大家好!今天来来了解一篇关于基于合成射流的微型模块化可重构水下机器人的研究——《Miniature Modular Reconfigurable Underwater Robot Based on Synthetic Jet》发表于《Advanced Science》。水下环境复杂多变,传统机器人面临诸多挑战。本研究提出新方案,通过合成射流原理,设计独特执行器与运动模块,采用多种配置策略,力求解决现有问题,展现出卓越的性能与潜力,为水下机器人技术带来新突破。
*本文只做阅读笔记分享*
一、研究背景
(一)模块化可重构机器人的需求
在现代社会,机器人在各个领域发挥着不可或缺的作用。然而,传统单体机器人通常针对特定任务设计,在不可预测和非结构化环境中,机器人需要具备多样化的运动能力和功能特性,以满足不同任务需求。例如,在海洋探索中,机器人可能需要在不同地形和环境条件下执行任务。此外,机器人在故障时需及时修复,以确保任务可靠性,这就促使了模块化可重构机器人的发展。
(二)水下环境对机器人的挑战
水下环境对机器人提出了更为严格的要求。在狭窄或浅水的水生环境中,如珊瑚礁或浅滩区域,机器人的运动可能会受到礁石、珊瑚等障碍物的阻碍,同时电缆或其他连接方式也会限制其运动范围。这就要求水下机器人具有小型化和集成化的特点。此外,水下环境的推进方法和密封要求使得机器人的模块化设计更加复杂。
(三)现有水下推进策略的不足
目前的水下推进策略包括常规的螺旋桨推进,如在大型自主水下航行器(AUV)中广泛应用,但螺旋桨不适用于狭窄空间;仿生推进方法,如体尾鳍(BCF)和中对鳍(MPF)推进,其机制复杂,难以实现模块化设计和运动控制;射流推进器虽然模仿了头足类动物的运动原理,但传统射流推进器需要独立的进出口,结构复杂。而合成射流作为一种新的推进方法,仅需一个喷孔,基于高频小振幅振动实现运动,具有结构紧凑、响应快、控制简单和制造成本低等优点,但现有研究中的激励源存在问题,如压电材料、介电弹性体和传动机构等需要高激励电压和特殊信号,无法消除线束约束,难以实现控制系统集成。
(四)研究思路
针对上述问题,研究人员提出了基于合成射流推进机制的模块化解决方案,开发了一系列集成模块化可重构机器人。在设计过程中,从合成射流执行器、单运动模块、组合策略到应用前景进行了全面研究。

二、合成射流机制与合成射流执行器设计
(一)合成射流执行器的重要性
合成射流执行器是运动模块的关键推进组件,它直接决定了模块的运动效果和整体尺寸,因此其设计对于整个模块化可重构机器人系统至关重要。
(二)执行器类型及结构
研究人员设计了底部和侧面两种射流执行器。两种执行器均采用防水偏心旋转质量(ERM)振动电机作为激励源。底部射流执行器的喷腔呈圆锥形,喷孔位于底面,在振动源的直接激发下可产生垂直于底部的射流;侧面射流执行器的喷腔近似斜圆锥形,喷孔在侧面,用于产生垂直于侧面的射流。

(三)执行器工作原理
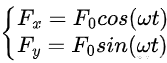
ERM电机通过电机底座安装在薄板中心,与喷腔固定在一起。电机在直流电源驱动下,偏心质量旋转产生椭圆振动,其离心力F(t)表达式为
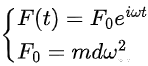
(其中是F0离心力振幅,m是偏心质量,d是偏心距离,w是旋转速度),该离心力在水平和垂直方向产生的简谐振动为
薄板在电机激励下产生不同振动形状,实验发现第一和第四模式具有稳定的吸排能力,可有效应用于合成射流驱动。通过实验和模拟,选择薄板尺寸为Φ30mm×0.25mm,使第四共振频率为228.35Hz,与电机频率匹配。

