为了加速推进江西省交通运输厅2024年度重大研发专项攻关项目《智能潜水自航式闸门关键技术研究及应用》落地实施,近日,在江西省信江船闸通航中心(简称“信江中心”)召开项目技术专题研讨会,项目负责人熊东亮主持会议,项目组相关研究人员参会。会议围绕技术难点突破、方案优化完善及阶段推进计划展开研讨与交流,并明确开展实体模型试验的关键时间节点,标志着项目从方案设计向实践验证迈出重要一步。
自项目成功入选省级重大研发专项以来,研究团队已完成国内船闸检修闸门的实地调研与数据采集,初步验证了智能潜水自航式闸门“多节组合+单节自航”的核心设计逻辑可行性,攻破关键技术瓶颈:闸门自航入槽、自航时浮游稳定及水动力学问题、流程智能控制系统研究等问题。此次会议以“靶向破题、提速推进”为核心目标,旨在通过集中研讨,进一步优化研发方案与明确时间节点,细化阶段推进计划。
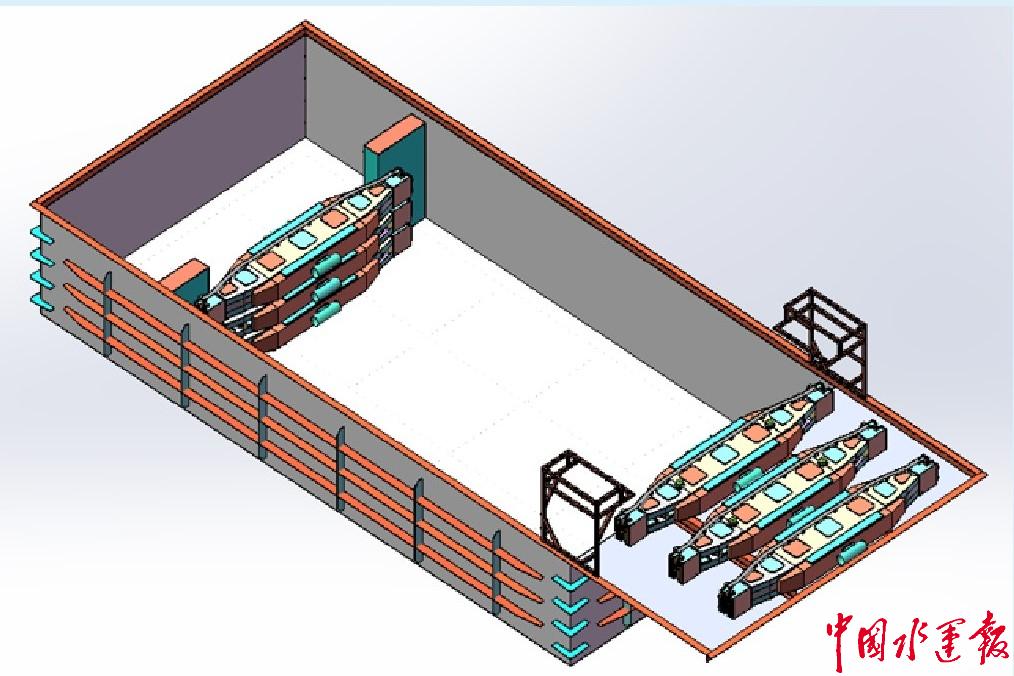
下一阶段核心任务为智能潜水自航闸门物理模型(简称“物模”)构建。通过仿真分析设计生产新型闸门,按照1:10的比例缩小实际船闸,模型尺寸为2.3米。目前已建物模实验场地长度8.4米,宽度6.3米,深度1米。预计于2025年年底在场内进行实体模型试验,以进一步验证其技术可行性和实际效果。
研究团队将以此次会议为契机,压实责任,全力推动智能潜水自航式闸门技术从方案走向实践,为船闸检修运维智能化升级提供坚实技术支撑。