且失败率较高,进入21世纪以来,嫦娥三号基于光学成像粗避障+激光三维成像精避障的接力避障技术,率先终结了人类无人探测器盲降登月的历史,此后又取得了嫦娥四号、嫦娥五号登月任务的成功,三次登月三次成功,成功率高达100%。
嫦娥探月工程发展至今所取得的成就是巨大的,也引领了人类21世纪的探月高潮,但是也要认识到,目前嫦娥系列着陆器尚未拿下月面定点着陆技术能力。

嫦娥系列着陆器尚不具备定点着陆能力,图为嫦娥三号避障段画面。
日本航天寄希望于月球探测智能着陆器在全球范围内率先掌握月面定点着陆技术,从其登月时间上看可领先我国嫦娥七号至少两年时间,但却被印度航天截胡,实际情况果真如此吗?我们该如何应对?本文将就围绕这些问题进行全面解读。
月面定点着陆是指,着陆器在没有发射前,提前选定具体的登月坐标位置,着陆器发射后瞄准选定的登月坐标精确着陆,实际登月位置与选定的登月坐标位置之间的偏差需要控制在百米量级。
以嫦娥三号为代表的嫦娥系列着陆器,满足的是确保成功登月的高可靠高安全的月面着陆需求,比如嫦娥三号在精避障阶段基于障碍规避需求可以通过激光三维成像敏感器选择最安全的着陆点,着陆后的着陆点与激光三维成像敏感器选择的安全着陆点位置偏差是1米,精度不可谓不高,但是,要认识到这里的1米偏差量并不是实际着陆点与选址着陆点之间的偏差,其与选址着陆点之间的偏差是600多米,到了嫦娥五号任务阶段,这一偏差数值扩大到了2.33公里。

为什么实际着陆点与选址着陆点之间的偏差大?
航天器在太空中飞行,即便是很小的轨道偏差也往往是失之毫厘差之千里,而轨道偏差往往又是客观存在,难以绝对消除,在这个基础上执行登月任务时,还存在反推减速发动机的推力偏差,这就会进一步放大实际着陆点与选址着陆点之间的位置偏差。
在嫦娥探月工程已经实施的三次登月任务中,嫦娥四号的登月难度是最高的,它需要实现月球背面复杂崎岖地形的安全着陆,预选着陆区的地形起伏有6000多米,嫦娥三号预选着陆区的地形起伏仅有600多米,对测距敏感器的数据精度以及着陆器控制算法的可靠性要求更高,预选着陆区面积也只有嫦娥三号任务时期的5%,在一定程度上要求嫦娥四号需要具备定时定点的着陆能力,保障成功登月的难度很大。

嫦娥四号登陆月背需要克服万米高差
最终,嫦娥四号之所以能够成功登陆面积小很多的月背预选着陆区,主要归功于包括预测校正制导等新技术的应用,确保轨道偏差量最小化,并准确判读轨道数据,进而尽最大限度缩小实际着陆点与选址着陆点之间的位置偏差,此次登月任务的成功,标志着我国掌握了基于科学探测需求任意选择着陆区的全月面到达能力。
但是,即便做到了这一步,嫦娥四号仍旧没有掌握月面定点着陆能力,这项技术真的很难吗?
嫦娥四号原本是嫦娥三号探测器的备份,它原本有3个选择:1.在嫦娥三号任务成功后,不发射,集中精力准备当时即将开始的嫦娥五号月球采样返回任务;2.让嫦娥四号降落在嫦娥三号旁边;3.拓荒月背探测。

