文 | 伯朗特机器人
工业机器人在自动化作业上,焊接、喷涂、打磨、上下料、分拣……只要有合适的方案,各种应用可以玩出花来,这些都离不开机器人对坐标系的灵活运用,工业机器人坐标系的重要性体现在其为机器人提供精确的位置和姿态控制、简化编程与调试、适应复杂应用场景、保证一致性与精度等多个方面。
坐标系就像机器人作业的指南针,用于确认机器人的位置和姿态,或者用于在其他工件上建立基准。机器人有很多种坐标系,常见的坐标系主要包括基坐标系、DH 坐标系、关节坐标系、世界坐标、工作台坐标、工具坐标这6种。
1.基坐标系基坐标系是机器人安装基座的参考坐标系,通常以机器人安装面与第一转动轴的交点为原点。它是其他坐标系的基础,用于描述机器人整体的位置和姿态。基坐标系是固定坐标系,不会随机器人姿态变化而改变,基坐标系的原点一般位于机器人安装面与第一转动轴的交点处,X轴向前,Y轴向左,Z轴向上,且遵循右手定则。
基坐标系的作用主要在于:①为机器人提供了稳定的参考点,使得机器人能够准确地进行运动控制。即使在关节旋转和扭角变化的情况下,基坐标系也能确保机器人运动的精度和一致性。②在复杂的工业应用中,需要建立多个不同的坐标系以满足不同的生产需求。基坐标系作为这些坐标系的基准,使得机器人能够在不同的坐标系之间灵活切换,从而提高生产效率和加工精度。
 2.DH 坐标系
2.DH 坐标系全名为Denavit-Hartenberg坐标系,是一种用于描述机器人连杆之间几何关系的数学模型,广泛应用于机器人运动学建模、轨迹规划和运动控制等领域。
DH坐标系通过四个参数(连杆长度 aa、连杆偏移角 αα、转角 θθ 和链接夹角 ββ)来描述机器人相邻两连杆之间的空间关系。这些参数定义了从一个坐标系到另一个坐标系的变换关系,通常包括旋转和平移操作。这种方法是在每个连杆上建立一个坐标系,通过齐次坐标变换来实现两个连杆上坐标的变换,在多连杆串联的系统中,多次使用齐次坐标变换,就可以建立首末坐标系的关系,每个轴运动时总是绕着该个轴坐标系的 Z 轴进行旋转。
D-H 参数法通过在每个连杆上建立一个坐标系,利用齐次变换矩阵(4x4矩阵)来描述相邻坐标系之间的变换关系。在多连杆系统中,通过多次应用这些变换矩阵,可以建立首末坐标系之间的关系,从而描述整个系统的运动学模型。
D-H 参数法就是:
给每个连杆贴标签(建立坐标系)。
描述相邻连杆之间的关系(用四个参数)。
从第一个连杆到最后一个连杆,算出最终的位置和方向。
 3.关节坐标系
3.关节坐标系关节坐标系是基于机器人各关节轴线的参考坐标系,用于描述机器人各关节的运动状态。每个关节都有一个对应的坐标系,用于记录关节的转动量和方向。关节坐标系的原点通常设置在关节中心点处,反映了每个关节相对于其原点位置的绝对角度。
通过控制关节坐标系中的角度,可以实现机器人各轴的独立运动,比如,我们可以控制机器人的一轴从点a移动到点b,二轴从点c移动到点d,每个轴都可以被独立记录,最后完成复杂的动作组合。
补充一点,关节坐标系的原点和电机编码器的数值有关系,系统会记录一个状态的编码器数值作为原点,在这个状态下关节坐标的数值都是 0。机器人采用的是绝对值编码器的电机,断电状态下有电池给编码器供电,重新开电后系统会读取记忆中的电机绝对编码器数值,保证原点不丢失。
 4.世界坐标系
4.世界坐标系世界坐标系方向和机器人基坐标坐标方向一致,意味着世界坐标系和机器人基坐标系的 X、Y、Z 轴方向是相同的。坐标系 XYZ 的数据是各个轴的连杆参数相加而来,用来表示机器人处于空间内的哪一个点,确定机器人在空间中的位置。
X 轴:X1eec + L34b + L56Y
轴:Y1eec
Z 轴:Z + L23 + L34a
UVW 三项数据用欧拉角表示,旋转方向为 Rx、Ry、Rz。
Rx:绕 X 轴的旋转角度。Ry:绕 Y 轴的旋转角度。Rz:绕 Z 轴的旋转角度。
 5.工作台坐标系
5.工作台坐标系针对某个工作平台,人为设定的世界坐标系。当机器人的工作平面与基坐标系不平行时,为了方便调试,以工作台的两条边为基准轴建立工作台坐标系。
为什么需要工作台坐标系?
