今年毫无疑问是探月大年,先是旨在登陆月球正面的美国航天机器人技术公司的游隼号探测器先声夺人,遗憾的是遭遇了燃料泄漏无缘登月,再过几天还有日本JAXA的SLIM探测器也将尝试登月,今年美国还有4个无人探测器也都计划登月,它们都是NASA商业月球有效载荷计划的发射项目,而该计划也从属于旨在载人重返月球的阿尔忒弥斯计划。
除上述任务外,中国的嫦娥六号探测器也已经运抵海南文昌航天发射场,它将为人类首次获取月球背面样本,此次任务也是我国第二次月球采样返回任务,计划于今年上半年实施发射。


嫦娥六号探测器运抵海南文昌
回顾以往,还从没有哪个年份有如此密集的登月任务安排。
进入21世纪以来,在月球探测领域,中国航天的嫦娥探月工程毫无疑问是排头兵,嫦娥一号、嫦娥二号、嫦娥三号、嫦娥五号T1、鹊桥号、嫦娥四号、嫦娥五号,一系列任务接续实施,这些任务无一例外全部成功。
尤其是嫦娥三号、嫦娥四号、嫦娥五号,三次登月次次成功,成功率高达100%,我们登完月球正面,又征服了月球背面的复杂崎岖地形的登陆任务,以嫦娥四号任务成功为标志,我们拥有了基于科学任务需求,在月球表面任意选择着陆区的“全月面到达能力”。
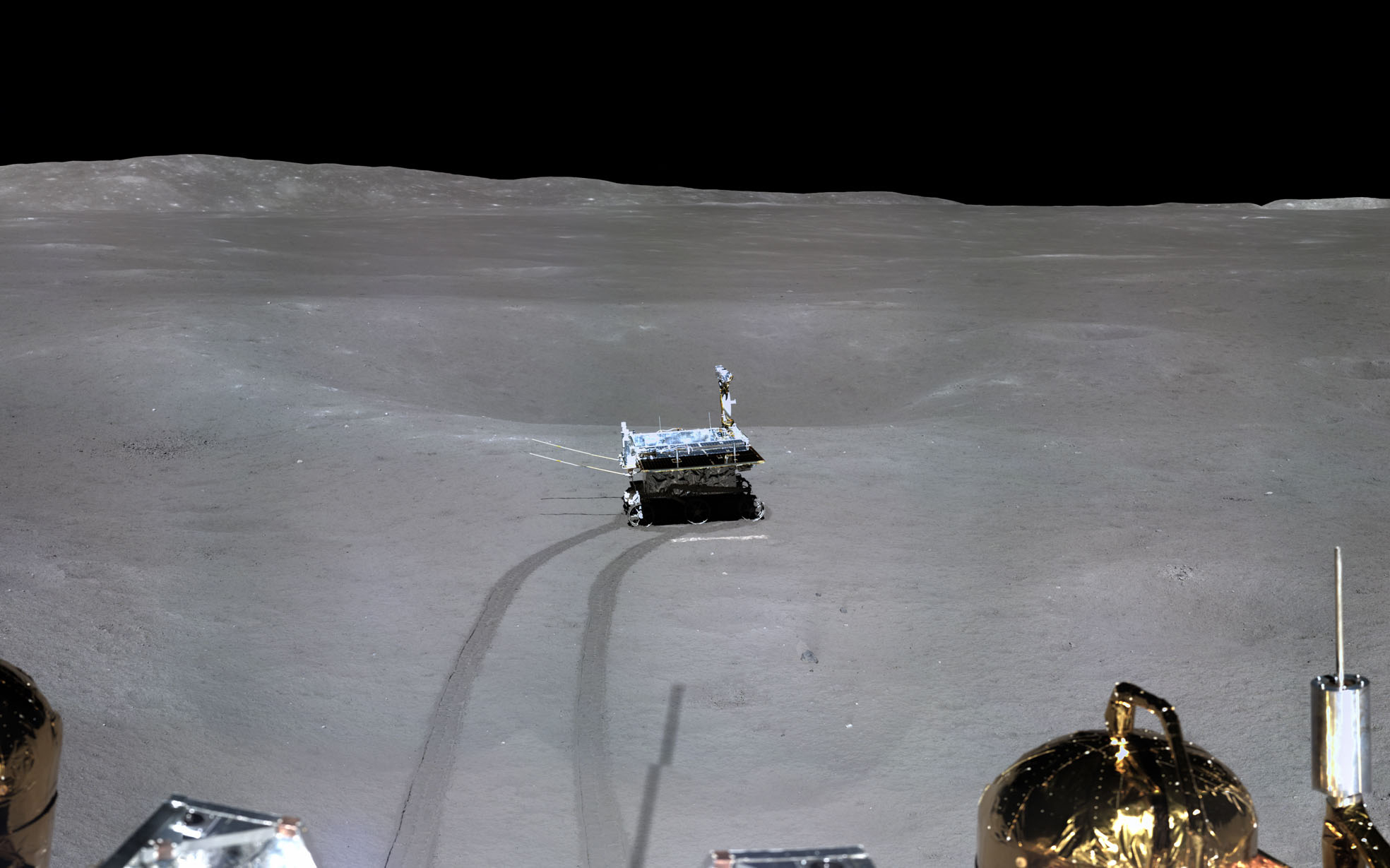
嫦娥四号着陆器拍摄的玉兔二号月球车