嫦娥三号着陆器
三个选项中,月球背面探测很吸引眼球,然而降落在嫦娥三号旁边这个选项也不遑多让,这说明嫦娥四号在选择任务目标时曾经考虑过拿下“月面定点着陆”这一工程能力,探月工程三期副总师李春来曾这样说道,我们落在嫦娥三号的边上,这也能显示出我们的水平,控制精度很高啊。
两个着陆探测器在月球表面“会师”,在人类登月探测历史中曾有过一次,也是迄今为止仅有的一次,就是上个世界的阿波罗12号任务,当时无畏号登月舱着陆在距离勘测者三号旁边仅163米的位置,在如此近距离的条件下,宇航员徒步来到了勘测者三号着陆点,他们对这个无人着陆器拍摄了大量照片,并拆下部分零件带回了地球。
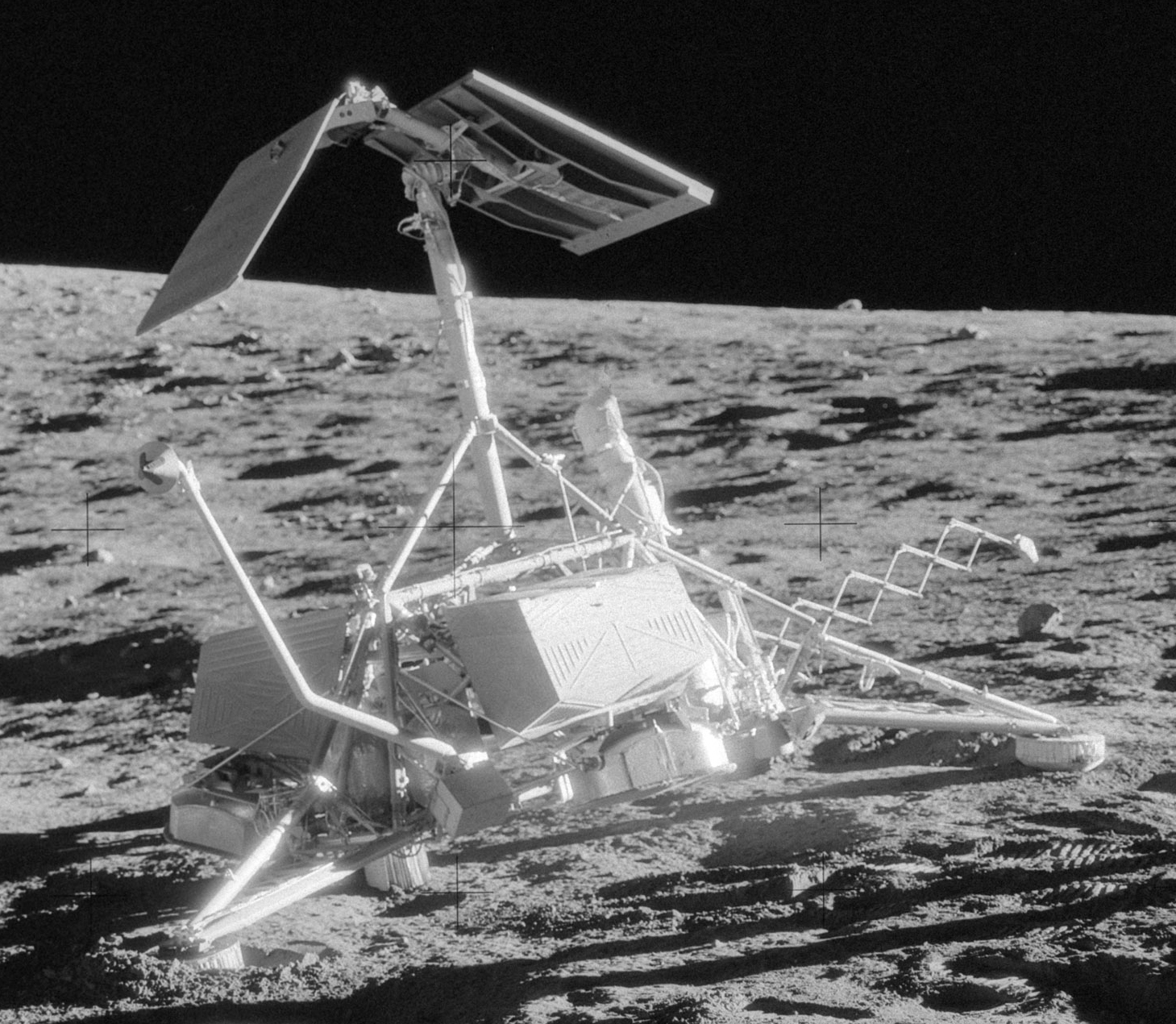
阿波罗12号宇航员拍摄的勘测者3号无人着陆器
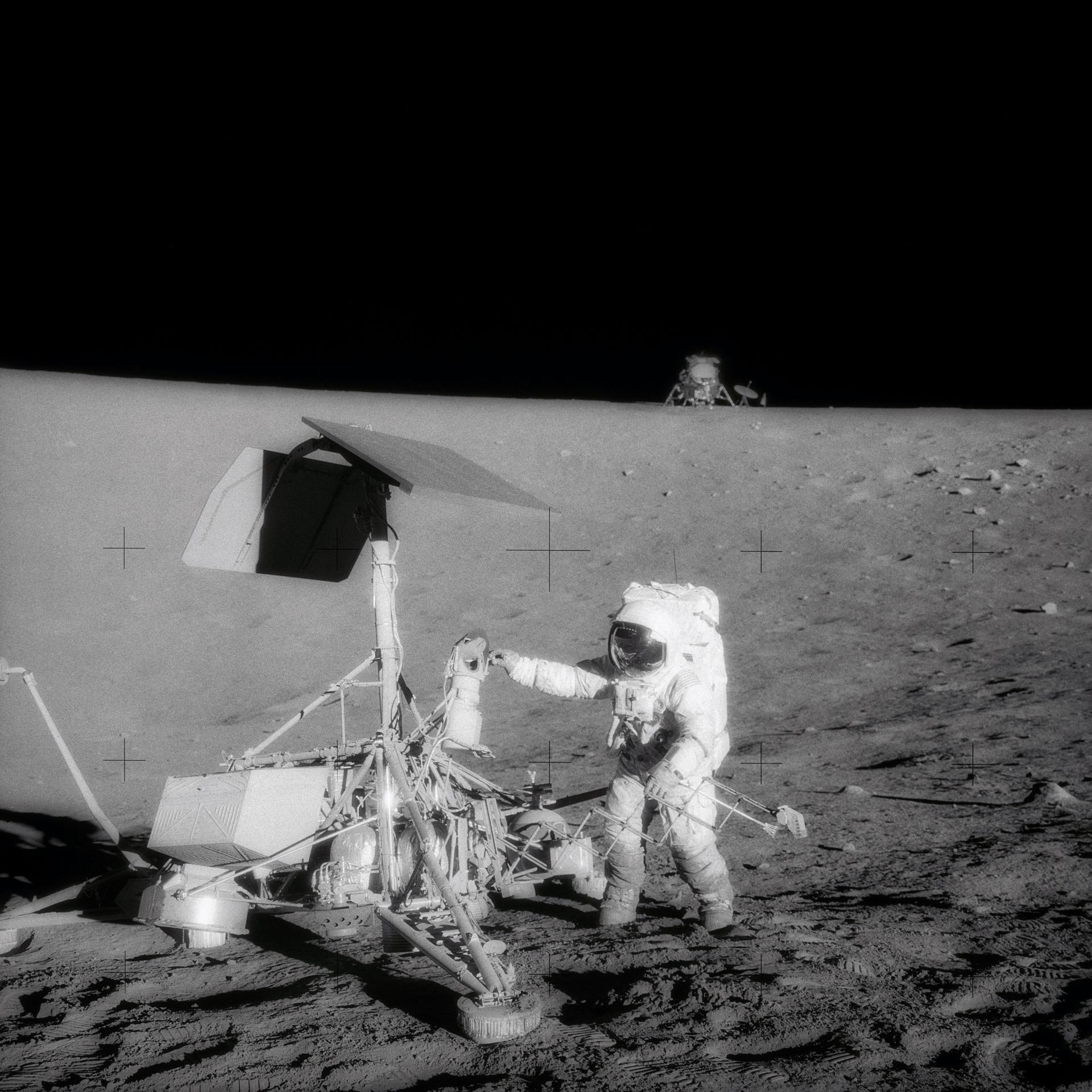
阿波罗12号宇航员与勘测者3号无人着陆器合影,远处是无畏号登月舱。
之所以选择降落在勘测者三号无人着陆器旁边,也是为了向世界展示他们的工程实力,再就是这个无人着陆器有一定的特殊性,它在着陆时由于测距敏感器误判导致在月面弹跳了两次,幸运的是后续工作正常。宇航员亲赴着陆现地,拍摄照片并拆下部分零件带回地球,有助于研究在非正常着陆情况下探测器的应急表现,以及零部件在月面工作的寿命表现。

