关注T7的都知道,这一代Multivan是基于MQB平台打造的,不像T6是基于商用车框架扩建的。为妥协,T7从根本上就取消了机械四驱的可能。但喜欢下雪去度假的老钱们可不乐意了,没有了四驱,如何在Alpen中彰显自己?
所以今年大众就连同加州车型,终于给T7带来了4motion车型。这也是P4电驱桥首次在大众量产车上的应用,这里就来介绍下这个来自多次推迟的电四驱车型。
「硬件构架」
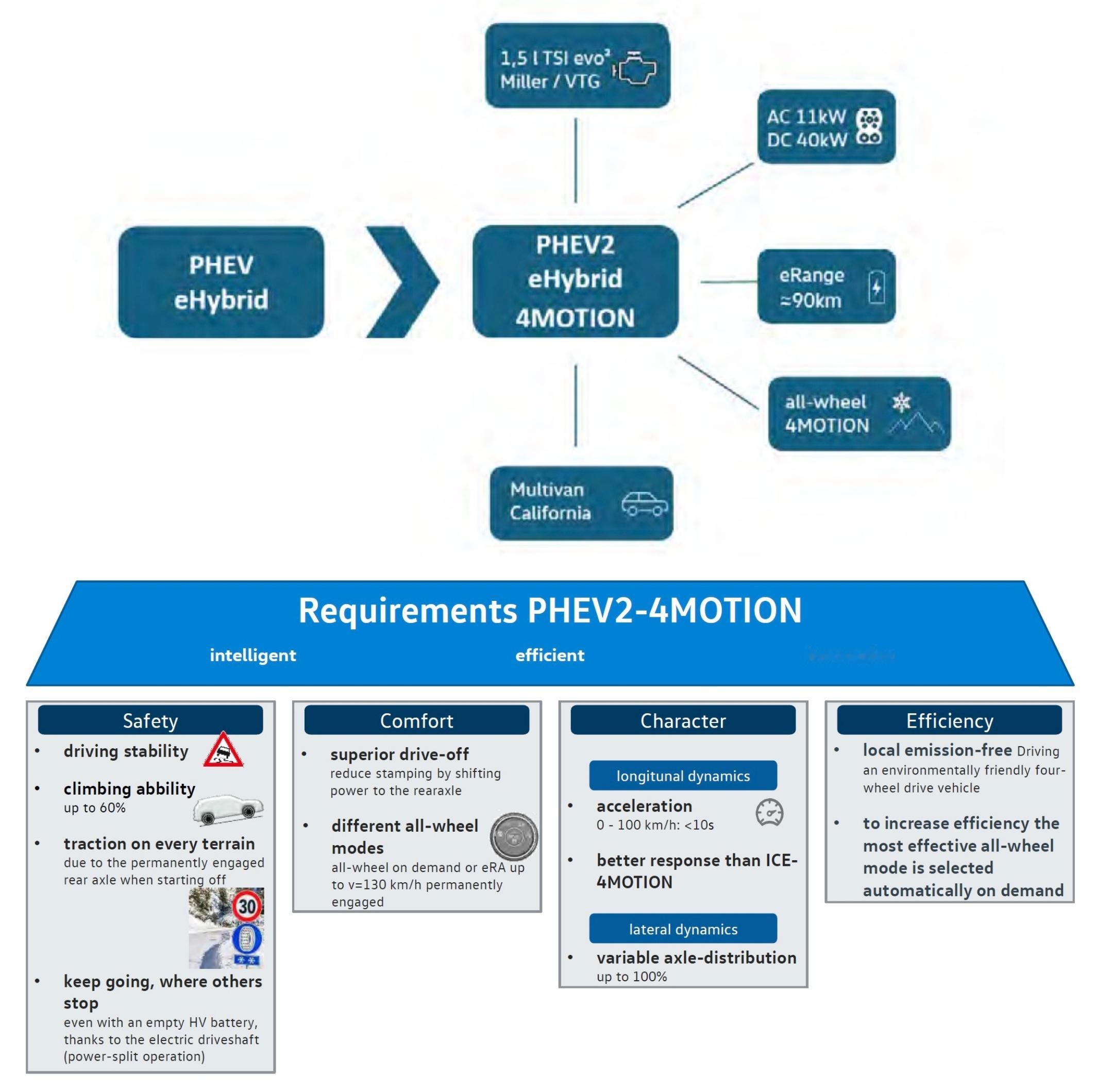
首先,改款后的混动是基于大众的PHEV2构架的,PHEV2构架主要是有4点变化:
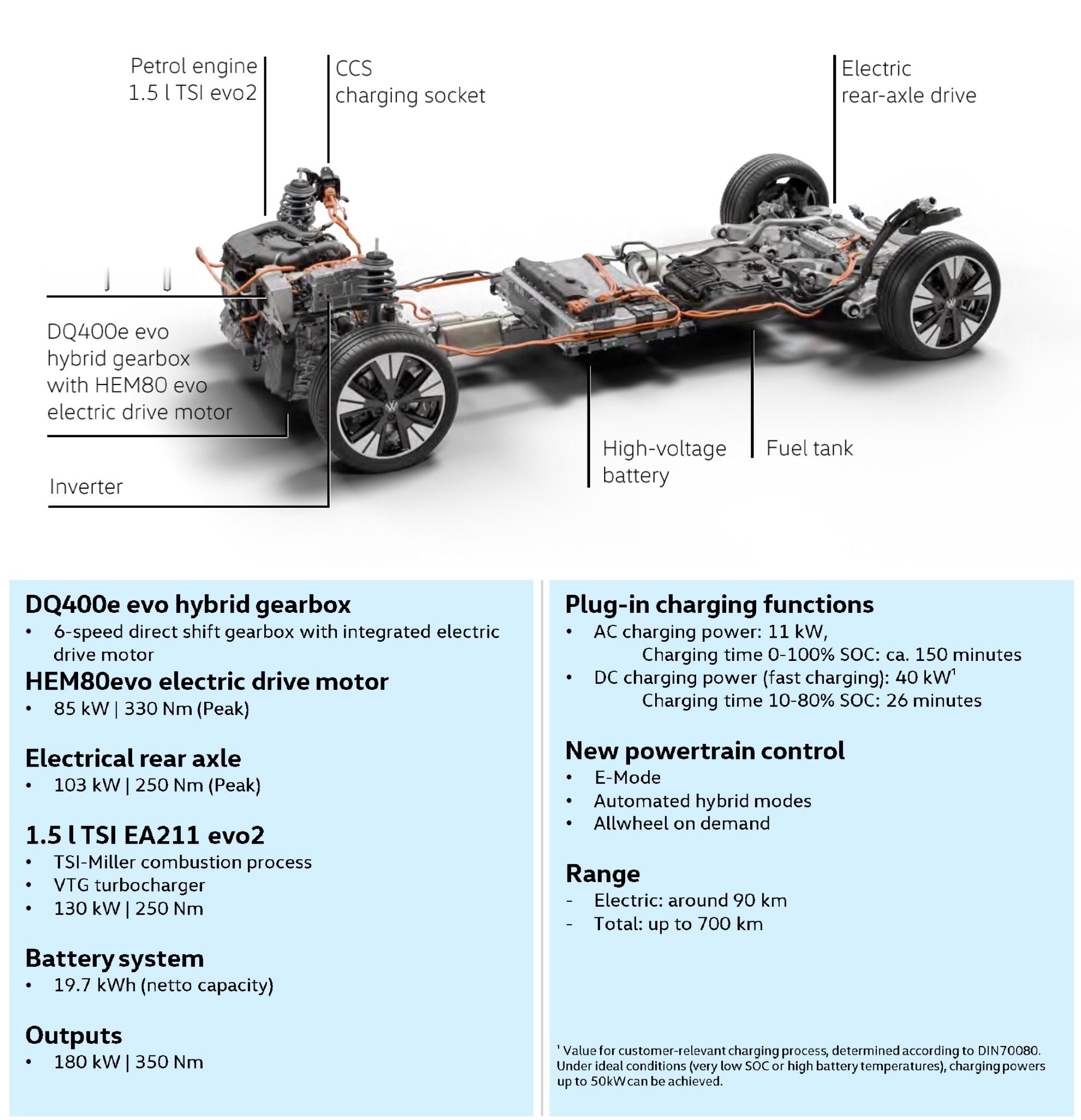
· 发动机升级成EA211 Evo2 1.5T