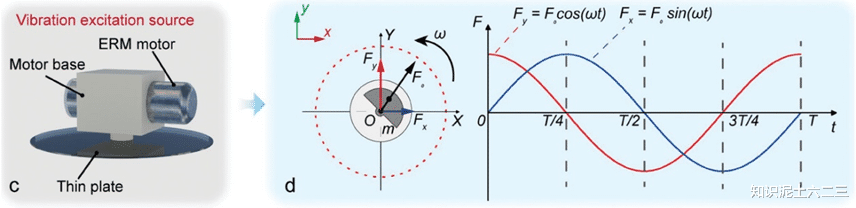
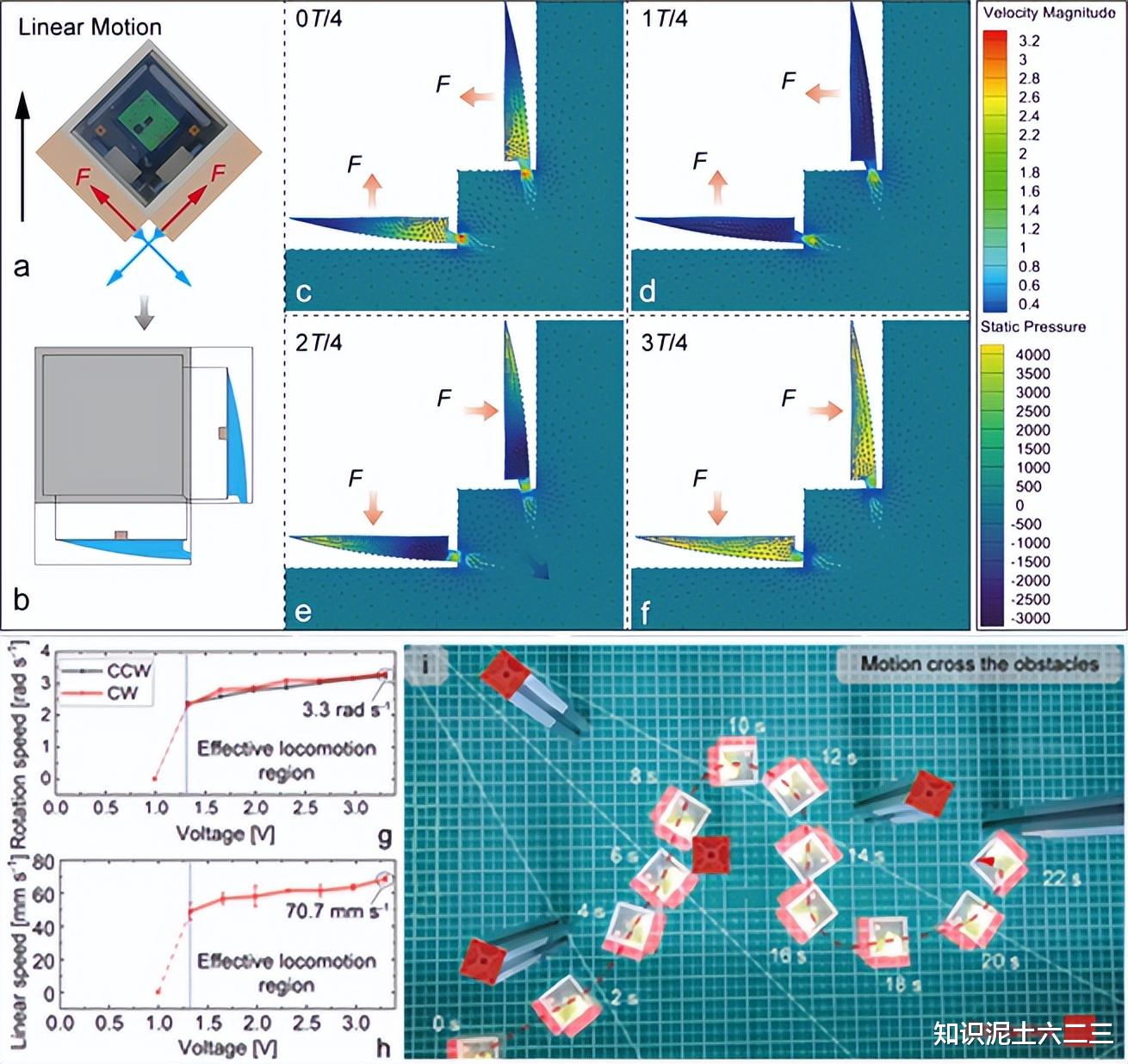
基于此进行流体-结构相互作用模拟,观察到射流执行器在一个周期内的吸排现象和稳定的涡环运动。

通过粒子图像测速(PIV)方法观察合成射流的发展过程,测量射流执行器的净力约为7mN,可产生有效推进效果。

三、多自由度合成射流运动模块设计
(一)模块结构与参数
运动模块设计为具有多自由度自推进能力,采用近似立方体外观,尺寸约为48mm×38mm×38mm,质量约79.0g。其内部集成了电源、控制和通信电子系统,实现远程控制。通过合理的结构设计和组件分布,实现了重力与浮力的平衡,使模块能够悬浮在水中。