NASA的LRO绕月卫星拍摄的阿波罗12号与勘测者3号登月遗址

阿波罗12号指令舱宇航员拍摄无畏号登月舱
在航天事业刚刚起步的年代,阿波罗12号飞船的无畏号登月舱是怎样实现月面定点着陆的?
正如前文所述,在嫦娥三号以前所有的无人月球着陆器都只具备没有障碍识别与障碍规避的盲降登月能力,定点着陆究竟是怎么做到的?
一个非常重要的原因,就是有了人的参与,阿波罗12号飞船的无畏号登月舱在登月过程中,大部分航程都依靠自动驾驶仪控制登月舱,宇航员只需对飞行轨道参数进行校对,当参数错误较大时可人为控制修正,而定点着陆也只需要在着陆末段进行必要的机动,此时宇航员可以基于月面陨石坑进行方位判别,勘测者三号无人着陆器就在一个名为“雪人”的大型陨石坑的中心位置,宇航员可以通过舷窗目视识别,之后手动控制飞船朝向目标机动,进而实现月面定点着陆。
在21世纪科技大发展的当下,人们往往容易忽视人的作用,但事实是,即便是当下,以人工智能为代表的自动化技术也无法完全取代人类,比如载人飞船空间交会对接,在自主交会对接基础上,通常都需要手控交会对接备份,因为自主交会对接敏感器存在误判概率,尤其是在阳照区。

航天员叶光富执行天舟二号与空间站手控遥操作对接任务
基于前文叙述可知,早在多年前,我们就拥有通过嫦娥四号任务拿下月面定点着陆技术的条件,但如果让嫦娥四号在嫦娥三号旁边降落,虽然具备较高的工程技术价值,但科学考察价值并非最优,因为嫦娥三号已经在那里,就当时的需求而言,月面定点着陆也并非急需,经过利弊权衡后,嫦娥四号最终选择了拓荒月背探测的任务目标。
通俗地说,月面定点着陆对于我们,并非能与不能的问题,而是选择何时去做的问题。
后来各国的登月实践表明,向月面定点着陆技术发起挑战的各国探测器有不少,但他们如果要想去月球背面探测却是难上加难,比如NASA也曾多次提出使用我国鹊桥号中继卫星进行月背探测的请求。
阿波罗12号飞船的无畏号登月舱约160米的着陆位置偏差是20世纪人类月面着陆位置精度的最佳成绩,而这也是那一时期人类的能力天花板。21世纪的当下,定点着陆需要将着陆位置偏差进一步控制在百米以内,比如日本即将发射的“月球探测智能着陆器”,那么,它又该如何实现这一工程目标呢?
月球探测智能着陆器的规格是,宽2.7米,长2.4米,厚1.7米,发射质量0.73吨。

月球探测智能着陆器(实物)
与之相比,嫦娥三号的发射质量是3.78吨,这一数据是日本月球探测智能着陆器的5倍有余。
月球探测智能着陆器的重量之所以很轻,主要还是因为预算问题,促使得该着陆器必须想办法降低重量,降低重量也意味着能够做的事情是很有限的,为了突出价值,只能专攻一项工程课题,就是月面定点软着陆。
采用低能量转移轨道是日本月球探测智能着陆器降低重量的主要手段,运载火箭可以先将探测器发射至近地点250公里、远地点1.9万公里绕地球运行的大椭圆轨道,探测器再自主变轨至一条远地点更高的弹道式轨道,当探测器接近月球时基于月球引力转向,继而被月球引力捕获,实现环绕月球飞行。

低能量地月转移轨道
低能量转移轨道之所以能够降低探测器发射质量,是因为该转移轨道可以实现燃料消耗最小化,自然就降低了发射重量,发射重量的降低对于压缩发射成本的效益也是立竿见影。
凡事有利就有弊,低能量转移轨道并不是适合所有任务,因为转移飞行耗时很长,一般都要半年左右时间,像载人登月这种时间敏感性任务并不适合低能量转移轨道。
当日本月球探测智能着陆器经过长途跋涉来到环月轨道后,就可以择机登月。
其登月起始点高度与嫦娥系列着陆器一样,都是15公里,选址着陆点在月球正面南半球酒海西北边缘的“西里勒斯” 陨石坑东部的“西奥利”陨石坑边缘,他们想要降落在陨石坑边缘的斜坡上,预选着陆区相当小,唯有定点着陆技术可以胜任。
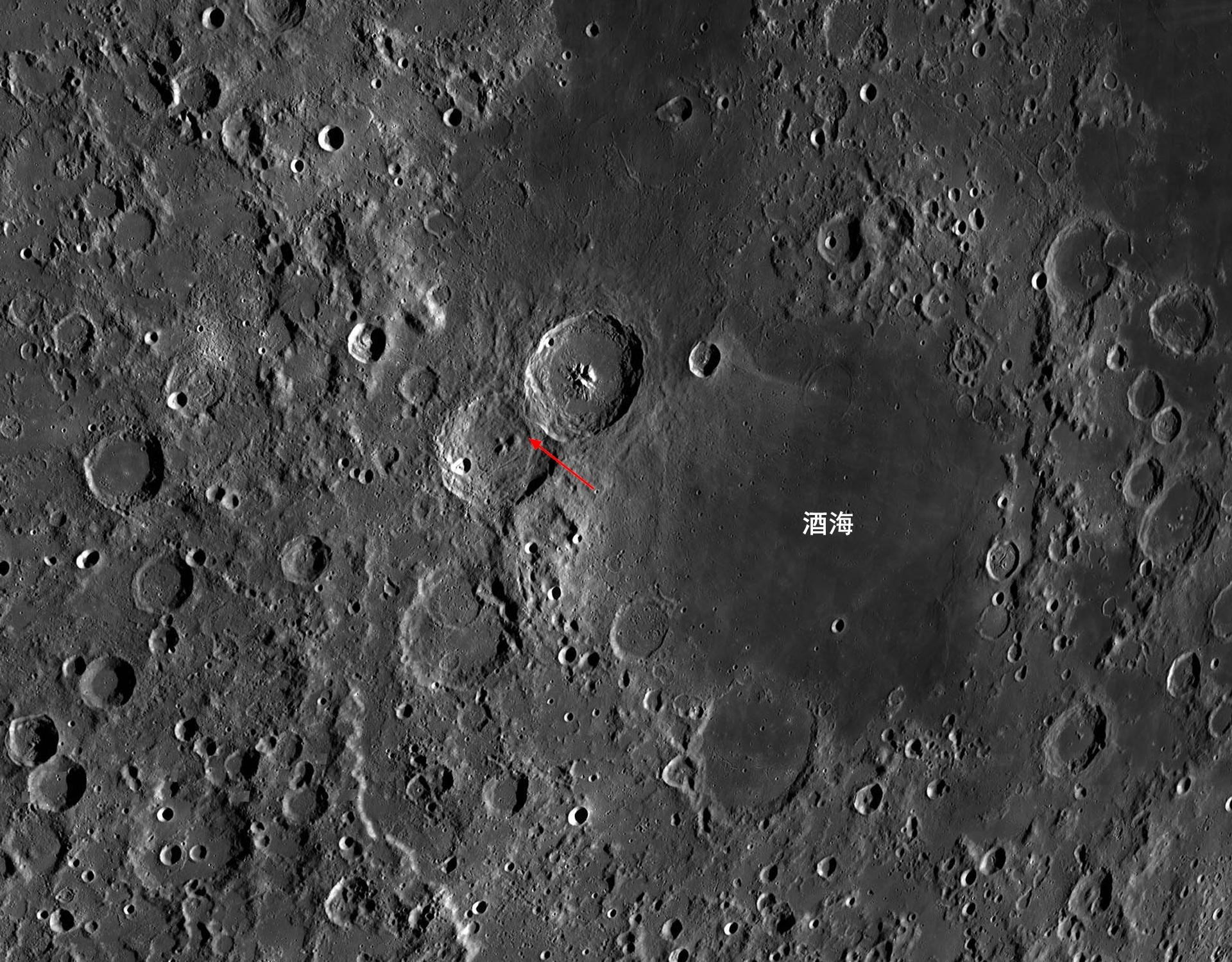
红色箭头所指之处就是日本月球探测智能着陆器的预选着陆区
实现月面定点着陆有两条技术路径,分别是,无线电信标导航与地形相对导航,无线电信标导航需要在着陆点提前放置无线电信标,适合多个月面探测器的集中部署,显而易见,日本月球探测智能着陆器没有这样的技术条件,那就只能基于地形相对导航技术进行月面定点着陆。
定点着陆的核心就是要准确掌握着陆器的空间位置,并基于空间位置信息进行弹道修正,进而实现定点着陆。