· 变速箱升级为DQ400E Evo, 全油冷设计
· 电池容量增加到20度,支持近100km的城市纯电续航
· 支持DC快充实现快速补能
T7 4motion就是在这个基础上加上了后电驱桥。
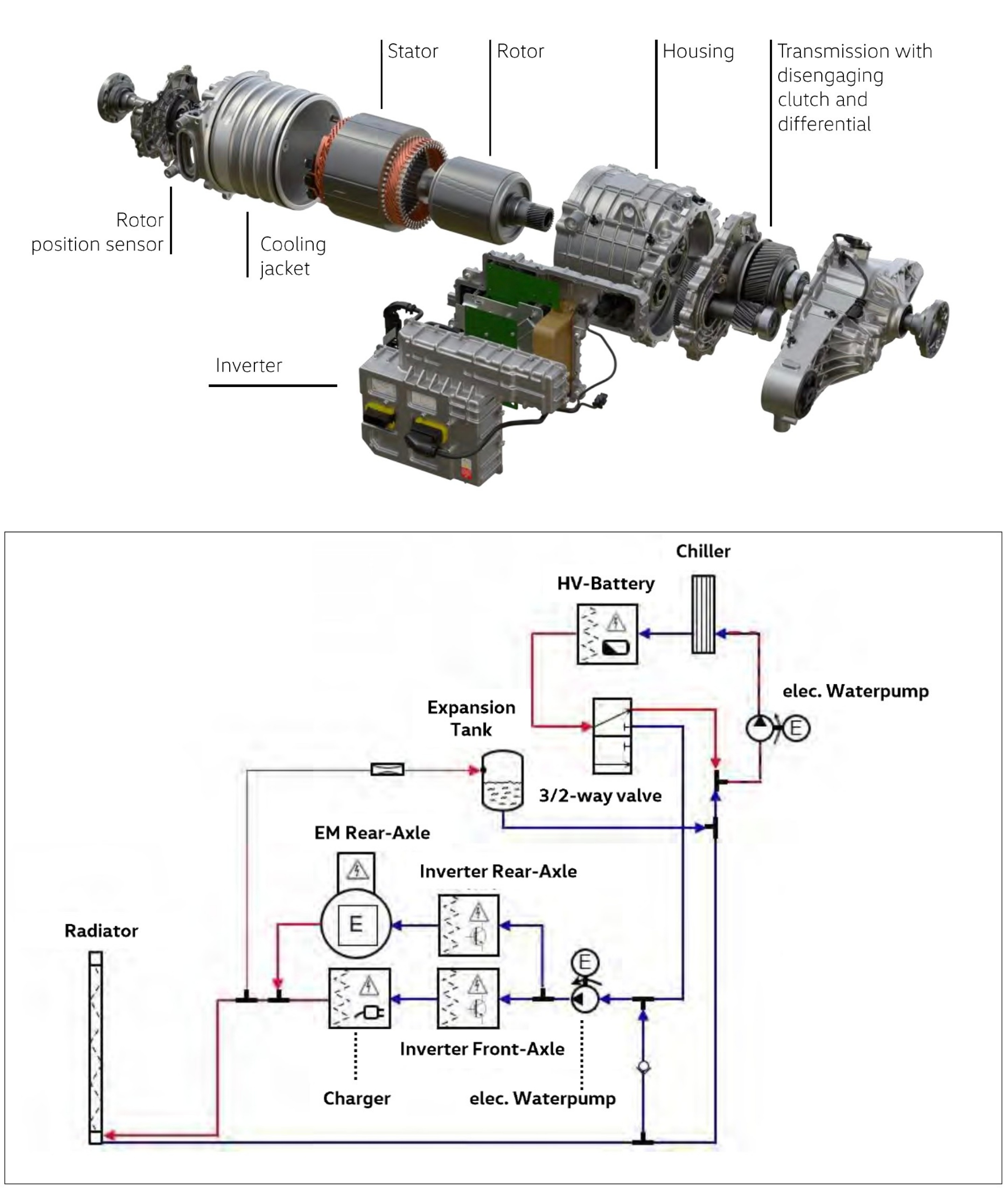
这个电驱桥的供应商是“大名鼎鼎”GKN。其是一个三合一系统,由变速箱、电动机和逆变器组成。为了提升效率,永磁电机是必不可少的,峰值输出功率为140PS,最大扭矩则为250Nm,传动比为10:1。其能力可以支持车辆纯电行驶到130km/h。内部有一个狗牙离合器,可以断开驱动轴与电机的连接。
电驱桥的电机和其电控采用水冷设计,与高压电池和逆变器一起接入独立的第二条低温水路。
「控制策略」
同样的,T7 4motion也有三种驾驶模式
