10月11日晚间 ,千觉机器人官方公众号发布新闻稿称,已完成数千万元人民币天使轮融资。天使轮领投方为高瓴创投(GL Ventures),璞跃中国(Plug and Play China)、交大菡源基金等投资方跟投。资金将用于产品研发、商业拓展及人才招募,加速公司的成长步伐。
传感器专家网
https://www.sensorexpert.com.cn
专注于传感器技术领域,致力于对全球前沿市场动态、技术趋势与产品选型进行专业垂直的服务,是国内领先的传感器产品查询与媒体信息服务平台。基于传感器产品与技术,对广大电子制造从业者与传感器制造者提供精准的匹配与对接
新闻稿介绍,千觉机器人是一家多模态触觉感知传感器公司,于2024年5月刚刚成立,总部位于上海,专注于研发面向机器人精细操作的多模态触觉感知与智能技术。
包括千觉机器人在内,短短一个月内高瓴资本已经投了3家具身智能企业——9月底高瓴创投分别对人形机器人公司星海图、机器人伺服电机公司富兴机电等完成了出资。值得一提的是,著名游戏厂商米哈游也跨界投资了星海图。
高瓴资本创始人张磊被誉为中国资本市场的“巴菲特”。毕业于美国耶鲁大学硕士的张磊,曾担任纽约证券交易所首任中国首席代表。张磊和他创办的高瓴资本几乎投下了大半个中国商业版图。腾讯、京东、百度、滴滴出行、美团、宁德时代、药明康德、卫龙食品,这些耳熟能详的公司背后,都有高瓴资本的身影。
为什么千觉机器人能获得高瓴的青睐?
或许与千觉机器人创始人马道林的履历有关。
据天眼查资料显示,马道林持有千觉机器人52.5%的股份,是实际控制人。

马道林被业内认为是目前触觉感知领域技术能力最为突出的科学家之一。马道林于2009年毕业于北京大学理论与应用力学专业,并于2015年取得北京大学博士学位。2016年,他进入MIT Mcube 实验室从事博士后研究,随后一直致力于机器人操作及触觉感知领域的前沿研究。
事实上,在视触觉领域,全球顶尖人才主要来自于MIT研发Gelsight/Gelslim的两个实验室,而马道林是其中为数不多的回国创业者。

▲马道林
2021年,马道林加入上海交通大学船舶海洋与建筑工程学院担任长聘教轨副教授,并创建了操作感知与智能实验室。
在触觉感知领域的研究中,马道林在全球范围内首次提出了“依靠触觉和接触来构建空间感知”的机器人精细化操作新路径,2021年,他的研究成果《基于分布式触觉测量和相对运动跟踪的外部接触感知》(Extrinsic Contact Sensing with Relative-Motion Tracking from Distributed Tactile Measurements)在机器人领域最具影响力的国际会议ICRA中获得了大会最高荣誉,斩获2021 ICRA最佳会议论文奖。

ICRA是学术界公认的机器人与自动化领域的顶级盛会,全称IEEE International Conference on Robotics and Automation。自1984年开始举办,每年一次,会议开设了最佳论文奖、最佳学生论文奖,以及自动化、人机交互、多机器人系统、机器人视觉等子领域最佳论文奖等 12 个奖项。
对于该论文,ICRA评委会给出了高度赞誉:
“The paper makes a notable contribution to the important and re-emerging field of tactile perception by solving the problem of contact localization between an unknown object held by an imprecise grasp and the unknown environment with which it is in contact. This paper represents an excellent theory-to-practice exercise as the novel proposal of using extrinsic tactile array data to infer contact is verified with a new tactile sensor and real robotic manipulation in a simplified, but realistic environment. The authors also provide a robust and honest discussion of results, both positive and negative, for reader evaluation.”(该论文通过解决不精确抓取的未知物体与其接触的未知环境之间的接触定位问题,为触觉感知这一重要且重新出现的领域做出了显着贡献。本文代表了一次出色的理论到实践的实践,因为使用外在触觉阵列数据来推断接触的新颖提议已通过新的触觉传感器和在简化但现实的环境中的真实机器人操作进行了验证。作者还对结果进行了有力而真诚的讨论,包括正面和负面的,供读者评估。)
以下为国外媒体对该论文的解读:
作为三维接触力场重建的关键学者,在触觉感知领域,马道林首次实现了对被抓取物体基于触觉的高精度运动跟踪,并基于运动跟踪的能力,创新性地提出了“外部接触感知”理论框架,打开了触觉感知的新模态,使机器人在操作物体时能够依靠触觉同步感知“力”和“运动”两大核心要素,为智能机器人进一步在灵巧操作中精确控制接触行为铺平了道路。
随着人形机器人产业布局与发展的提速,触觉感知正在成为人形机器人企业角逐的关键技术。针对传统触觉传感器仅能感受压力分布以及空间分辨率不足的问题,千觉机器人自主研发的触觉传感器可提供包括高分辨率三维力觉、动觉、滑觉等在内的多模态触觉感知信息,为新一代人形机器人与物理环境自主交互提供了全新的触觉感知能力,帮助机器人突破灵巧操作的瓶颈。目前,千觉机器人相关产品包括高分辨率多模态触觉传感器、触觉感知与控制智能化模组等。
什么是触觉传感器?
根据Tesla Bot Update 视频,一代机器人灵巧手具有“自适应性(Adaptive grasp)”和“非反向驱动能力(Non-backdrivable fingers)”,可以做到能做到收拾杯盘等复杂活动、分拣乐高等;二代机器人灵巧手的仍保持11个自由度,但是运动的速度和抓取性能大幅提升,指尖中阵列触觉传感器的使用是重要增量,可以做到精准力控并双指捏起鸡蛋。