全月面到达能力是通过嫦娥四号任务的实践得以验证,但却是由嫦娥三号的工程技术开拓得以建立,后者首创基于机器视觉理念的登月技术方案,首次终结了人类无人探测器盲降月球的历史。

嫦娥三号悬停段成像
在嫦娥三号之前,人类研制的各型登月探测器无一例外均不具备在登月航迹末段自主识别月面障碍并加以规避的能力,就连用于载人登月的阿波罗登月舱也不例外,阿波罗登月舱是通过宇航员的肉眼识别障碍,是“人在回路中”。
自嫦娥三号至嫦娥五号,我国航天始终占据着人类登月技术的制高点,嫦娥五号之后,印度航天的月船三号也收获成功,这也是一款基于机器视觉理念的登月器,不过月船三号是基于月船二号登月失败的经验教训才得以成功,成功率就目前的实践结果看只有50%,与我们的100%成功率相比,在可靠性与成熟度方面仍有差距。
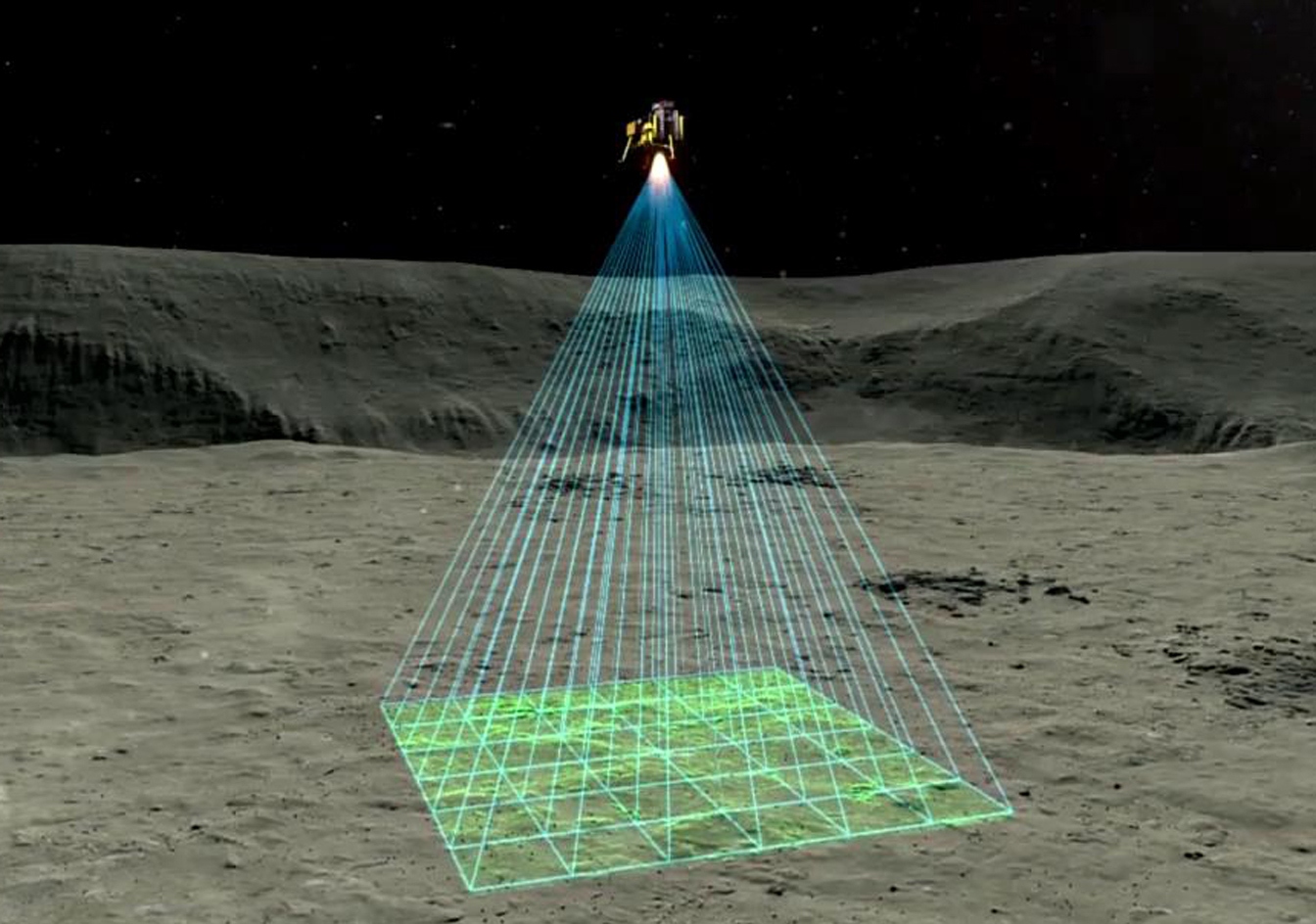
嫦娥系列着陆器激光三维成像效果图
相较于美国航天,在登月技术领域中国航天领先美国航天至少10年,这丝毫不是什么夸张,就拿刚刚失败不久的美国游隼号着陆器为例,连地月转移轨道都没有进入,再拿它遭遇的燃料泄漏为例,我们当年的嫦娥四号探测器在发射不久同样也遭遇了燃料泄漏。
游隼号着陆器监视相机拍摄画面