(二)射流执行器布局与运动方式
在模块的中间框架上固定三个射流执行器,分别实现模块在x、y、z方向的运动。底部射流执行器用于模块的上升运动,两个侧面射流执行器用于平面运动。

单侧侧面射流执行器工作时,产生的推进力会使模块围绕质心旋转;两侧面射流执行器同时工作时,射流合并产生线性力,推动模块直线运动。底部射流执行器工作可实现模块上升运动,速度可达28.7mm/s,关闭时模块自动下降。

通过流体-结构相互作用模拟直线运动情况,实验测得模块最大旋转速度约3.3rad/s,最大线性速度约70.7mm/s,且运动速度在1.3-3.3V电压范围内稳定,电压降至约1.0V时速度瞬间降为0。此外,模块还能实现受控运动,绕过障碍物到达目标位置。
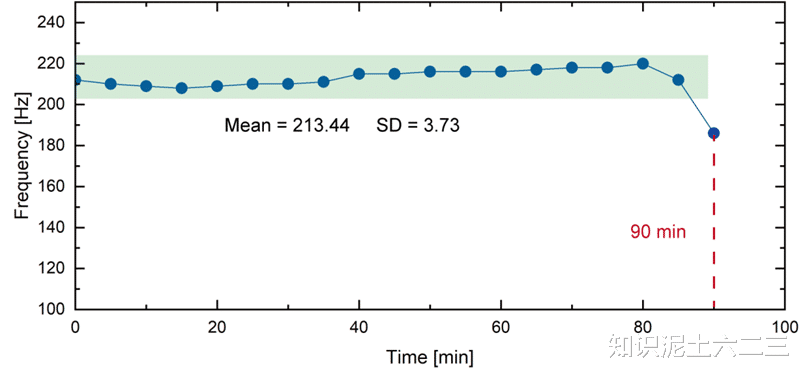
(三)运动模块的耐久性测试
在实验中,将射流执行器的激励电压设置为3.3V,电池容量约为200mAh。测试结果表明,单射流执行器工作时,模块耐久性约85min;两射流执行器同时工作时,耐久性约50min;三射流执行器同时工作时,耐久性约30min。由于电压稳压单元的设计,驱动性能在整个过程中相对稳定,最后阶段突然下降。
四、不同模块的配置策略
(一)模块间的耦合方法
多个运动模块或与中间模块连接时,采用磁耦合方法。这种方法结构简单紧凑,具有良好的自对准能力,能够简化对接过程,提高连接精度。同时,对连接的可靠性进行了评估。

