本周三,印度空间研究组织在社交平台先后公布了两张月船三号探测器维克拉姆着陆器的月面照,照片由着陆器释放的普拉冈号月球车导航相机拍摄。
可以看到,着陆器在画面中的位置有点偏上,这是因为普拉冈号月球车没有相机桅杆,相机安装高度较低导致。

普拉冈号月球车的导航相机安装位置有多低,看下面这张图就知道了:

普拉冈号月球车驶离着陆器的地面测试(蓝框内便是月球车导航相机)
在公布第二张着陆器月面照时,任务团队特意附上了此次登月任务的着陆坐标:69.373°S,32.319°E:

这个坐标再次证明,月船三号此次登陆的位置并不是月球南极区域,因为其纬度没有突破月球南极极圈纬度86°S,甚至连70°S都没能逾越。
月船三号之所以无法去真正的月球南极区域,主要还是因为测控通信瓶颈,虽然有月船二号轨道器可以作为中继星使用,但由于其运行轨道低,过顶时间太短,并不足以支持月船三号在月球南极区域的高效探测。
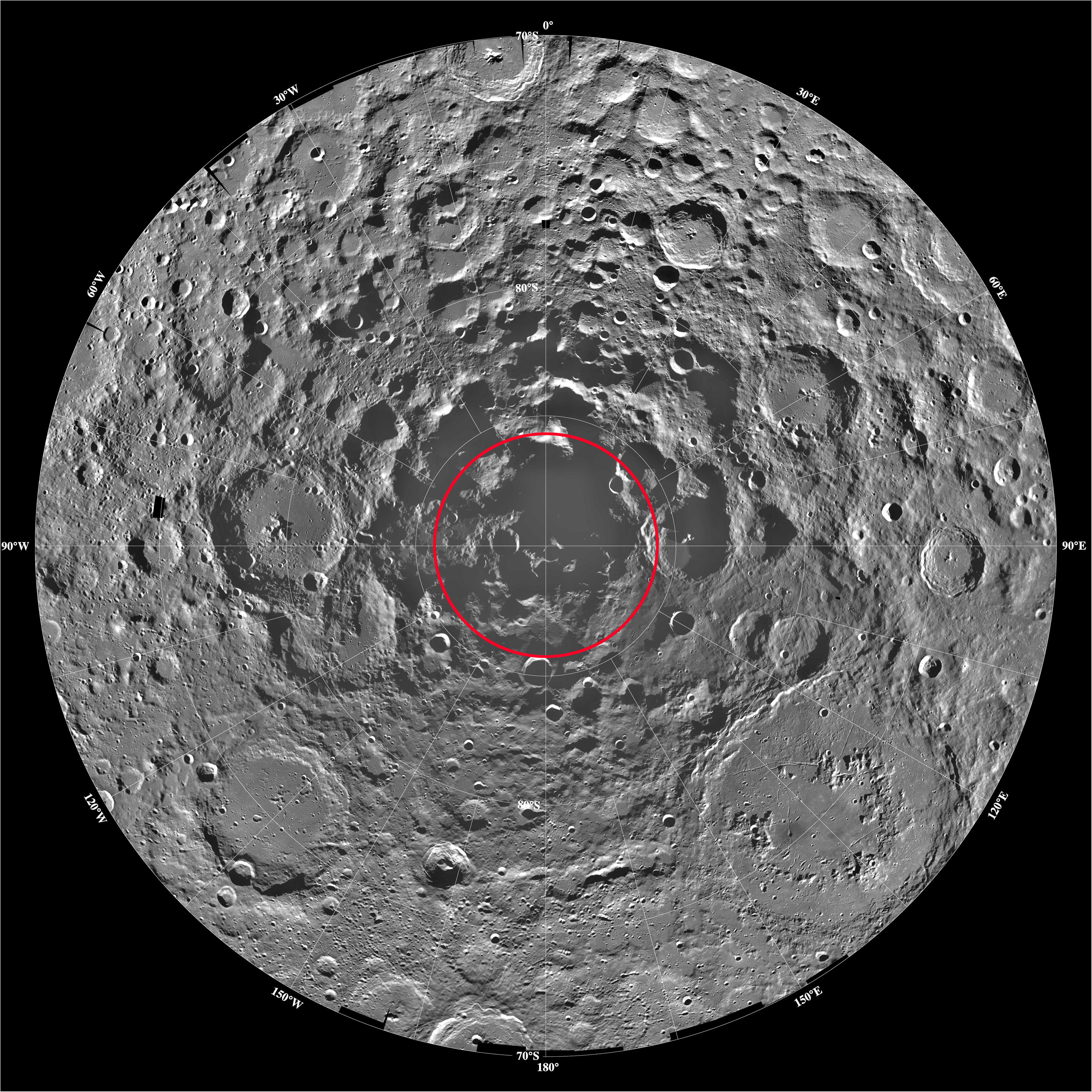
86°S以南区域才是月球南极(红圈内),月船三号的落月坐标点并不在此图中。
比起大家千呼万唤的月船三号着陆器月面照片而言,价值更大的还是任务团队在照片中附上的着陆点坐标,这个坐标点除了说明其登陆位置不是月球南极区域,也证明月船三号此次登月