地形相对导航
着陆任务开始前,着陆器将使用光学设备对月面成像,然后将成像图像与机载预先储存图像进行陨石坑匹配,从而解算出自身准确的空间位置,此时,陨石坑的作用就相当于着陆器的路标。
基于准确的位置信息,着陆器就能通过陀螺仪、星敏感器、测距测速敏感器等传感器获取的姿态、方向、速度、距离等信息对标设计弹道进行精准的修正,进而到达目标着陆点。

定点着陆能够大幅缩小着陆点偏差,但并不能保证安全落月,因为当着陆器来到着陆点上空还要进行障碍识别与障碍机动规避,若没有此环节,即便着陆器以极高的精度瞄准着陆点也不能识别着陆点究竟是巨石还是深坑,这样一来着陆器就会倾覆,直接导致登月失败。
说到障碍识别与障碍机动规避,这就要应用与我国嫦娥系列着陆器应用的相类似的避障技术。
虽然目前嫦娥系列着陆器暂时没有定点着陆功能,但在前期任务中我们抓住了登月任务的主要技术矛盾--基于障碍识别的安全落月技术,这是事关登月成败的关键技术。
日本月球探测智能着陆器要在距离月面50米高度悬停,并对着陆区进行光学扫描成像,并快速识别障碍物,进而选定安全着陆点控制着陆器机动避障。

50米高度悬停成像
与日本着陆器不同,嫦娥系列着陆器的要求是在距离月面100米高度悬停成像,两者悬停高度为什么有差异?
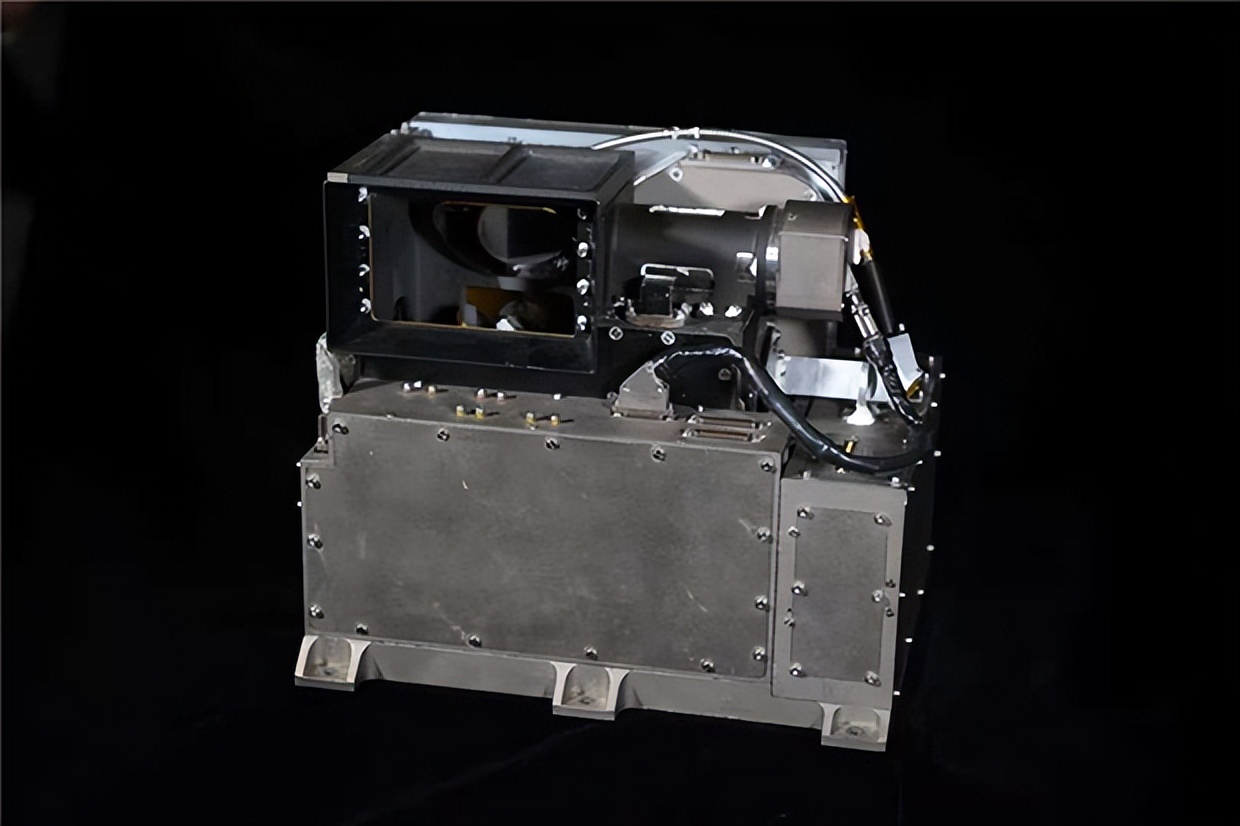
日本月球探测智能着陆器的下降反推动力是2台最大推力630N的主发动机,此型动力能在630N到330N推力区间变化,变推范围52%至100%,可以在较低高度进行悬停成像,与月面距离越近,成像分辨率越高,更容易看得清,从而降低光学避障相机指标要求。

日本630N变推力发动机
我国嫦娥系列着陆器配置的则是1台7500N变推力发动机,不仅推力更大,而且变推力范围也更大,能在16%至110%推力区间连续变化,同样也可以在50米高度悬停,但为什么我们要在100米高度悬停?