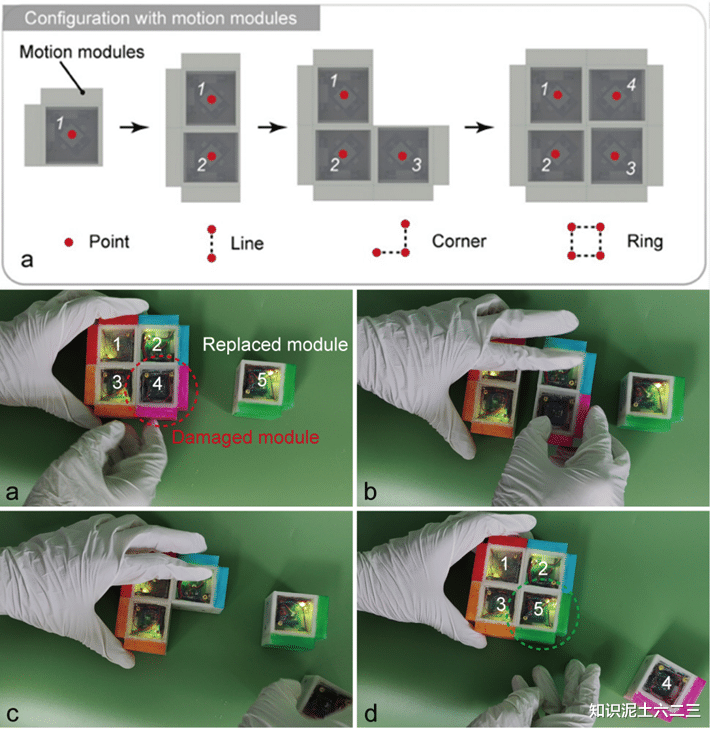
(二)同质运动模块的连接配置
两个、三个或四个运动模块连接时,可实现从点到线、角和环的扩展。这些配置增加了机器人系统的运动冗余,提高了整体的敏捷性和鲁棒性。例如,当某个运动模块损坏时,可以方便地进行替换。
(三)与中间模块的连接配置
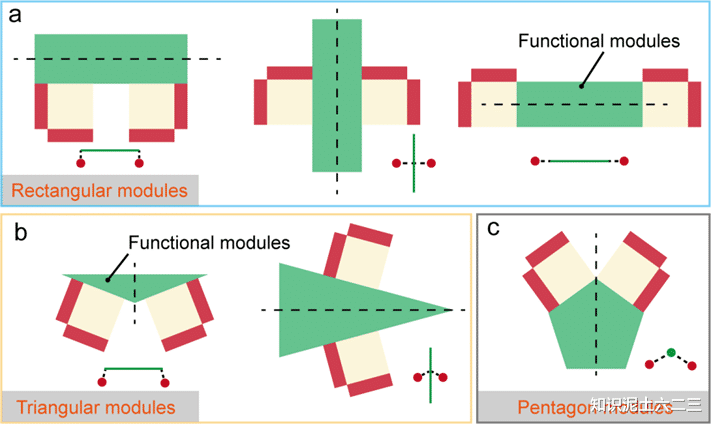
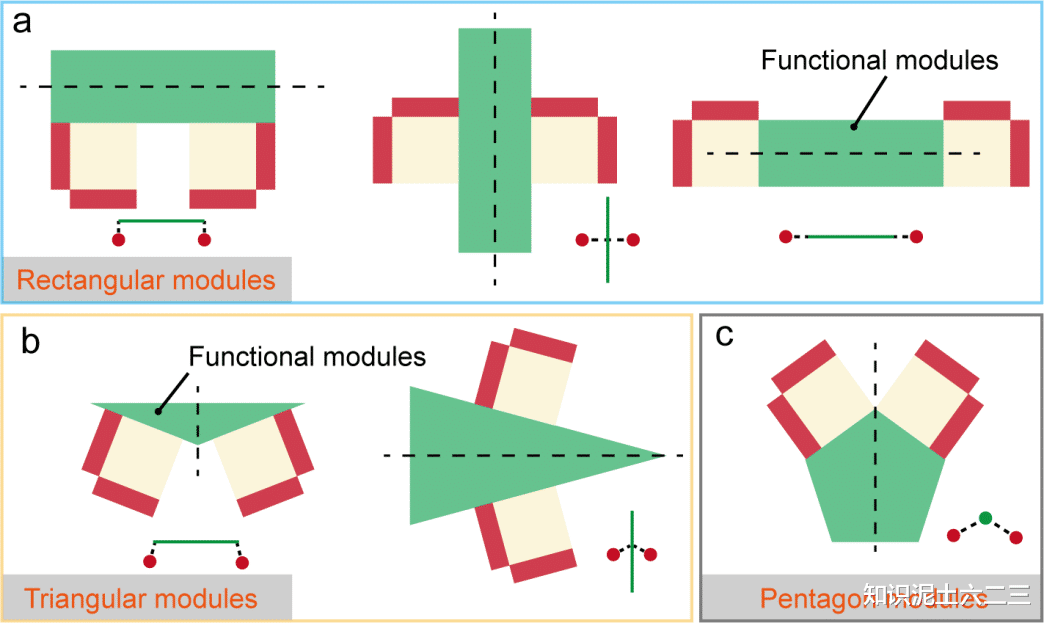
运动模块可与中间模块(功能模块或辅助模块)连接,中间模块的不同设计可显著扩展组合方案和应用潜力。例如,采用简单立方中间模块时,有对角和线性两种基本配置,对角配置更紧凑,线性配置扩展性更好。
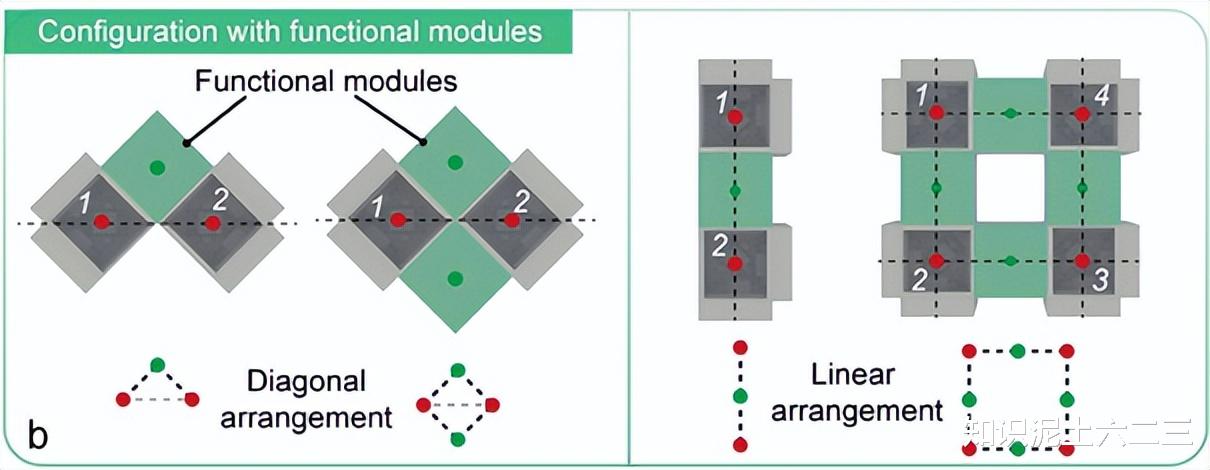
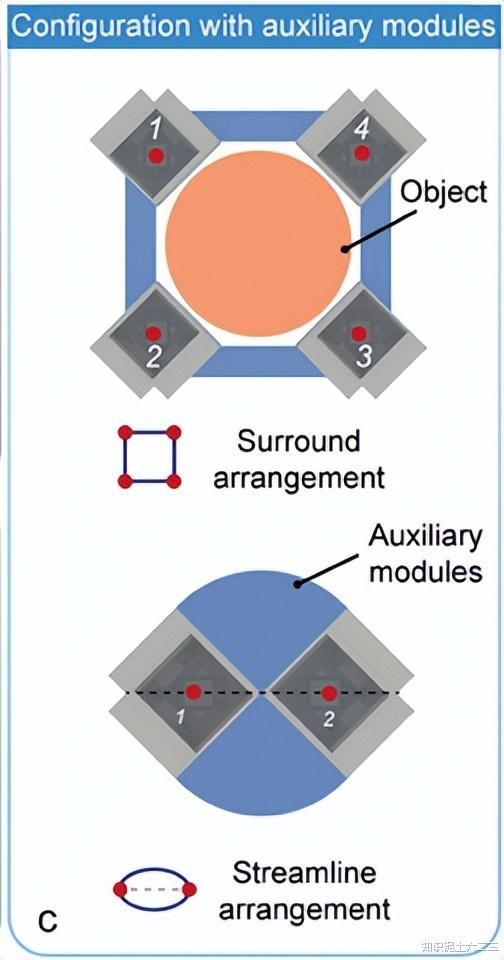
与辅助模块组合时,可根据物体形状进行调整,如对于球体或圆柱体等光滑表面物体,运动模块可与辅助模块组合成环实现运输,并通过辅助模块优化自身形状,提高运动性能。
对于不同形状和尺寸的中间模块(如长方体或棱柱体),其配置方式如图所示。
五、同质运动模块间的配置实验
(一)双运动模块的运动策略
双模块配置中,通过在非射流中间框架表面布置小永磁体实现模块连接。该配置下的组合机器人系统具有两个底部射流执行器(BJAs)和四个侧面射流执行器(SJAs),在水中的运动能力比单模块更敏捷。激发不同的侧面射流执行器可实现顺时针或逆时针旋转运动,由于臂长不同,产生的力矩不同,可分为主(SJA1L和SJA2R)和次(SJA1R和SJA2L)射流执行器,分别激发时旋转速度不同。同时激发两侧面射流执行器可实现直线运动,最大运动速度约77.6mm/s,与单模块运动速度相当,且运动速度在约1.0V电压时急剧下降。