任务打破并刷新了一项世界纪录,这个纪录就是:迄今为止,人类无人着陆器最高登月精度。
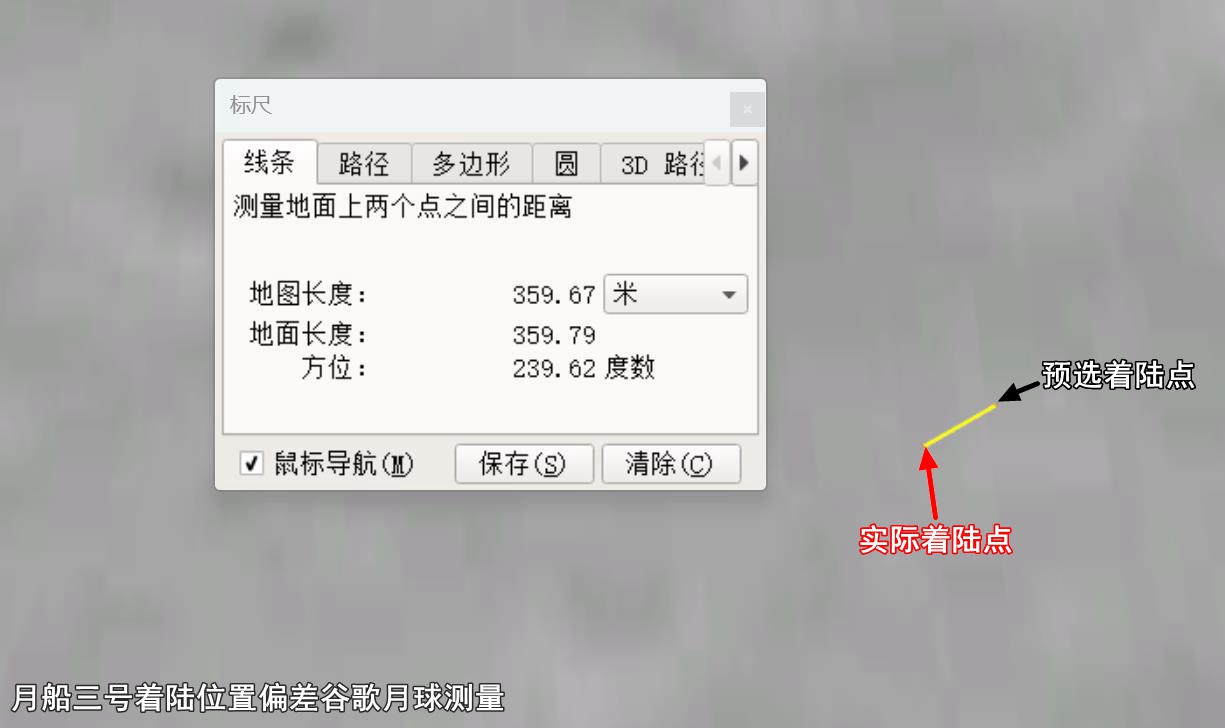
月船三号在登月任务开始前,地面人员选择的着陆点坐标是69.367°S, 32.348°E,其与“实际着陆点”之间的偏差距离仅有约360米。
在月船三号登月以前,人类无人着陆器最高登月精度是由嫦娥系列着陆器创造:
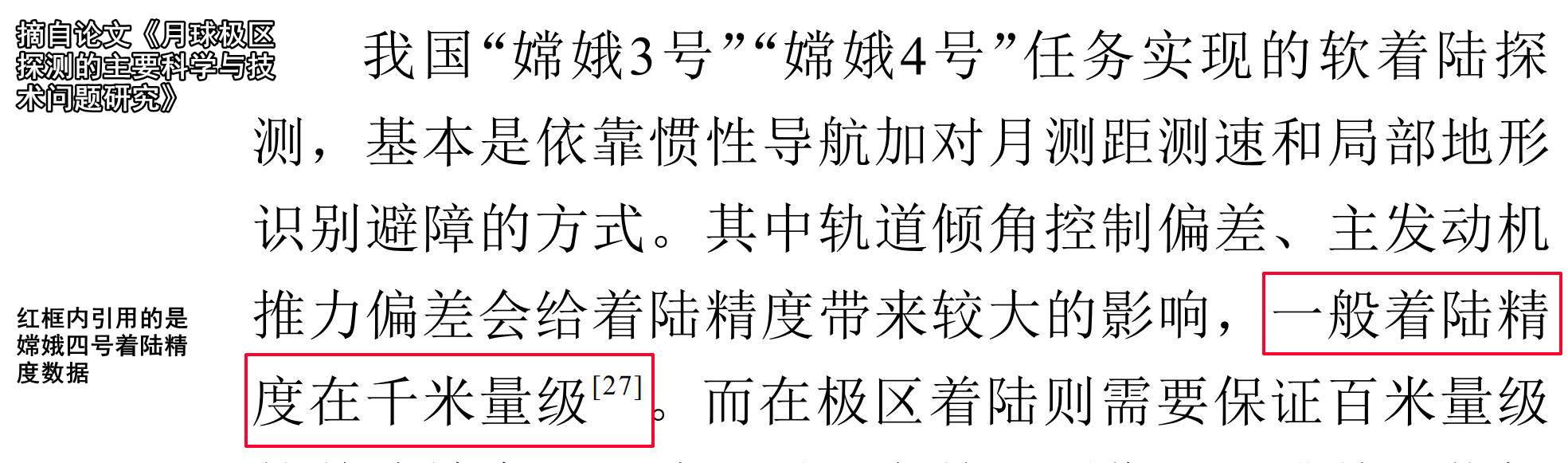
嫦娥五号着陆点偏差是2.33公里,嫦娥四号着陆点偏差是千米量级,嫦娥三号着陆点偏差约600米。