二代灵巧手拿起、传递、释放鸡蛋的精准力控过程,来源:Tesla Optimus Gen 2 发布视频
根据去年12月特斯拉在YouTube公布的视频,二代灵巧手指尖配有触觉传感器,机器人先用左手的大拇指和食指抓取鸡蛋,之后传递给右手,右手的食指和拇指接到鸡蛋后将鸡蛋放到托盘上,其中的亮点包括:①精准力控:依靠触觉传感器反馈,力控恰到好处,双指捏起但不捏碎鸡蛋;②软硬件协同升级:机器人“大脑”知道何时加力、何时减力,并指导灵巧手进行操作,执行装置可以精准完成大脑下达的命令并连贯完成动作。
触觉传感器,是Optimus Gen 2 精准力控的核心器件,它是人形机器人仅次于视觉的重要信息源。与视觉不同,触觉本身有很强的敏感能力,可直接测量对象和环境的多种性质特征,因此触觉不仅仅是视觉的一种补充,触觉的主要任务是为获取对象与环境信息和为完成某种作业任务而对机器人与对象、环境相互作用时的一系列物理特征量进行检测或感知。
广义的触觉包括触觉、压觉、力觉、滑觉、冷热觉等,它能感知机器人与环境的交互情况,以及所接触目标的各种物理属性,如位置、形状、柔软度、文理、颜色、刚度等。触觉传感器本质上是将接触面形状、压力、摩擦力、温度等信息进行感知识别和转换的传感器,其组成部分包括电极、敏感材料和导电材料等。按照敏感元件原理,触觉传感器可分为压电式、压阻式、电容式、摩擦电式、电感式、光纤式等,其中压电式、压阻式、电容式、摩擦电触觉传感器应用较为广泛。
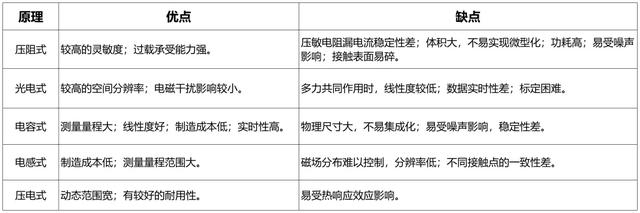
五类不同原理的触觉传感器的对比分析
本节主要探讨的是当下触觉传感器两种主要的技术路线:MEMS、柔性触觉传感器。
1、MEMS压力阵列传感器:
1)区分几个概念
MEMS(Micro-Electro-Mechanical System)是一个广泛的技术领域,是一种微型而精密的机械系统,它将微型机构、微型传感器、微型执行器以及信号处理和控制电路等集成于一块或多块芯片上,产品尺寸一般都在 3mm×3mm×1.5mm。MEMS技术结合了微电子技术和微机械加工技术,具有体积小、功耗低、集成度高、成本低和效能高等特点。
MEMS传感器是采用微电子和微机械加工技术制造出来的新型传感器,是MEMS技术中的一种具体应用,专门用于感知和测量各种物理量。MEMS传感器能够感知并测量各种物理量,如温度、湿度、光照强度、压力、加速度等,并将这些物理量转化为电信号进行处理。与传统的传感器相比,MEMS传感器具有体积小、重量轻、成本低、功耗低、可靠性高、易于集成和实现智能化等优点。
MEMS压力阵列传感器则是MEMS传感器的一个子类,专注于压力测量,并具有阵列式结构。与普通MEMS压力传感器相比,MEMS压力阵列传感器通常包含多个压力传感单元,这些单元以阵列的形式排列,能够同时测量多个点的压力变化。这种设计使得MEMS压力阵列传感器在需要高空间分辨率和压力分布测量的应用场景中具有显著优势。
2)基于MEMS技术的优势,大部分常用的触觉传感器或多或少地应用MEMS技术。前述五类不同的触觉传感器中,压阻式触觉传感器为目前的主流选择,其灵敏度高、分辨率高、技术相对成熟且成本较低,其中MEMS 压阻式传感器为主要的应用趋势。与传统的传感器相比,MEMS传感器具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化的特点。同时,微米量级的特征尺寸使得它可以完成某些传统机械传感器所不能实现的功能。
2、柔性触觉传感器(电子皮肤):
柔性触觉传感器是利用柔性材料的物理特性,将外部的力学量转换为电信息,从而实现对触觉感知的传感器产品。柔性触觉传感器又称为“电子皮肤”,能够实现与环境接触力、温度、湿度、震动、材质、软硬等特性的检测,是机器人直接感知环境作用的重要传感器。传统的触觉传感器以各种刚性材料为敏感元件,存在笨重和硬脆的缺点;柔性触觉传感器则具备类似于人类皮肤的柔韧性,可以适应任意载体形状,更利于测量物体表面受力信息、感知目标物体性质特征,具有研发和产业化价值,目前正处于研发和小批量应用阶段。