经济模式下:
最大系统输出纯电模式85kW,混动模式95kW
轮上最大综合扭矩4000Nm
1.5T发动机限制最大扭矩为220Nm,最大功率为95kW
舒适模式:
最大系统输出纯电模式85kW,混动模式150kW
轮上最大综合扭矩4800Nm
1.5T发动机没有性能限制
运动模式:
最大系统输出纯电模式85kW,混动模式180kW
轮上最大综合扭矩5621Nm
1.5T发动机没有性能限制
这个电驱桥的控制还是走的传统路数,由ECU来进行控制,同时与两个电动机通信,实现驱动系统的耦合和解耦策略。
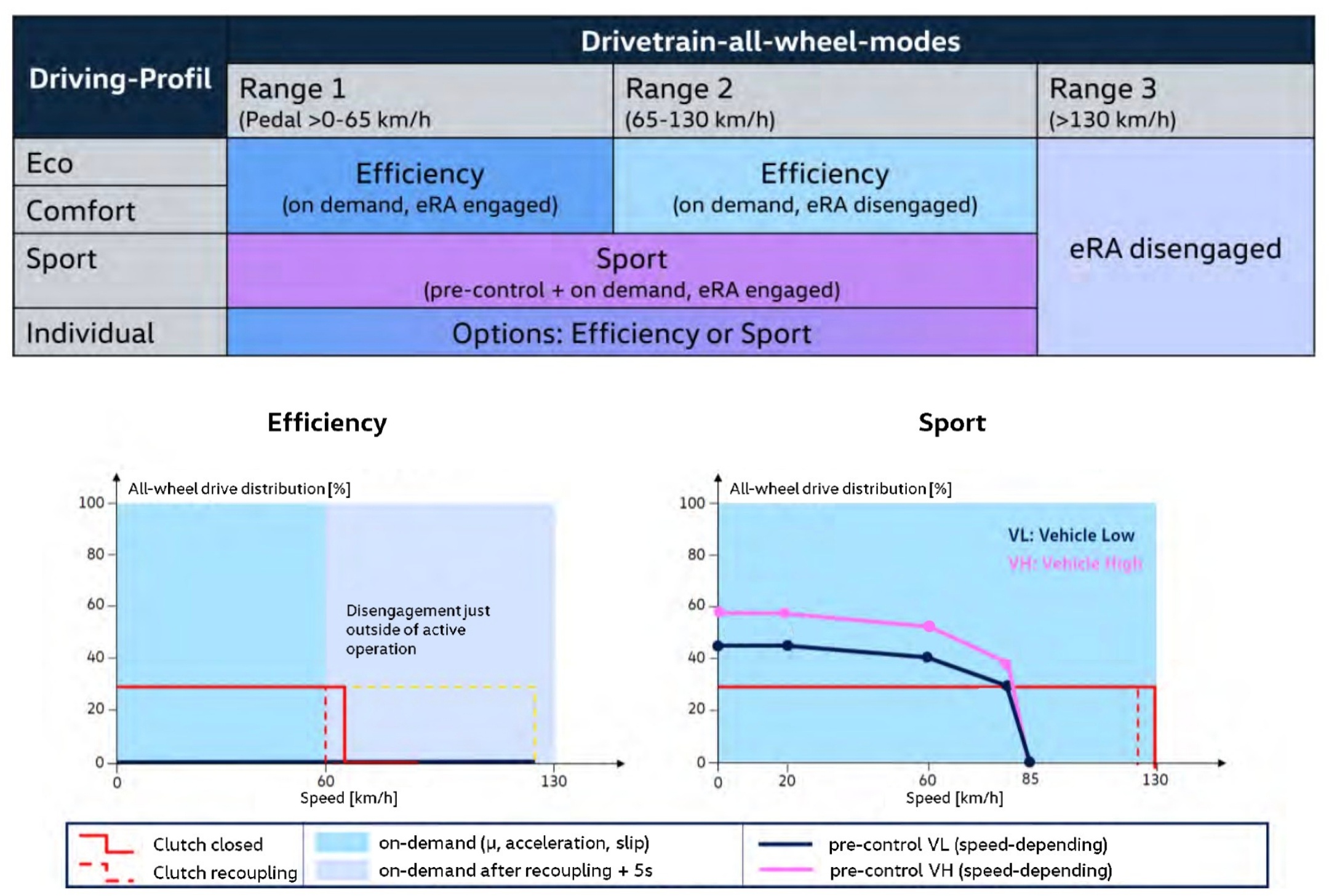