嫦娥五号着陆点相较于地面选点的位置偏差
嫦娥四号着陆点相较于地面选点的位置偏差

嫦娥三号着陆点相较于地面选点的位置偏差
三次嫦娥系列着陆器登月任务中,最高落点精度是由嫦娥三号创造。需要注意的是,这里的着陆点偏差指的是,地面选择着陆点与实际着陆点之间的偏差。
除此之外,还有两个偏差数据经常被引用,就是导航误差、相对着陆器自主选择安全着陆点偏差。
导航误差指的是,着陆器开始登月下降前的预测着陆点与实际着陆点之间的偏差。
相对着陆器自主选择的安全着陆点偏差指的是,着陆器在距离月面百米高度时基于机动避障需要,由激光三维成像敏感器选择的安全着陆点与实际着陆点之间的偏差。

嫦娥三号着陆器
不论是导航误差数据,还是相对着陆器自主选择安全着陆点偏差,都并非由地面选定的唯一着陆点,而是处于动态变化的着陆点。
真正的指哪落哪,显然是定点着陆。
尤其是未来,以嫦娥七号为代表的新一轮月球探测任务大部分都将聚焦月球南极区域,在那里太阳高度角很低,连续光照区范围狭小,且陨石坑密集分布,陨石坑坑壁也更为陡峭,需要通过高分辨率月面照片来选定着陆点,并通过新技术排除一切不利因素,瞄准选定的着陆点登陆。
当然,也允许在一定范围内由探测器自主选择最终的安全着陆点,但这个范围一般不会很大,通常不能超过100米,否则就可能落在无光照的阴影区,或陨石坑内,直接影响登月成败。

靠近月球南极极点的沙克尔顿陨石坑,阳照区与阴影区交错分布。
在嫦娥系列着陆器之前,人类无人探测器的登月偏差通常都是几十公里至几公里,所以说,在月船三号以前,人类无人着陆器登月精度是由嫦娥三号保持,但目前这一纪录将暂时让位于月船三号。
为什么月船三号可以创造360米的登月精度纪录?
嫦娥系列着陆器的登月精度控制主要是通过精确的轨道控制加以实现,这就像是射箭一样,当箭离手的那一刻,基本就决定了射靶精度。
比如嫦娥四号为了登陆月面地形崎岖的冯·卡门陨石坑,需要尽可能消除轨道残差,所以嫦娥四号不像嫦娥三号那样,后者进入绕月轨道仅一星期后就实施了登月任务,而嫦娥四号则是绕月飞行二十多天之后才开始登月,这二十多天就是用来消除轨道残差,以实现定时定点着陆,但这里的定点着陆只是相对于面积仍然较大的冯·卡门陨石坑(直径约90公里)而言。

嫦娥系列着陆器相较于月船三号着陆位置偏差较大的原因,主要是因为后者应用了地形相对导航技术(图像匹配),使得它可以预报更为准确的落点偏差,并加以修正。
月船三号曾在距离月面70公里处使用着陆器位置检测相机对月面成像,它会将成像图像与机载预储存图像进行匹配,进而解算出着陆器的精确空间位置,然后就可以精确预报落点偏差,并通过轨道调整加以修正,进入登月任务后,月船三号着陆器又在距离月面800多米处悬停,再次进行图像匹配,确认是否处于预选着陆区上空,两次图像匹配促成了月船三号较高的落点精度。