嫦娥四号与火箭分离后不久也曾遭遇燃料泄漏
不同的是,由于我们准备充分,处置得当,在最短的时间内避免了燃料的持续泄漏,拿出了轨道优化方案,最终在燃料泄漏的情况下,仍然拿下了首登月球背面的历史壮举。 成功着陆月球背面冯·卡门撞击坑的嫦娥四号着陆器与玉兔二号月球车运行至今已有五年,而游隼号却只剩下再入地球大气层销毁这一条不归路,二者所体现的工程技术能力不可同日而语。
接下来,人类探月的重点将放在月球南极区域,因为月球极区与地球极区一样,也存在连续光照现象,加之地形因素,月球极区的某些高地区域的连续光照条件更为充分,有了连续光照,就意味着基于太阳能发电的探测器可以有更为稳定的能源供给,从而大幅延长探测时间,提高探测效率。
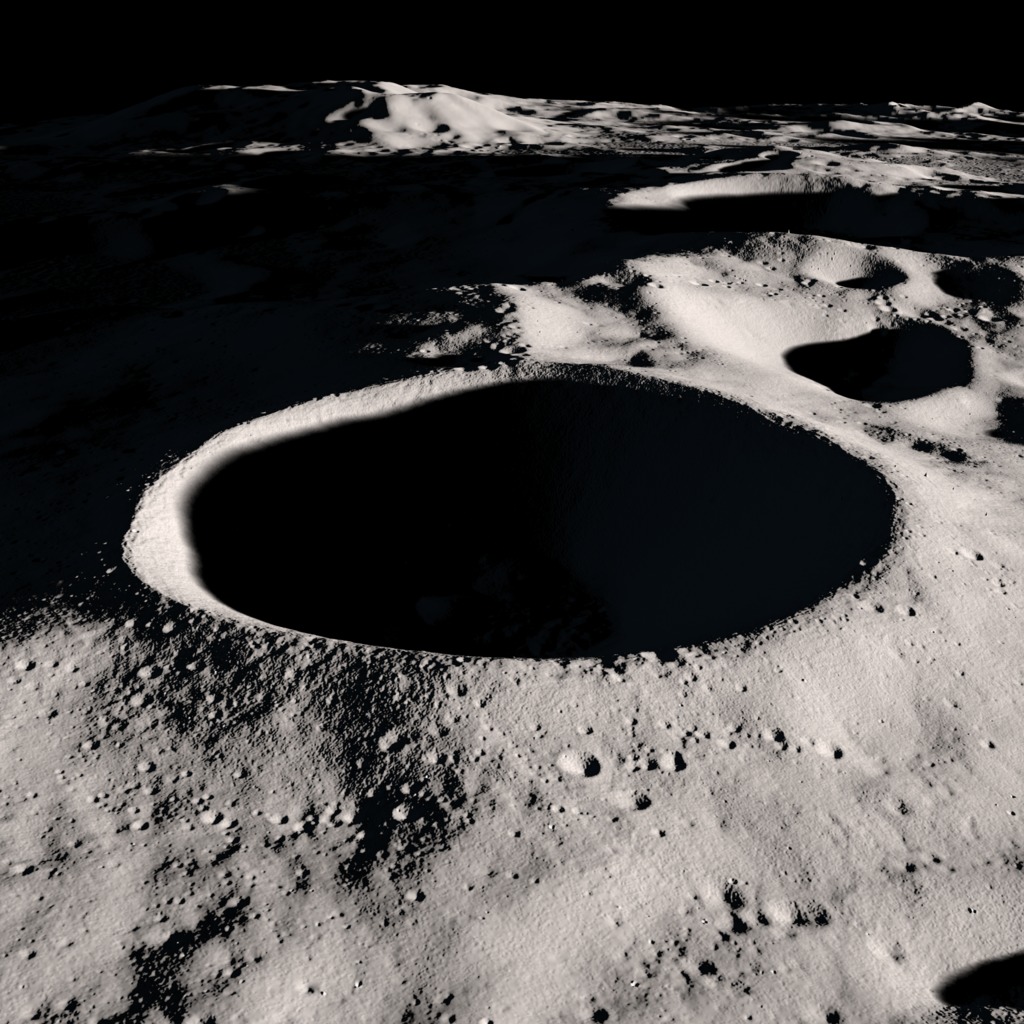
月球极区的连续光照区与永久阴影区相伴相生
同时,又因为地形遮挡,有连续光照的区域附近通常也存在常年无光照的永久阴影区,在永久阴影区内则可能存在水冰资源,这一点已经被诸多遥感探测数据所间接证实。
水冰资源对于深空探测,乃至未来的月球深度开发而言,都是极为难得的资源,有了水冰不仅能解决航天员长驻月球的人员用水需求,还可以用于制备氢氧火箭发动机所需的燃料,因此称其为“战略资源”也丝毫不是什么夸张。