①方便调试:当机器人的工作平面与基坐标系不平行时,直接使用基坐标系会复杂化调试过程。
②简化操作:工作台坐标系将机器人的基准点从基坐标系移动到工作台坐标系原点,使操作更直观。
建立后,机器人的基准点从基坐标系→工作台坐标系原点,坐标系方向与基坐标一致。设定方法:选择工作台的一个角,依次记录Po、Px、Py三个点并确认修改。工作台坐标系方向参考基坐标,确保Z轴方向一致,机器人运动到Po后切换到工作台坐标系,XYZ数值为0。
Po:工作台坐标系的原点。
Px:X轴方向的点。
Py:Y轴方向的点。
确认修改:点击确定修改,建立工作台坐标系。
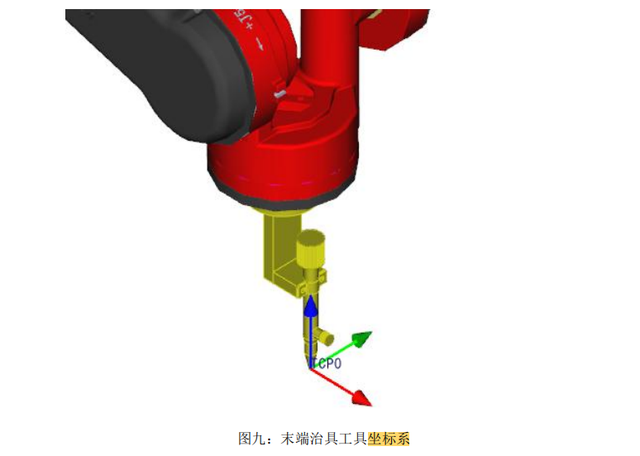
 6.工具坐标系
6.工具坐标系工业机器人的工具坐标系是描述机器人末端执行器(如吸盘、夹爪、焊枪等)位置和姿态的坐标系统。其核心作用是通过定义工具中心点(TCP)的位置和方向,它以工具中心点为原点,通过X、Y、Z轴的方向和角度来描述工具的姿态。适用于需要频繁调整工具姿态的场景中。
TCP通常位于工具的尖端或末端法兰中心处,二者可以通过标定进行切换。
通常情况下,末端 TCP 的姿态变换基准在机器人的法兰中心点位置,U 轴绕着 X 轴进行旋转,V 轴绕着 Y轴进行旋转,W 轴绕着 Z 轴进行旋转。

当末端安装了治具工装时,需要将工具的基准从法兰坐标系变换到治末端,一般采用 6 点法进行标定计算,切换为标定后的工具坐标系时,机器人的姿态计算基准点不再是法兰坐标系,而是标定后位置。
6点法标定
步骤:选择一个固定的参考点。通过治具末端以不同的姿态接触参考点,记录6组数据。根据记录的数据,计算出治具末端的基准点相对于法兰坐标系的位置和方向。
结果:标定后,工具坐标系的基准点不再是法兰坐标系,而是治具末端的位置。

机器人的坐标系应用是确定机器人的姿态和位置的重点,这些坐标系在不同的应用场景中发挥着重要作用,帮助实现精确的运动控制和任务执行。你最常的用的是那种坐标系?