机器人多类传感器和柔性电子皮肤,来源《Energy autonomous electronic skin》Carlos García Núñez
按照转换信号原理的不同,柔性触觉传感器可以分为压阻式(电阻式)、电容式、电感式、压电式、光电式等,其中电容式、压阻式柔性传感器应用较多。

电子皮肤的四种转换机制,来源:宋爱国《机器人触觉传感器发展概述》
柔性压阻式传感器以器件结构简单、灵敏度高、响应快、制造成本低、稳定性好等优点被认为是下一代柔性压力传感器的理想选择。劣势是体积大,不易实现微型化;功耗高,接触表面易碎;易受噪声影响。
柔性触觉传感器主要由基底材料、电极材料、功能层材料构成。基底材料是柔性触觉传感器的基础,是决定传感器弹性形变性能的关键因素。电极材料主要用于传输电信号。功能层材料则是传感器的核心部分,能够将外部的力、温度、湿度等物理量转化为电信号。
基底材料:决定传感器弹性性能的关键因素。基底材料起着支撑和保护传感器的作用,要求它具有良好的柔韧性、耐腐蚀性、绝缘性以及温度稳定性等。常用的柔性基底材料有 PET、PI、PDMS、Ecoflex、NR、TPU 等。电极材料:电信号传输。传统的电极一般为金属材料,其本身不具有柔性,多采用减薄金属膜层厚度或设计特殊结构等方法赋予其柔性,这将极大地提高成本且制备工艺复杂。目前,液态金属和导电水凝胶的发展为其提供了新思路。功能层材料:柔性触觉传感器的核心部分。将外部的力、温度、湿度等物理量转化为电信号。具有优异力电特性的功能层材料是决定柔性触觉传感器性能的关键,多采用金属基材料、碳基材料及导电橡胶等。柔性触觉传感器高端产能被外国占据,市场格局较为集中。根据QYReaearch数据,全球柔性触觉传感器市场主要被海外企业占据,全球排名TOP5的厂商主要包括Novasentis、Tekscan、Japan Display Inc. (JDI)、Baumer、Fraba,合计占有大约57.1%的市场份额;国内企业主要包括钛深科技、柯力传感、汉威科技等。

全球触觉传感器代表企业产品及应用,来源公开资料整理
本文部分资料来自:
机器人大讲堂《热点|ICRA 2021最佳论文 | 机器人“搭乐高”?上交大马道林提出“外部接触感知”理论,开拓机器人精细化操作新路径》
投资界《高瓴,刚刚投了三个团队》
焉知人形机器人《一文熟悉人形机器人常用的四类感知传感器:视觉、力/力矩、触觉、IMU》