既有连续光照的能源供给优势,又有水冰资源,这就是为什么月球极区探测如此被看重的原因。
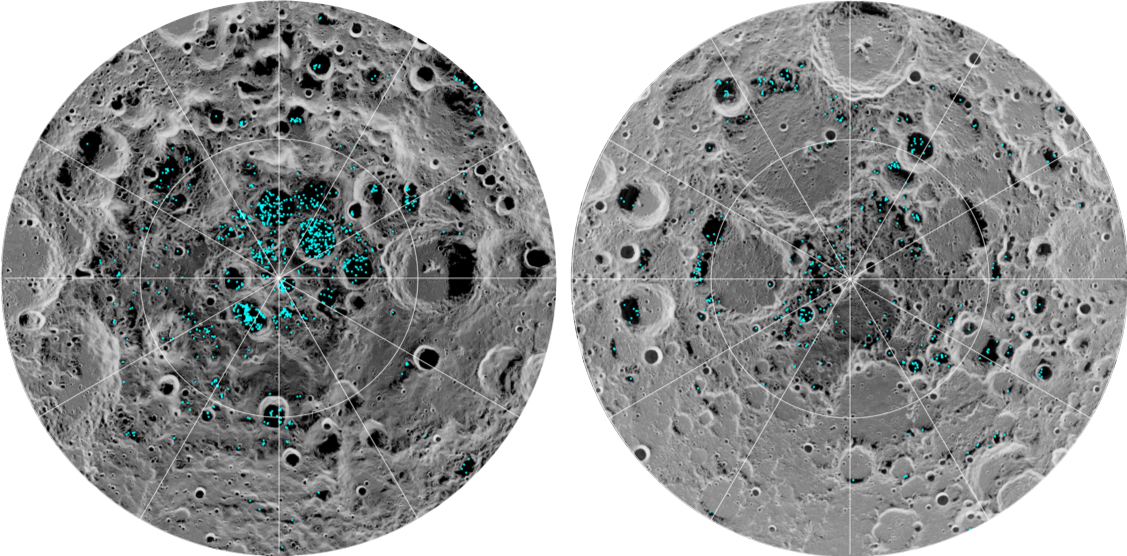
月球极区的水冰分布(左图南极,右图北极)
通过月球遥感探测数据可知,月球南极水冰资源更为集中,易于探测开发,而月球北极的水冰资源则相对更为分散,因此月球南极就成了重中之重。
我国继嫦娥六号之后的嫦娥七号探测器就将是聚焦月球南极探测的又一款旗舰级探测器,计划于2026年前后发射,基于嫦娥六号的官宣惯例,去掉“前后”一词的时间基本就是实际瞄准的发射时间。
虽然嫦娥七号要到后年才能发射,但它的先头兵再过几个月就要踏上征程,这就是鹊桥二号中继卫星。
原计划嫦娥七号探测器是一款由五个探测器组成的多器联合的大规模探测器,分别是轨道器、着陆器、巡视器、飞跃探测器、中继卫星,探测器发射总质量达到了8吨级。
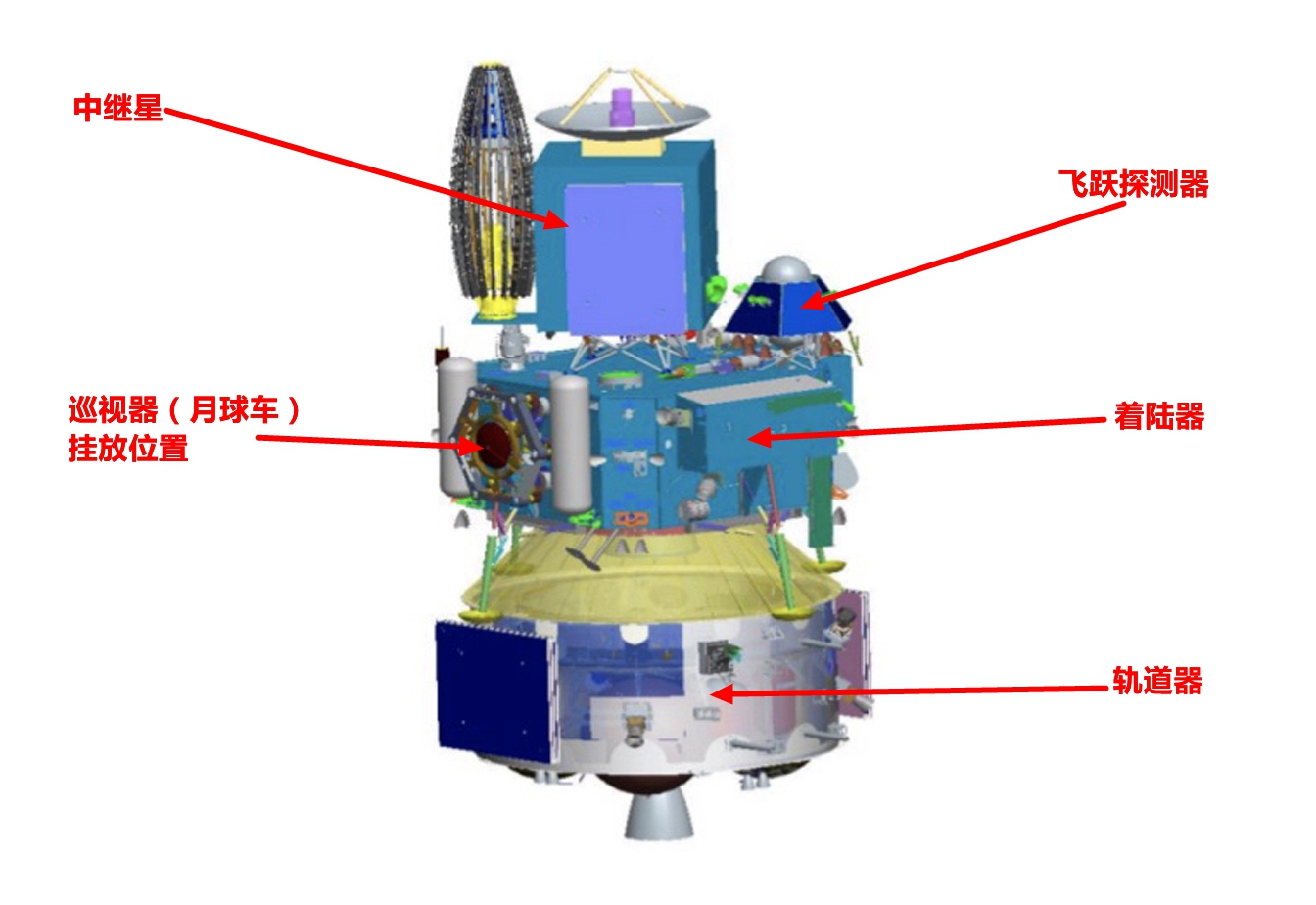
嫦娥七号的早期设计方案
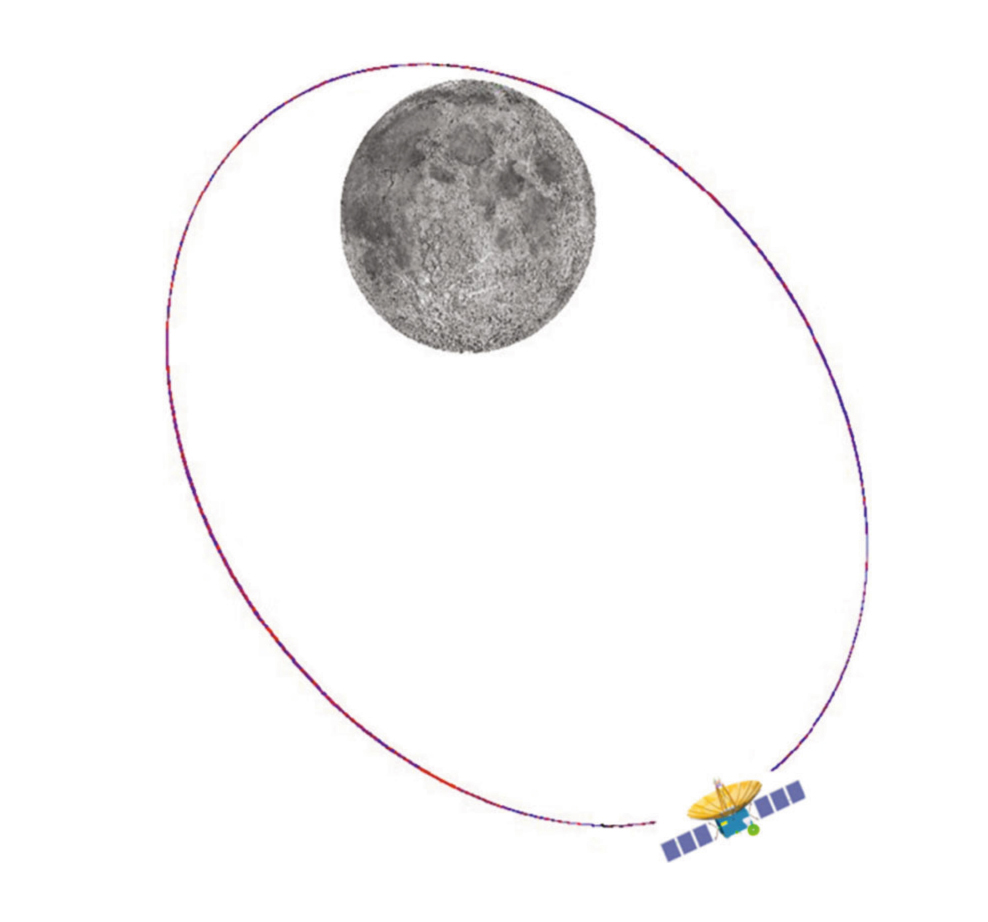