嫦娥系列着陆器配置的7500N变推力发动机
50米高度悬停,距离月面近,固然可以获取较高分辨率的月面图像,但是相机成像范围受限,无法在较大范围内选取安全着陆点,留给着陆器机动的空间、时间也有更大的限制,不利于安全落月。
嫦娥系列着陆器虽然悬停高度略高,但我们有高精度的激光三维成像敏感器,不仅解决了成像分辨率问题,也可以在较大范围内选取安全着陆点,机动范围、机动时间也都更宽裕。
日本月球探测智能着陆器具备挑战月面定点着陆的功能,但在安全落月领域仍落后于嫦娥系列着陆器,前者仅具备50米高度光学成像障碍识别功能,嫦娥系列着陆器则是更加可靠的光学成像粗避障+激光三维成像精避障的接力避障,正因为有如此稳妥的登月控制技术,这才有三次登月三战三捷的骄人战绩。

嫦娥四号悬停避障
在接触月面之前,日本探月智能着陆器还要分离两台小型移动载荷,一个可以在月面跳跃移动,另一个是微型球形移动巡视器,设计寿命都很短,主要是试验性质。
日本探月智能着陆器的着陆姿态也很独特,当着陆器距月面3米高度时,发动机关闭,姿控发动机随即启动,促使着陆器以侧倾姿态触月,靠近尾部的两个着陆腿先接触月球表面,然后前腿触月,最终以侧倾姿态着陆月面。
之所以如此设计,还是为了减重,它无法使用传统着陆腿登月,因为重量不允许,预选着陆区月面平均斜度是15°,这与以前不久撞击月球的月球25号探测器能够适应的月面斜度相同,后者的发射质量达到了1.75吨,比日本月球探测智能着陆器重了1倍多,若使用传统着陆腿,就不能以火箭拼车的方式发射,发射成本将大幅增加。

日本月球探测智能着陆器的侧摔式落月
日本月球探测智能着陆器的着陆缓冲支撑装置设计在着陆器的侧面,这是一种基于3D打印技术制备的球形海绵结构缓冲装置,着陆时通过海绵结构的碎裂进行着陆缓冲。

负责登月项目的子系统负责人Kushiki Kenji是这样描绘登月任务,他说,就是从减速开始到登陆月球表面预计将是令人屏息、麻木的恐怖20分钟!
如此表述足见该任务团队对登月任务的艰难性有清醒认知,他们也提前为此次登月任务的成败给出了定义:
1.安全登月,但没有实现100米定点着陆目标,这是最小成功,但验证了地形相对导航技术,为将来的定点着陆任务打下坚实基础;
2.安全登月,并实现100米定点着陆,完全掌握基于地形相对导航技术的月面定点着陆工程能力,这是完全成功;
3.在定点着陆基础上,着陆器搭载的各科学探测载荷工作正常,满足设计寿命要求(一个月昼,14个地球日。),这是在完全成功情况下,收获额外成功。