由于狗牙离合器在80km/h速度范围内需要400ms的时间来同步接合,更高速甚至要600ms。所以为了保证响应,电驱桥在经济和舒适模式下,在65km/h时速范围内狗牙离合器常耦合,时刻准备着提供支持。在65km/h到130km/h之间则按需要接合。在130km/h则因为硬件限制而强制断开。
而四驱的驱动力分布也针对不同的情况做了分类。在舒适和经济模式下,虽然狗牙离合器一直接合,但后电机其实基本不输出动力,如果需要输出动力,只会分配总驱动力的30%到后轴。在运动模式下,ECU则会估算车辆的重量,根据车重和时速,预先给后轴加载动力,在低速高负载的情况下,后轴会承担60%的驱动力。到85km/h之后,预加载就会停止,转由按需输出模式。
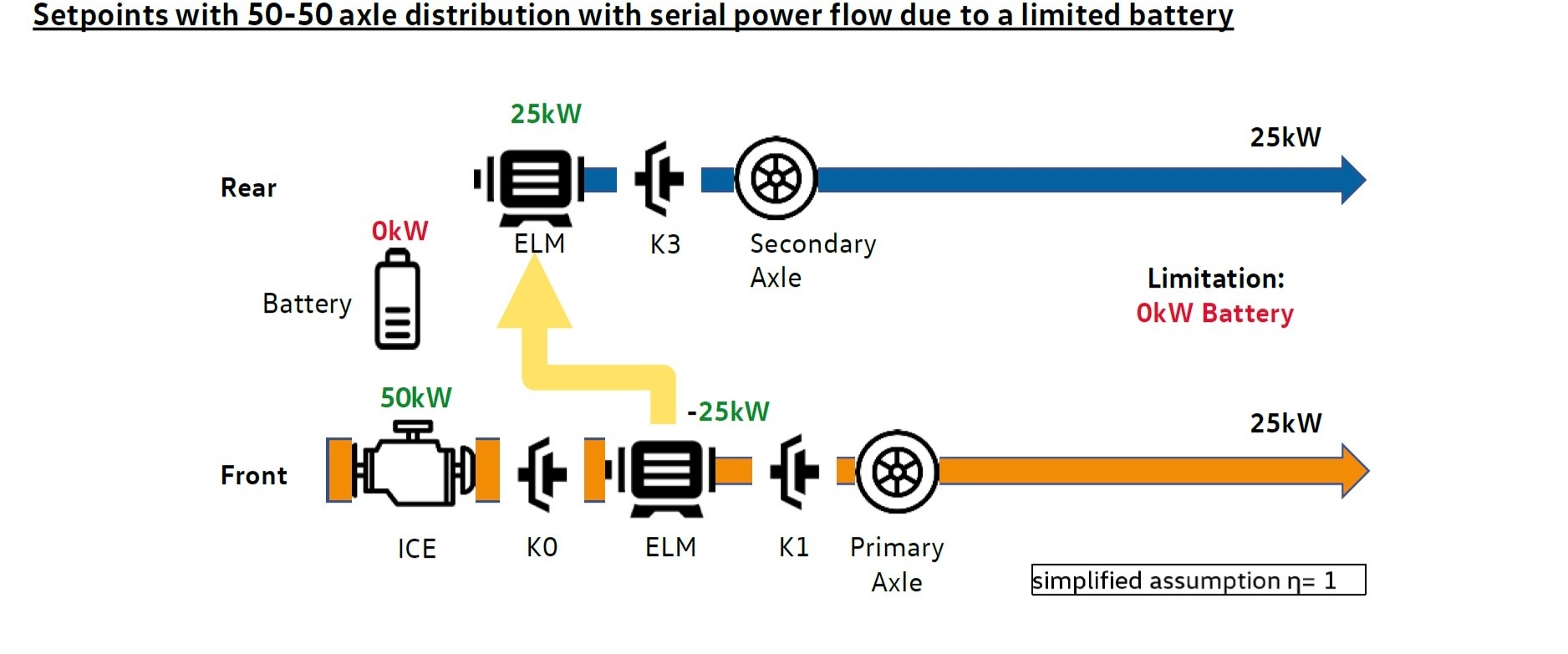
「功率分流」
这是我觉得还算是一个可说的。像这种传统的P2+P4的构架,其实一般是不支持功率分流的策略的。大众则在这里加上了有限度的功率分流。
也就是说,当电池没电或者由于温度原因无法提供足够的输出功率给到后轴,那么就可以通过P2电机发电,给到P4电机,依然保证四驱的可用性。例如这里50kW发动机输出,通过P2电机发出25kW的电机给到P4电驱桥,剩余的功率将继续驱动前轮,保证了四驱。
「问题缩影」
由于大众是第一次做这个,无论是软件开发还是供应商的整合难度对于目前的大众来说都不是容易的事。所以这个四驱车型也被推迟了将近2年的时间才出来。早期还规划了一个性能款,但惨遭。。。。
即便如此,大众依然非常“骄傲”觉得自己创造了一台很不错的车,然后卖到10多万欧的高价。现在狼堡路上跑的车都是高配版的公车,里面的高管们都在沾沾自喜,却不知道已被抛离。