由于旨在实施第二次月球采样返回任务的嫦娥六号同样是旗舰级探月项目,它要执行的是月球背面采样返回任务,需要中继卫星支持,虽然目前我们还有运行于地月拉格朗日L2点拟周期轨道的“鹊桥号中继卫星”可用,但这颗卫星已经处于超期服役状态,我们不能将嫦娥六号如此重要的旗舰级任务的成败寄希望于一颗随时可能寿终正寝的鹊桥号中继卫星身上,因此嫦娥六号需要新的中继卫星。
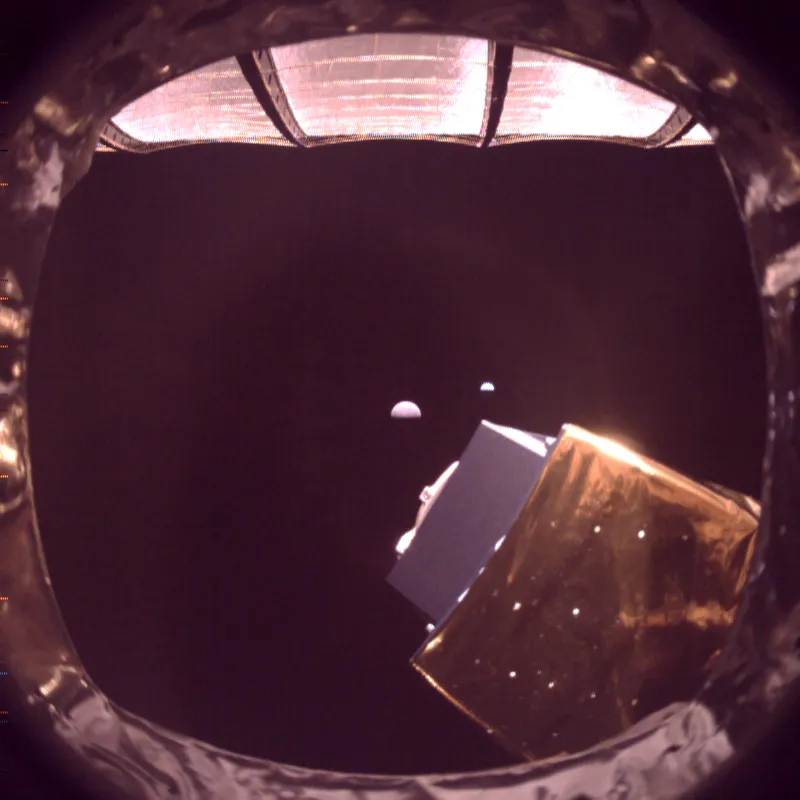
鹊桥中继星视角里的地月系,该中继星已经超期服役。
嫦娥六号又是嫦娥五号的备份探测器,早在嫦娥五号任务时期,嫦娥六号的大部分组件都已经生产完毕,嫦娥五号原本就已经推迟多年,发射时间本就较晚的嫦娥六号也着实不能等待太长时间,而嫦娥七号距离发射之期还有段时间要等,这就有了让嫦娥七号的中继卫星分离出来单独发射的需求。
原本中继卫星随嫦娥七号一道发射就不是最佳选择,因为中继卫星运行轨道与嫦娥七号探测器本体运行轨道不同,双方在轨道上要相互迁就,为了将中继卫星送达工作轨道,嫦娥七号的轨道器就要消耗更多燃料,这就会削弱轨道器的工作寿命。另外,中继星还占据着嫦娥七号着陆器上方的空间资源。
中继星随嫦娥七号一道发射的早期设计方案
如果中继星分离出来单独发射,轨道器既不用额外消耗燃料,也解放了着陆器上方的空间资源,如此一来,飞跃探测器就可以做得更大,能力更强。
还有一点,分离出来单独发射的中继星还可以接替已经超期服役的鹊桥号中继卫星,持续为嫦娥四号服务。
