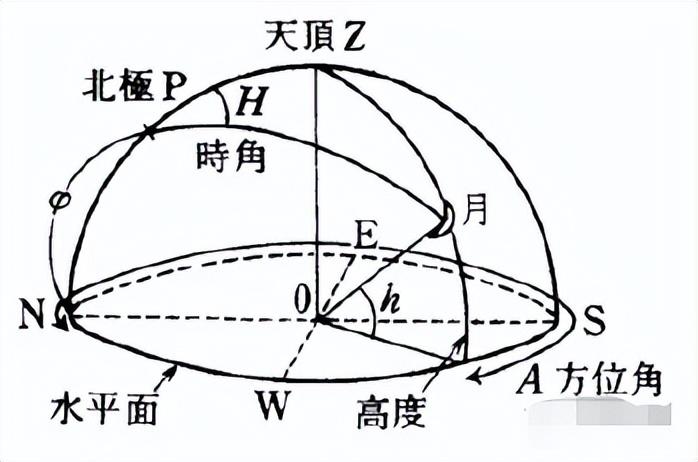
在测绘工作中,方位角是最基本的方位元素,也是导航定位和航空飞行等领域的重要元素。所谓方位角,是指从北开始的顺时针旋转角度,指示了目标相对于真北的方位。
具体来说,我们可以将方位角分为真方位角和磁方位角两种。真方位角以地球的真北方向为基准,而磁方位角则是以地球的磁北极方向为基准。在实际测量中,我们通常使用磁罗盘测量得到的磁方位角。
方位角的计算方法有多种,最常用的是迭代法和正算法。迭代法通过多次计算得到目标相对于真北的角度,而正算法则是直接计算出目标相对于真北的方向。下面我们就来介绍一下计算方法。
1. 根据坐标值计算方位角:
使用以下公式可以根据两个坐标值计算方位角:
其中,AA为起点到终点的方位角,\text{起点}起点和\text{终点}终点为相应坐标的数值。请注意,AA的值可能会受到所使用的坐标系的影响。
2.迭代法
迭代法是一种比较常用的计算方位角的方法,它的基本思想是将目标点的坐标和起点的坐标代入以下公式:
tan θ = (y2 - y1) / (x2 - x1)
其中,θ表示角度,y2和y1分别表示目标点和起点的纬度,x2和x1则表示目标点和起点的经度。通过多次迭代计算,即可得到目标点相对于起点的方位角。
3.正算法
正算法是一种直接计算目标点相对于真北方向的计算方法,它主要借助了三角函数的知识。假设目标点和起点的坐标均已知,我们可以使用以下公式进行计算:
cos A = sinφ2 - sinφ1 * cos(λ2 - λ1) / cosφ1 * sin(λ2 - λ1)
其中,A表示目标点相对于真北的方位角,φ1和φ2分别表示起点和目标点的纬度,λ1和λ2则表示起点和目标点的经度。
需要注意的是,在实际测量中,还需要考虑磁偏角和地球自转等因素的影响,这些影响会对方位角的计算产生一定的影响。因此,我们在计算方位角时需要特别谨慎。