为了进一步提高自动驾驶安全性,自动驾驶车辆应该具备预测附近交通参与者未来状态的能力,就像人类驾驶员能够提前预判旁边的车辆是否会加速或者变道一样。
近日,蘑菇车联提出轨迹预测模型lane transformer,能够精准、快速预测车辆等交通参与者的轨迹。测试结果显示,lane transformer提升预测性能的同时将计算速度提升大约10到24倍,目前仅需7毫秒,为所有开源算法中最快。
这一研究成果被国际权威学术期刊IEEE Open Journal of Intelligent Transportation Systems(IEEE 智能交通系统开放期刊)收录。该成果由蘑菇车联与复旦大学类脑人工智能科学与技术研究院薛向阳团队共同研发。
这是继ICRA、IROS之后,蘑菇车联研究成果再次受到国际权威学术机构认可。IEEE为国际性电子技术与信息科学工程师协会,在计算机、电信、电力及消费性电子产品等领域极具影响力。
预测附近车辆的未来轨迹是帮助自动驾驶系统确定最优路径规划方案和防止潜在碰撞的必要条件。因此,轨迹预测是自动驾驶的核心技术之一,准确的轨迹预测可以提升自车规划性能,保证行驶安全。
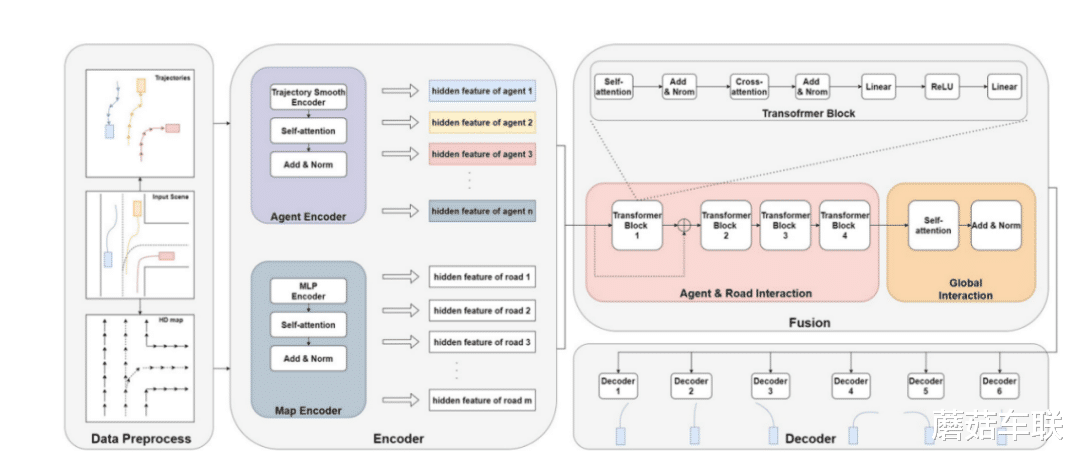
轨迹预测模型lane transformer具备精准、快速等优势,该模型具备良好的预测性能,且能够在很低的资源占用条件下实时进行预测。lane transformer通过替换常用的图卷积神经网络模块,使用注意力机制,大幅减低了计算复杂度。在实现精准预测的同时,lane transformer短至7ms的推理时间也创下行业纪录。
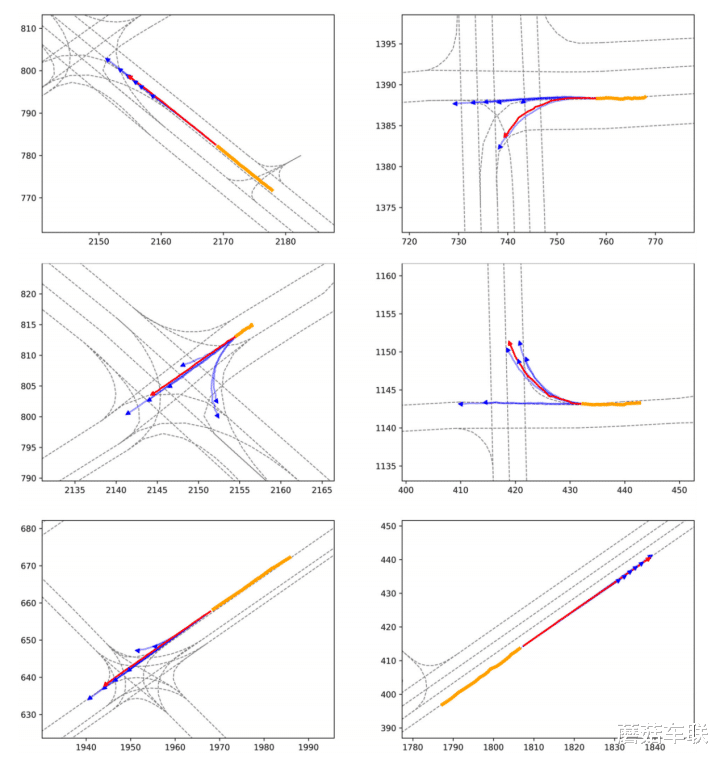
研究团队在Argoverse验证集上展示了lane transformer模型的定性结果。在上图中,研究团队为了清楚地显示场景,只将道路的中心线和目标的轨迹可视化。图像中,车辆已知的轨迹显示为橙色,蓝色线为lane transformer模型基于已知轨迹做出的6个预测,红色为车辆后续的真实行驶轨迹。结果证明,蓝色箭头涵盖了红色真实轨迹,这意味着lane transformer模型可以对未来的轨迹进行准确预测。此外,模型还给出了预测目标的多种可能性结果,例如,在十字路口,模型会给出直行或转弯的预测。
除了更快、更精准地预测轨迹,lane transformer模型还能够快速落地应用。研究团队严格坚持TensorRT的代码风格,lane transformer模型可以很容易地转换成TensorRT格式,这一格式有利于在自动驾驶车辆上的快速部署。

作为行业领先的自动驾驶全栈技术与运营服务提供商,蘑菇车联将持续在世界前沿技术领域实现突破。近半年内,蘑菇车联多项研究成果受到国际顶级学术机构认可,达到世界领先水平。公司将持续与清华大学、复旦大学、北京大学等高校研究团队进行产学研战略合作,共同研究探索自动驾驶解决方案的技术难点和商业化落地运营模式。在技术创新以及公司标准化产品的支持下,蘑菇车联的自动驾驶项目正加速在全国落地。