基于上述种种原因,嫦娥七号的中继星就成了独立发射的鹊桥二号中继卫星。
鹊桥二号中继卫星可同时为10个月球探测器提供中继通信服务
话说,当初为什么要让中继星随嫦娥七号一道发射,最现实的原因就是为了省钱,毕竟单独发射要额外消耗一枚火箭。
去掉中继卫星后,嫦娥七号就成了由4个探测器组成的多器联合的探测器,发射质量仍将是8吨级,多余出来的重量资源可以造更大的飞跃探测器,轨道器也可以装载更多的燃料,从而拥有更强的月球轨道机动能力。
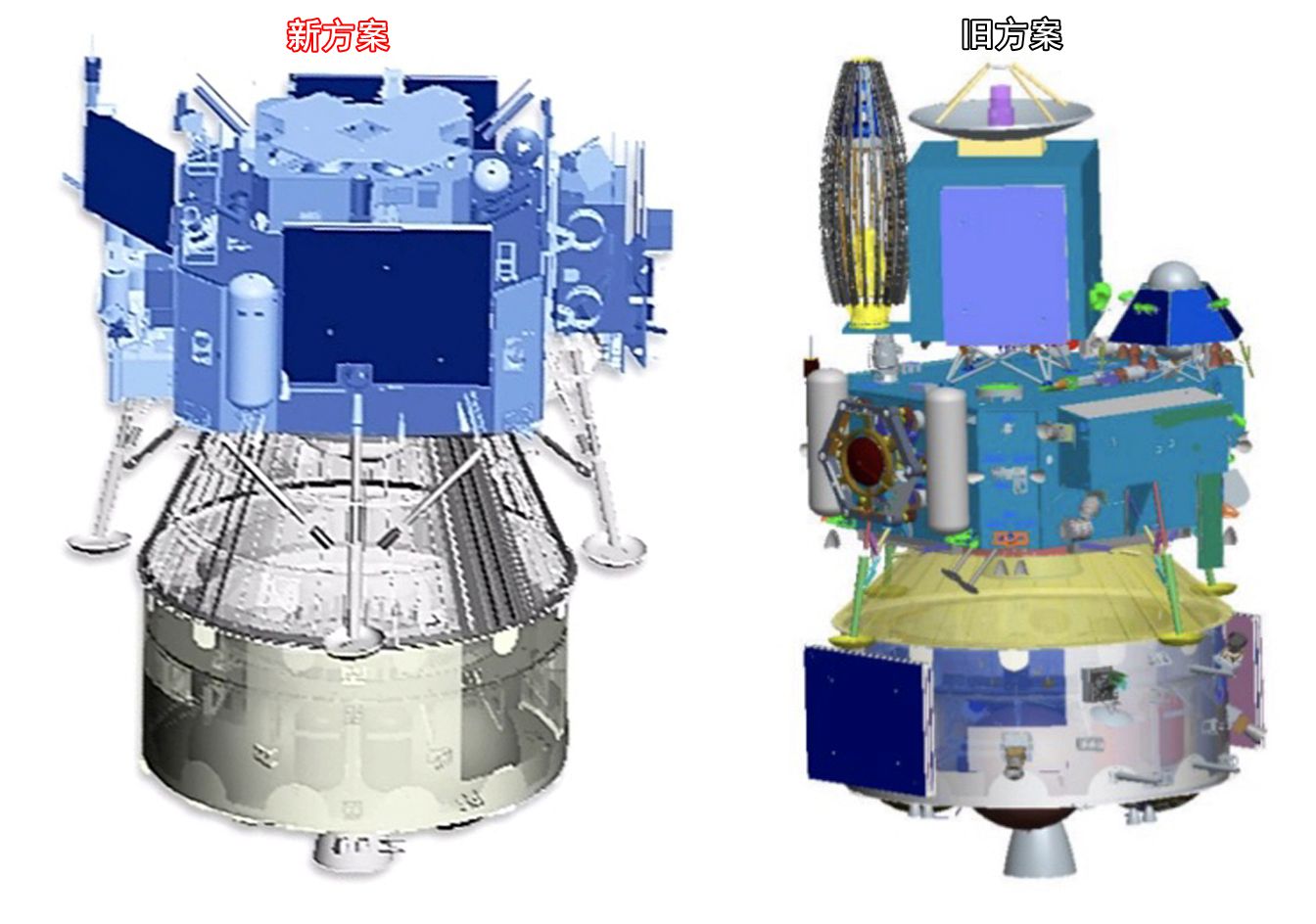
嫦娥七号新旧方案对比
嫦娥七号的首选着陆点位于月球南极沙克尔顿撞击坑附近,坐标是88.8°S,123.4°E,这里是真正的月球南极区域。
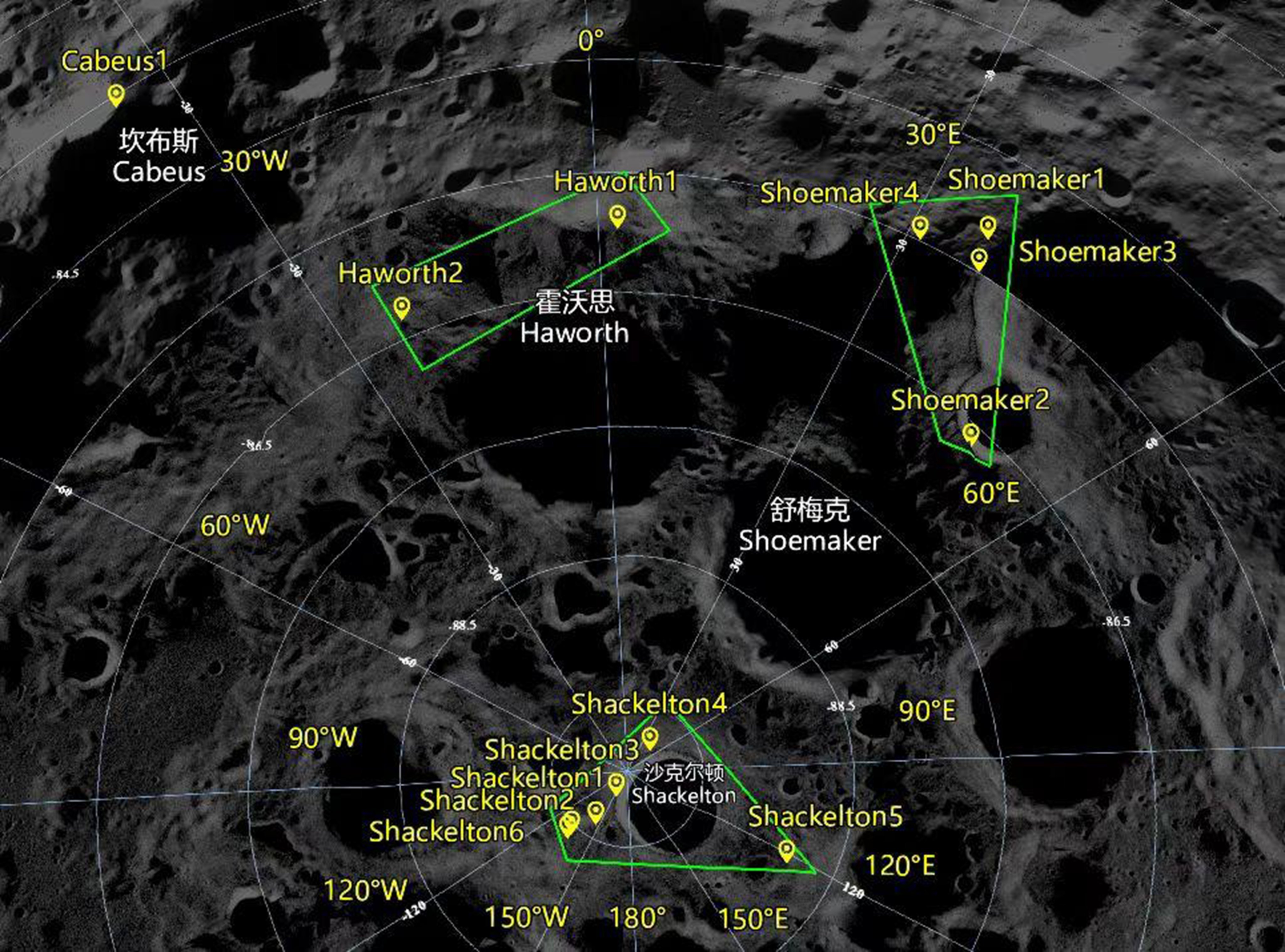
图中“Shcakelton5”标注点就是嫦娥七号首选着陆点
印度也曾宣称他们的月船三号登陆的是月球南极区域,但我们来看看它的着陆坐标,是69.367°S, 32.348°E,根据白道面与黄道面夹角计算,月球极区纬度是南北纬86°以上区域,而月船三号连70°S都没有突破,其着陆点距离月球南极圈还有着几百公里的距离,就这还还敢妄称登陆月球南极?