(二)四运动模块的运动策略
四模块配置中,运动模块同样通过永磁体连接,连接后的机器人系统尺寸约为96mm×96mm×51mm,具有四个底部射流执行器(BJA1-BJA4)和八个侧面射流执行器。八个侧面射流执行器协同工作,可实现四个稳定状态的顺时针和逆时针旋转,单个射流执行器推进时旋转速度约1.6rad/s,四个射流执行器同时推进时可达2.5rad/s。

在直线运动方面,可沿平面内所有边缘方向和对角线方向灵活移动,如同时激活一侧的两组射流执行器可实现边缘方向的直线运动,速度约81.4mm/s;沿对角线方向的线性运动有两种状态,对角对称射流执行器同时推进或单个角模块推进均可产生对角线直线运动,速度分别约为63.0mm/s和62.1mm/s。

不同组合的射流执行器激发时,四运动模块系统在八个方向的直线运动轨迹体现了其高敏捷性。但模块数量增加可能会因质量和阻力增加而降低运动参数,不过稳定性和鲁棒性的提升可弥补这一缺陷,实际应用中应根据需求确定模块配置。

六、功能模块配置实验
(一)功能模块验证实验
利用与运动模块尺寸相似的简单立方中间模块,验证机器人在水中的运输和检测等基本功能。

双运动模块采用对角配置推动可替换中间模块,中间模块可根据需求设计为不同功能模块,如物体运输模块和图像采集模块。在运输实验中,将20g标准砝码放置在运输模块内,双运动模块可推动其实现前进、后退直线运动和顺时针、逆时针旋转运动,最大直线速度分别为46.8mm/s和44.9mm/s,最大旋转速度分别为1.8rad/s和1.5rad/s。在图像采集实验中,将运输模块替换为图像采集模块,控制机器人绕过障碍物并返回,图像采集模块记录过程。

(二)不同配置的特点
对角配置灵活性高,可实现多种运动;线性配置虽不能实现后退直线运动,但因其细长尺寸可通过狭窄通道,这体现了不同配置在不同场景下的适用性。

七、研究结论
(一)合成射流推进的优势
本研究证明了合成射流原理在水下机器人模块化和小型化设计中的优势。合成射流推进机制简单,无需复杂的推进机构,便于模块化设计和与其他模块连接;其激励方案简单,射流结构紧凑,有利于在小尺寸下实现整个机器人的集成。通过与其他水下机器人的运动速度比较,本研究中的运动模块在尺寸和运动速度方面性能优越。

(二)模块化可重构机器人的特性体现
该模块化可重构机器人系统充分体现了高适应性、高鲁棒性和低成本的特性。多模块组合的冗余性使单个模块故障对整体功能影响小,仅导致参数下降,且任意运动模块可替换,保证了系统在应用中的可靠性;通过不同模块组合可适应不同运动环境,功能模块可按需替换,只要耦合接口一致即可;运动模块采用3D打印制造,降低了单个模块成本,模块替换也降低了系统维护成本。
(三)面临的挑战与改进方向
然而,该机器人系统在进一步应用中仍面临挑战。运动模块因尺寸限制,耐久性不足,无法独立长时间工作。后续研究考虑与水面平台合作,实时监测运动模块的耐久性和与平台的距离,低电量时发送回收信号,实现模块的回收、充电或采用单独的浮力或充电模块精确配置浮力。此外,当前采用的永磁体耦合机制无法实现自重构,可采用电磁连接方法并结合位置和姿态传感器,利用磁铁的自对准能力实现自动连接,还可在水面平台上装配辅助设备协助模块连接。未来,将改进运动模块、开发更多功能模块(如水质量传感和声音采集等),优化控制策略,使机器人系统在水下环境中发挥更大作用,完成从环境探索到数据采集再到狭窄空间长期监测等一系列任务。
八、一起来做做题吧
1、模块化可重构机器人的主要优势不包括以下哪一项?
A. 高适应性
B. 高成本
C. 高鲁棒性
D. 可根据需求改变结构和功能
2、合成射流执行器中,哪种振动模式能有效应用于射流驱动?
A. 第一和第二模式
B. 第二和第三模式
C. 第一和第四模式
D. 第三和第四模式
3、运动模块中,实现上升运动的是哪个部件?
A. 单侧侧面射流执行器
B. 两侧侧面射流执行器
C. 底部射流执行器
D. 中间框架
4、多个模块间连接采用的磁耦合方法具有以下哪种优点?
A. 结构复杂但连接牢固
B. 自对准能力强,简化对接过程
C. 无需考虑连接可靠性
D. 仅适用于大型模块连接
5、在双运动模块配置中,激发哪个射流执行器可使组合机器人系统产生顺时针旋转运动?
A. SJA1L或SJA2R
B. SJA1R或SJA2L
C. SJA1L或SJA2L
D. SJA1R或SJA2R
6、在功能模块配置实验中,运输实验采用了哪种模块配置?
A. 线性配置
B. 对角配置
C. 环形配置
D. 随机配置
参考文献:
Wang D, et al. Miniature Modular Reconfigurable Underwater Robot Based on Synthetic Jet. Adv Sci (Weinh). 2024 Oct;11(39):e2406956.