侧摔式落月分解动作
在日本航天人看来,拿下定点着陆,他们就能在登月工程技术领域处于领先位置,然而这件事,其实已经被印度月船三号截胡。
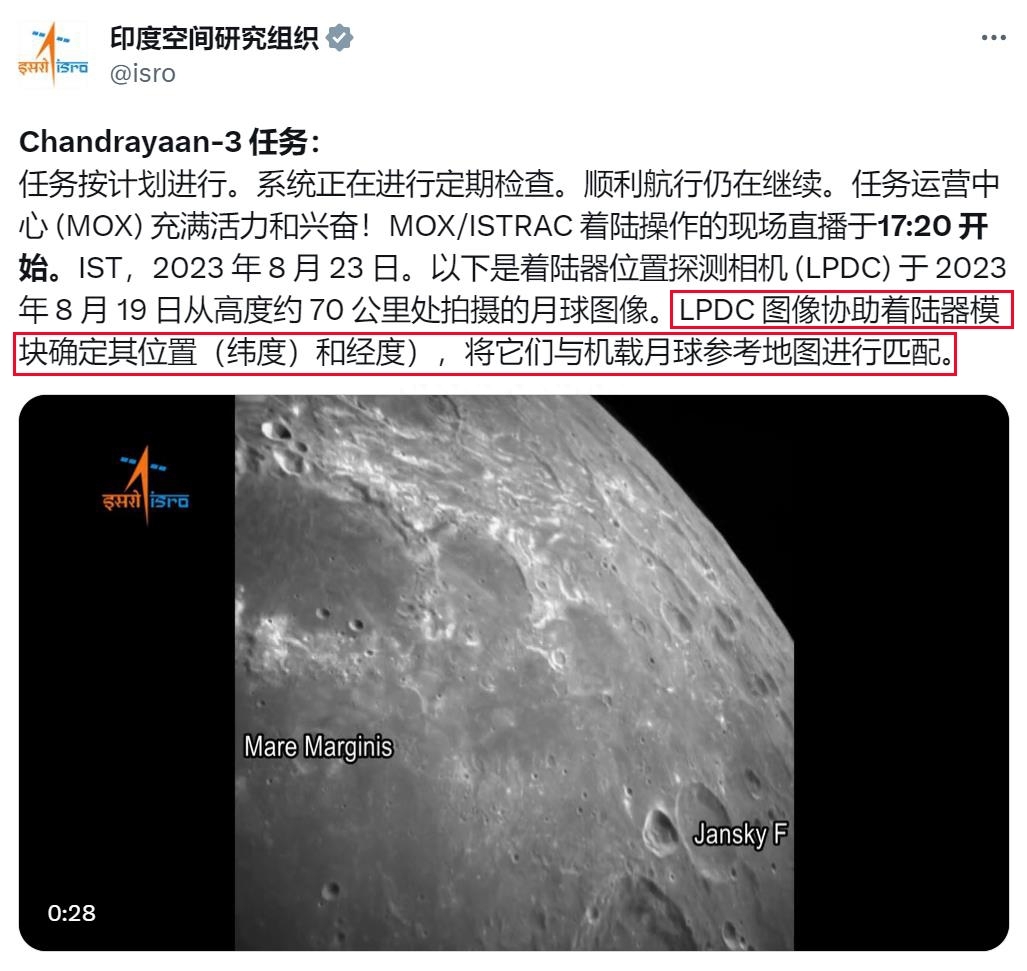
印度成功登月的月船三号着陆器配置有位置检测相机LPDC,在实施登月任务之前该相机就在离月面70公里高度对着陆航迹下方的月面成像,并将成像图像与机载预先储存的月面图像进行匹配,从而解算出自身准确的空间位置,这台相机还能为着陆器提供30公里高度下降过程中所需的经纬度信息,这就是典型的能够实现月面定点着陆的地形相对导航技术。
印度空间研究组织的空间应用中心负责人尼勒什·德赛说,月船三号着陆器的预选着陆区是一块4公里X 2.4公里的区域(约9.6平方公里),其实,四年前,月船二号的着陆区面积更小,仅0.25平方公里,在相同传感器配置条件下,月船三号着陆区面积选择虽然保守了一些,但其所表现出的着陆精度也已经足够高。
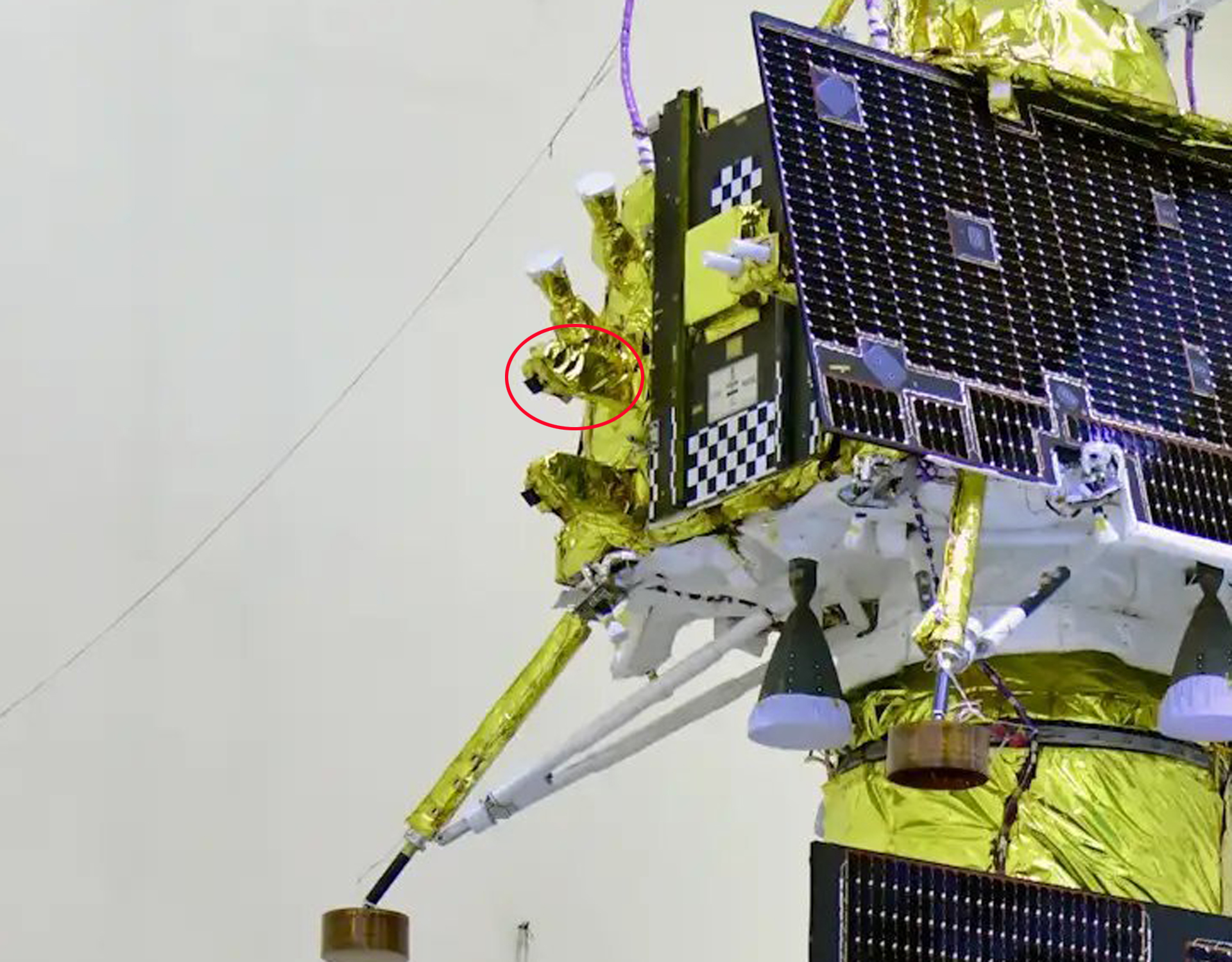
月船三号着陆器的位置检测相机LPDC
与之对比,登陆月背的嫦娥四号的预选着陆区是360公里X 90公里(约3.2万平方公里),相当于一个海南岛的面积。
两个着陆器的预选着陆区面积对比,这就是月面定点着陆技术有与没有的差异所在,此项技术于我们而言,正如前文所述,不是能与不能,而是选择何时去做的问题。
印度月船三号与日本月球探测智能着陆器虽然都具备月面定点着陆功能,但它们在月面仅能存活14天,探测规模非常有限,技术验证意味更浓。之所以不能扩大探测规模,与其掌握此项技术的自信不足有关,而自信与否源自实力的强弱。