再看嫦娥七号的首选着陆点,那是实实在在的落在了月球南极极圈以内。
登陆月球南极需要解决两大难题,一个是测控通信难,月球极区大部分时间对地球不可见,需要中继卫星支持,这个问题将由运行于月球大椭圆倾斜冻结轨道的鹊桥二号解决,该中继卫星可提供每天8小时连续中继通信支持。最难的还是要征服月球极区的复杂地形。
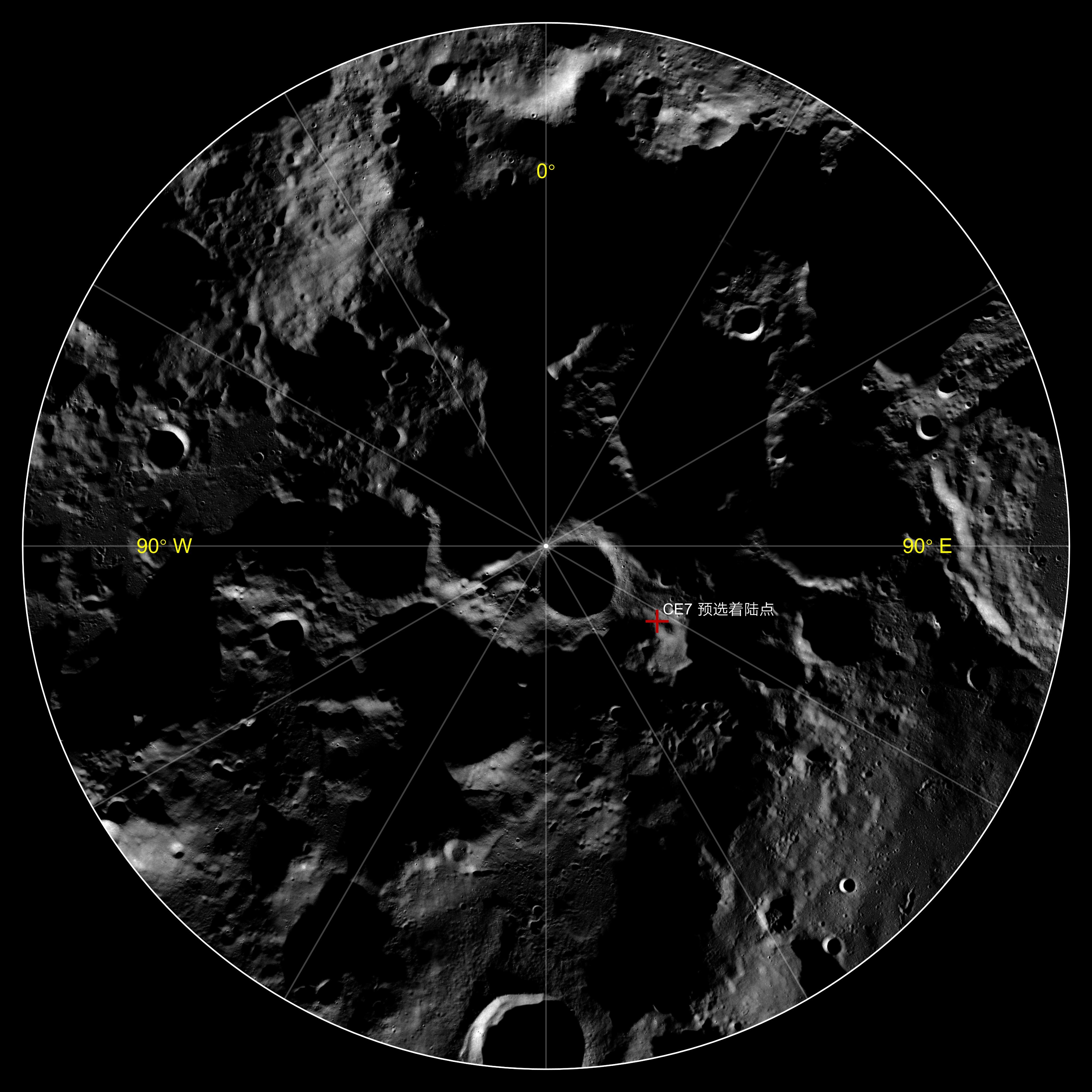
嫦娥二号拍摄的月球南极区域,图中有标注嫦娥七号首选着陆点。
月球南极不仅撞击坑多,而且许多撞击坑还是永久阴影区,相较于其它月面大幅缩减了可供选择的着陆区,同时,月面坡度很大,平均坡度可达9.9°,这已经高于嫦娥系列着陆器坡度不大于8°的要求。另外,月球极区光照角度极低,一般不高于1.54°,有光照与无光照连续交替,光影变化很快,这就要求着陆器在克服复杂崎岖地形的同时,要准时准点地降落,否则,如果在无光照环境下着陆,探测器的能源供给将面临严峻挑战。
虽然着陆区坡度较大,但其实并没有超过嫦娥系列着陆器可适应的极限坡度,比如嫦娥五号,虽然着陆坡度尽量选择不大于8°,但据公开报道可知,嫦娥五号上升器已经考虑到了25°的极限坡度。
最为考验的还是定时定点的高精度着陆,根据任务要求,嫦娥七号将具备百米级的高精度着陆能力。

以往嫦娥系列着陆器虽然有着100%的高成功率,但并不是真正意义上的指哪落哪的高精度着陆,它是划定一个较为宽大的着陆区,解决的是安全着陆的问题,通常是着陆器进入环月轨道后再具体选择符合轨道约束条件的着陆区。
比如嫦娥三号着陆点偏差约600米,嫦娥四号着陆点偏差也是公里级,嫦娥五号的着陆点偏差是2.33公里。

嫦娥七号则可以在从地球出发之前就指定极小范围的着陆区,就是因为它具备了高精度着陆能力,基于百米级高精度着陆能力计算,嫦娥七号的着陆精度相较于嫦娥五号暴增了约23倍。

由着陆器、月球车、飞跃探测器组成的“嫦娥七号着陆器组合体”
之所以能够有如此高的着陆精度,是因为嫦娥七号着陆器在着陆环节增配了“图像匹配功能”,这是一种基于地形相对导航的控制方案,通过机载存储的陆标图像与着陆过程实时拍摄的图像进行比对,进而精确控制减速发动机工作,使着陆器沿着正确的轨道飞向着陆区。.