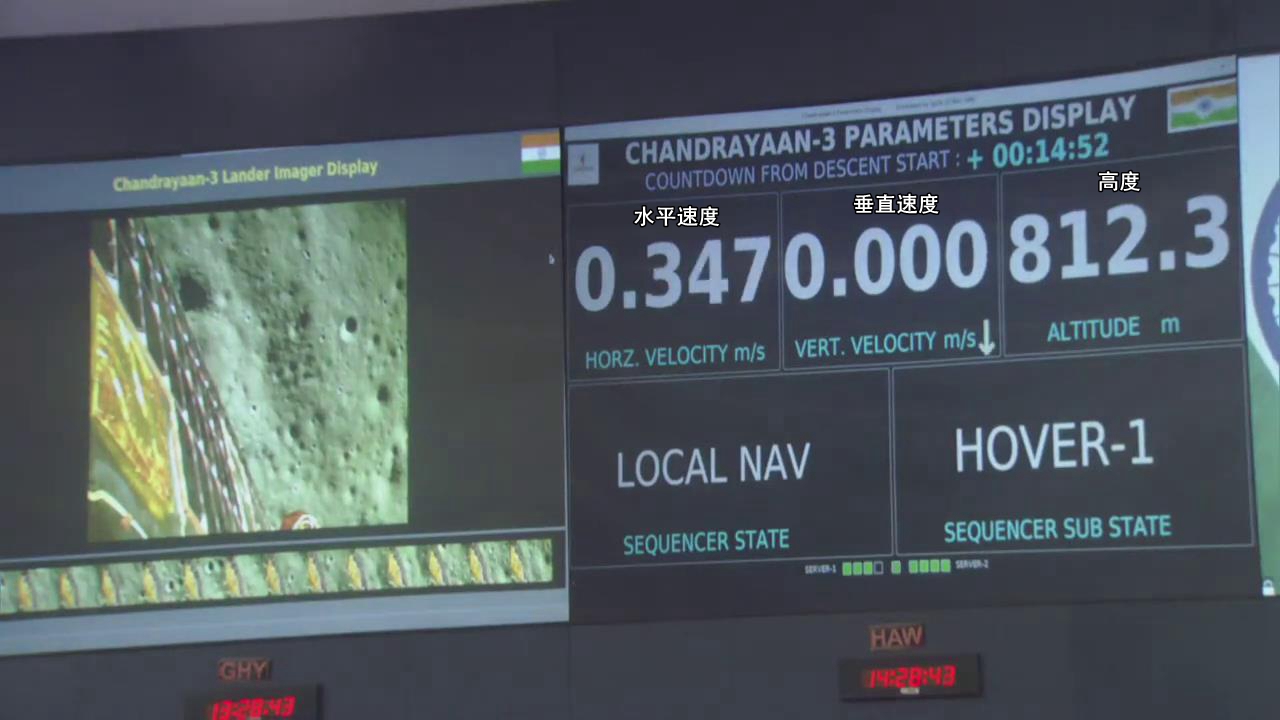
月船三号距离月面约812米时垂直速度降为零,第一次悬停,后续还有150米高度第二次悬停。
前文也说了,要登陆月球南极区域,着陆位置偏差需控制在100米以内,而月船三号此次登月偏差是360米,所以我才说,这个世界纪录只能暂时让位于月船三号,因为两三年后的嫦娥七号将王者归来。
月船三号只能算是初步应用了地形相对导航技术,还没有实现高水平的应用,它只能实现在登月前和登月过程中进行两次图像匹配,只能算是“准定点着陆”,或者说是“初步具备了定点着陆能力”。
真正的高水平应用是,基于图像匹配,不断预报落点偏差,并在动力减速段就可以通过变推力发动机进行推力调节,以实现下降轨迹在较大范围内的修正,从而实现更高精度的落点控制,嫦娥七号就将具备这样的能力,因为它所要登陆的区域是真正的月球南极区域。

高水平的定点着陆是在主减速段可以根据落点预报误差主动修正轨迹,印度月船三号没有这个能力。
至于月船三号是不可能有这样的能力,一个决定性因素就是它没有深度节流大范围变推的变推力发动机,其着陆器配置的4台800N变推力发动机只能在80%至100%推力区间实现推力变化,由于不是专门设计的变推力发动机,推力调节的误差也更大。

月船三号维克拉姆着陆器的4台800N发动机
反观嫦娥系列着陆器则天然具有适应定点着陆的平台性能,比如其配置的7500N变推力发动机,可以在16%至110%推力区间实现大范围推力的连续变化。
7500N变推力发动机
虽然月船三号登月精度的世界纪录最多也就只能保持两三年时间,甚至两三年也保持不了,因为在这两三年期间还会有更多他国着陆器也将应用基于地形相对导航的定点着陆技术。
但是,我们也不能否认印度航天的努力,他们在非常有限的预算框架内,抓住了主要矛盾,这个主要矛盾就是登月工程能力的掌握,并将大部分资源都放在了解决主要矛盾上。
比如月球车、着陆器的一些载荷他们是能省就省,甚至着陆器连台全景相机都没有配置。

月船三号维克拉姆着陆器

印度航天即将发射的日地拉格朗日L1点太阳观测卫星
如果没有我们,同样白手起家的印度航天在世界范围内也的确算得上是出类拔萃,探月、探火、载人航天他们也都在做,甚至他们今年还要往日地拉格朗日L1点发射一个太阳观测卫星,而我们的“羲和二号”日地拉格朗日L5点太阳观测卫星还处于预研阶段,对于他们的努力与成绩我们即便不赞美,也尽量要以“实事求是”的方法观去评判。