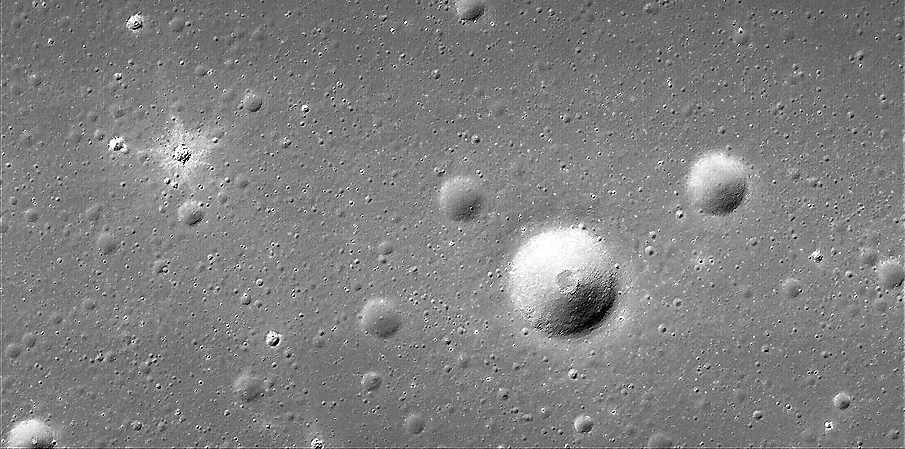
月船三号月球车导航相机拍摄的月表画面
反观我们,月面定点着陆功能的掌握将基于嫦娥七号任务开局,这个开局任务也相当宏大。
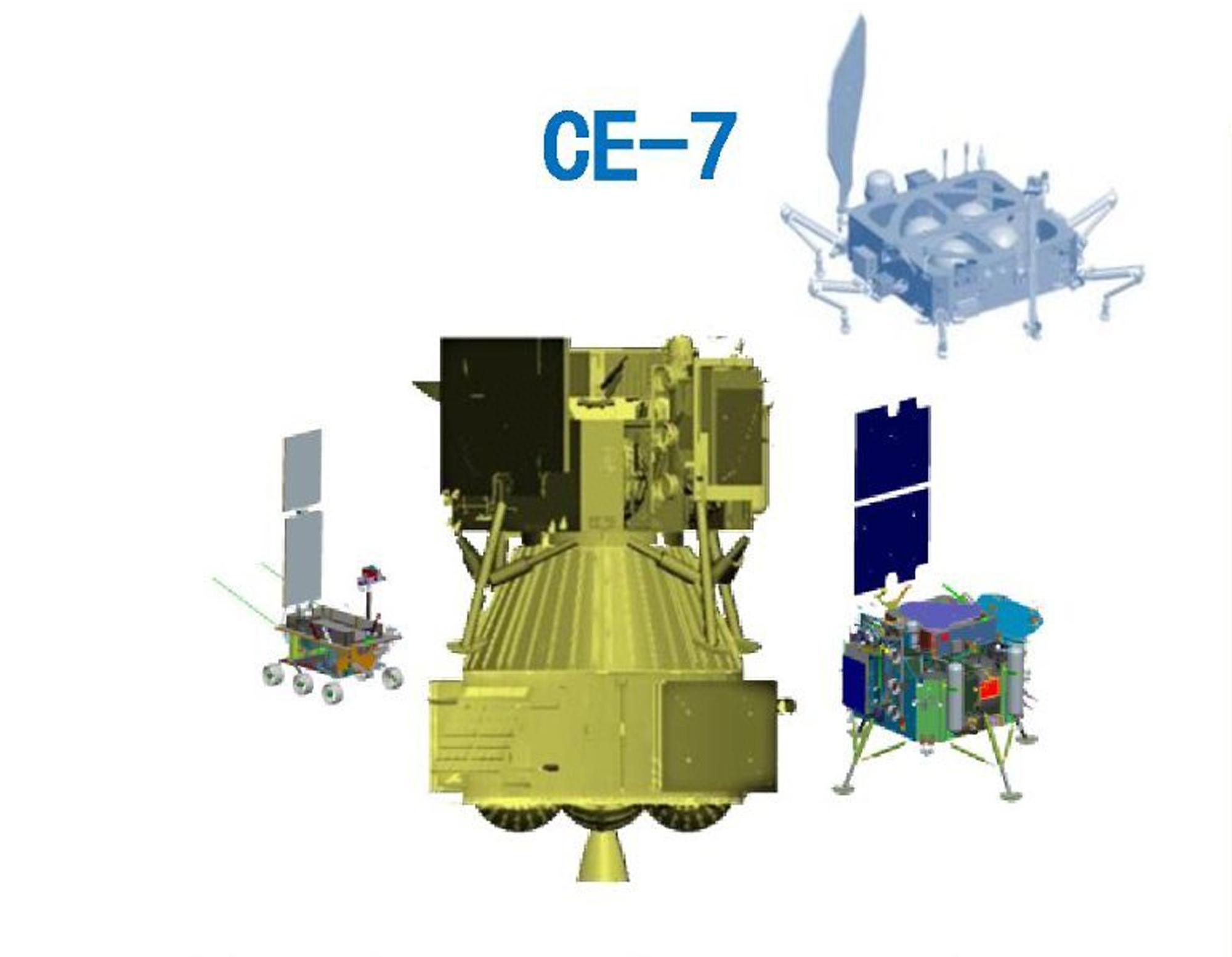
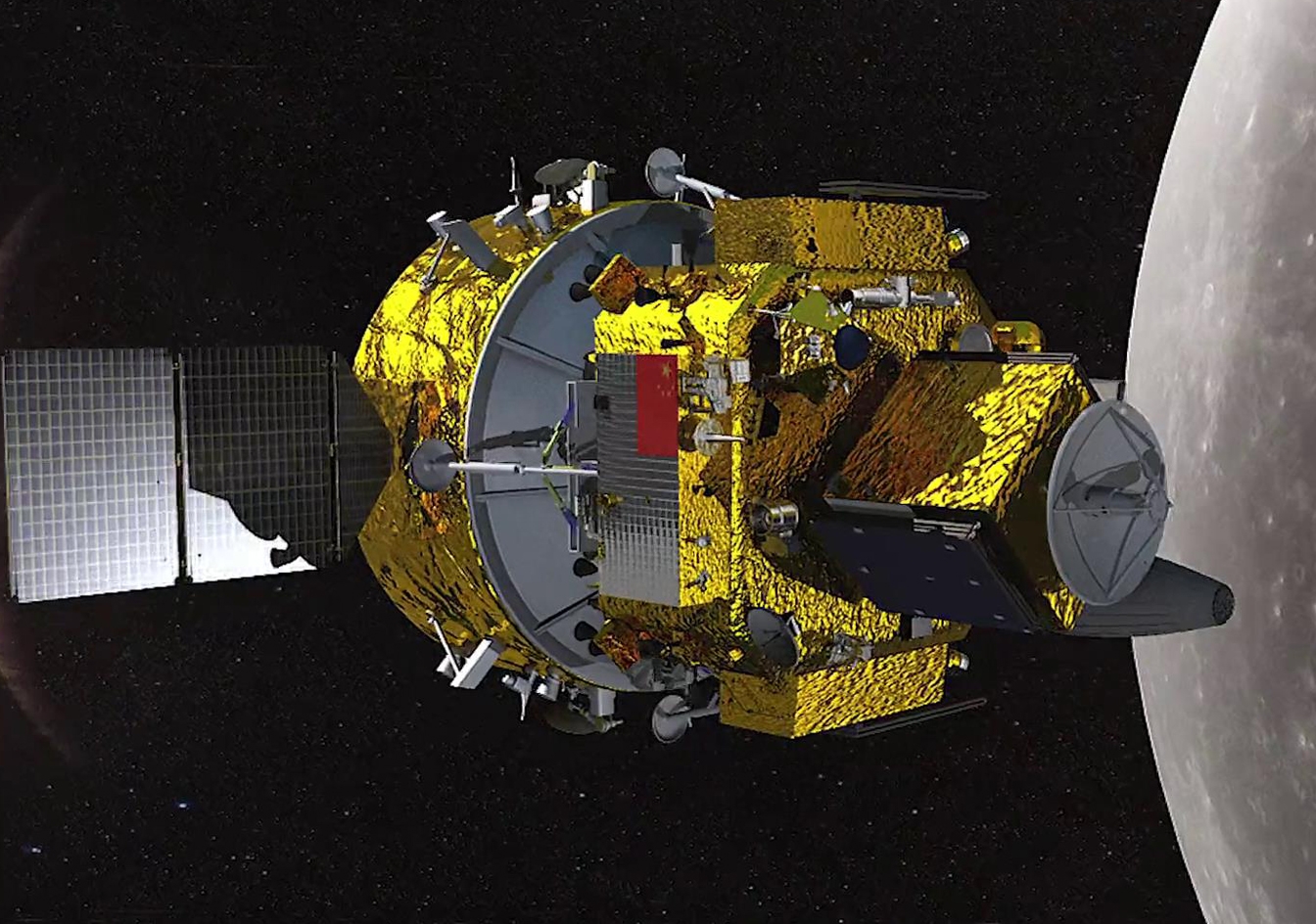
嫦娥七号探测器是旨在对月球南极,及月球全球进行大规模深度探测的多器组合的大规模月球探测器,由推进舱、着陆器、月球车、飞越探测器,以及其它月面部署载荷组成,规模之大可谓空前。
除推进舱及支撑机构外,其余组成部分将全部软着陆于月面,届时我们选择的登陆点不会像月船三号着陆器那样,连月球南极区域的边都没碰到,嫦娥七号要登陆的是86°S以南有极昼极夜现象的真正的月球南极区域,并将派飞越探测器飞入永久阴影区直接获取水冰资源存在与否的直接证据。
嫦娥七号
正如前文提及的,月球南极圈内,既有连续光照又有永久阴影区可供选择的着陆区面积极为狭小,这表明我们的定点着陆技术要求会更高,着陆位置更精确。
若不是对自身掌握的月面定点着陆技术实力高度自信,就不会将嫦娥七号这样规模如此庞大的探测器寄托在一项尚未验证的新登月技术上。
嫦娥七号也不具备实施基于无线电信标导航的月面定点着陆条件,因此,它也将基于地形相对导航技术实施月面定点着陆,此项任务需要两大能力支撑,首先是要有高分辨率的月面照片预先储存于机载计算机,还需要高效率的专用图像处理算法,以兼顾精度控制和处理时间。
以嫦娥系列着陆器登月末段的精确避障任务为例,激光三维成像敏感器只需0.25秒就能完成着陆区扫描,机载计算机也仅需1秒钟就能完成着陆区障碍识别,并选定安全着陆点,反观日本月球探测智能着陆器在进行图像处理时则需要5秒钟。
虽然二者的内容不尽相同,但窥一斑而知全豹,在机载计算机性能指标以及专用图像处理算法领域,我们确实有相当大的优势。
激光三维成像敏感器
要想定点着陆,还需要高分辨率的月面照片,我们有没有呢?
在众多的嫦娥系列探测器中,专职月球遥感探测的有两个,就是嫦娥一号与嫦娥二号,不同于国外专注月面高分辨率成像,嫦娥一号获取的是120米分辨率全月图,嫦娥二号则进一步提高了分辨率,获得了7米分辨率高精度全月立体影像图。
7米分辨率对比国外动辄0.5米、0.3米的高分辨率确实要低不少,但这恰恰反映出了我们工程战略决策的智慧。
别看只有7米分辨率,我们是月球全球覆盖的7米分辨率,截至目前这张全月图依旧是世界最高分辨率的全月图。
嫦娥二号降轨拍摄月球虹湾局部高分影像