这个方法其实半个世纪前的阿波罗登月计划也曾用过,所不同的是,阿波罗登月舱的陆标识别是宇航员人工识别,这才使得阿波罗登月舱具备了高精度着陆能力,比如阿波罗12号就曾降落在距离勘测者三号着陆器仅163米的位置。
当然了嫦娥七号的高精度着陆任务难度更高,其登陆的是光影变化极快的月球南极,机载存储的陆标图像需要用到与着陆时刻相同光照条件的图像,而目前人类获得的各类月球极区图像均无法满足嫦娥七号的着陆需求,因此嫦娥七号在进入绕月轨道后,需要使用轨道器搭载的高分辨率相机对月球南极进行高分成像,完成数据装订后再进行登月。
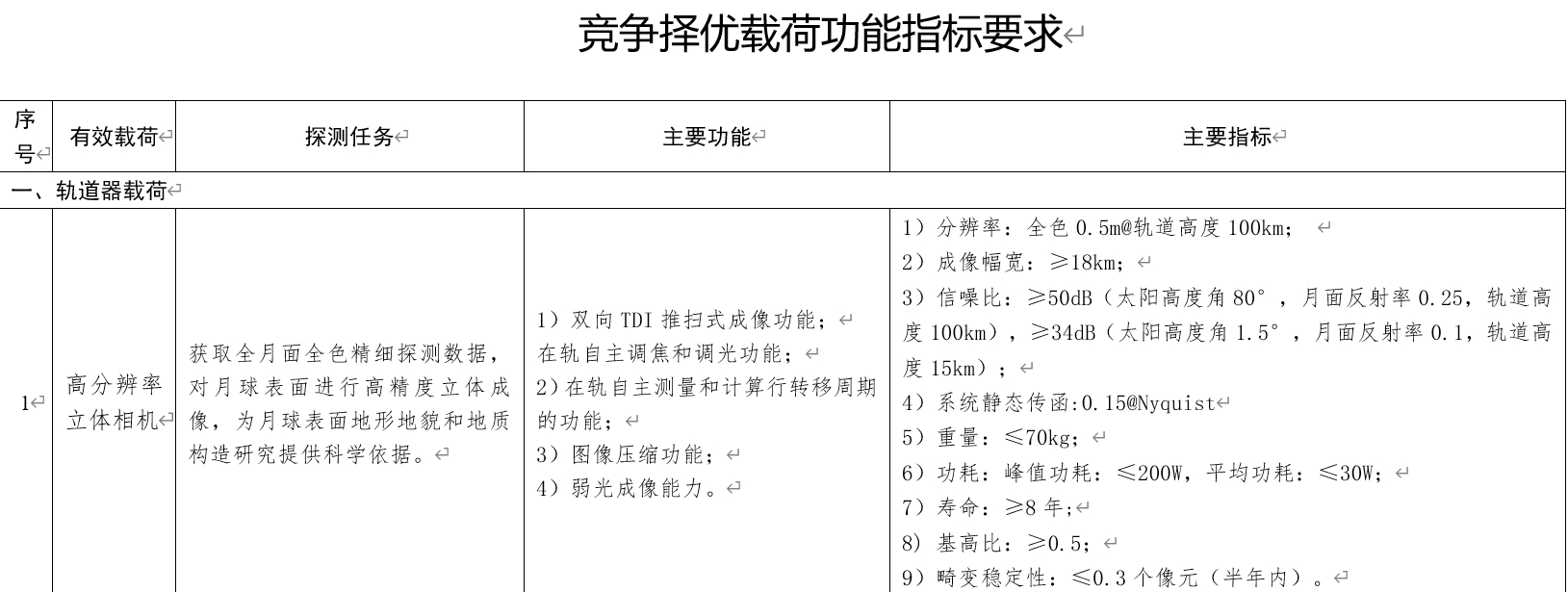
嫦娥七号配置的高分辨率立体相机
未来,随着由我国主导的国际月面科研站的建设任务铺开,我们还将具备基于无线电信标导航的高精度着陆能力,届时就不需要如此繁琐的着陆环节。当然了,嫦娥七号突破的基于图像匹配的地形相对导航技术也是在月面其它陌生区域实现高精度着陆的刚需技术。
近年来,有不少探测器都扬言要登陆月球南极区域,但真正有实力付诸实践的越是少之又少,比如美国今年接下来计划发射的4个探测器,只有一个毒蛇号月球车计划登陆的地点在月球南极极圈以内,该月球车也是最有可能先于嫦娥七号拿下首登月球南极区域纪录的探测器。

毒蛇号月球车
毒蛇号月球车是NASA的旗舰级无人探测项目,但这个探测器也是一拖再拖,其原计划2023年发射,目前已经推迟了一年,即便如此,该项目仍然面临严峻挑战,项目经理丹·安德鲁斯表示,由于大流行时期的停滞,以及技术和设计问题,供应链面临挑战,比如连接器问题,还有设计缺陷,甚至还有异物碎片问题,这些问题阻碍了探测器的可靠性提升。
由此看来,毒蛇号月球车仍将面临再次推迟发射的风险。
飞跃探测器月面上空飞行效果图
高精度着陆只是嫦娥七号的众多技术亮点之一,关于它的精彩故事还有很多,比如设计寿命长达8年拥有十八般武艺的轨道器,能在月面反复起飞、爬行探测、钻取探测的飞跃探测器、着陆器携带的基于弹丸轰击的侵彻式勘察器、新一代月球车……限于篇幅这次就讲到这里,来日方长有机会再讲。