像NASA的LRO月球勘测轨道飞行器、印度月船二号轨道器能够拍摄0.5米、0.3米高分辨率月面图像,但他们的成像效率很低,运行时间长达十四年的LRO月球勘测轨道飞行器至今也无法获得0.5米分辨率全月图,该探测器只能获取100米分辨率的全月图,远落后于嫦娥二号只用半年时间就获得的7米分辨率全月图。
嫦娥一号、嫦娥二号之所以没有聚焦高分辨率月面成像,而是专注提高覆盖月球全球的全月图分辨率,是基于有限工程资源条件下实现探测成果最大化的选择,也是自力更生的需求使然,有了全球最高分辨率的全月图,那么我们就可以不必有求于人。
但是,7米分辨率对于实现月面定点着陆的导航需求而言可能还有欠缺,咋办?
我们还有后招,嫦娥七号在进入绕月轨道后有绕月详查阶段任务安排,完成详查任务后再登月,此前天问一号探测器入轨火星后也有同类详查阶段任务安排。
在嫦娥七号详查任务阶段,就可以动用推进舱配置的高分辨率相机对预选着陆区进行高分辨率成像,这台相机的综合性能将居于世界领先水平。
嫦娥七号入轨月球后,将先期进行详查遥感探测任务。
嫦娥七号择优指标要求披露,该高分相机可获取100公里高度成像距离下优于0.5米分辨率全色影像图,这也仅是竞标指标,成功竞标的相机指标只会更优,高分辨率只是优势之一,更大的优势是其拥有大于18公里的成像幅宽,与之对比,NASA的LROC窄视场相机的高分辨率成像幅宽是5公里,是印度OHRC高分相机的成像幅宽是3公里。这意味着我们可以在相同时间内获得更多的高分辨率月面影像。
在可预见的将来,月球不再沉寂,会越来越热闹,月球就像是一个舞台,你方唱罢他登场,然而无论有再多的表演者,主角只一人。

没剩几个月就要到明年了,届时我们将再发射两个月球任务航天器,分别是鹊桥二号中继卫星与嫦娥六号,前者能同时为十个月球探测器进行中继通信,嫦娥六号将赴月球背面采样返回,这也是人类首次。
紧随其后的还有嫦娥七号、嫦娥八号、月面科研站,往后的每一个月球探测器都是国之重器,并行开展的还有载人登月工程,放眼世界,能做实现上述任务的国家有几个?用“屈指可数”来形容都显得不够准确,虽然看上去可能还有一个,但就实际情况而言,可能一个都没有。