最近诺贝尔物理学奖公布可以说史无前例的将AI人工智能算法提高到了新的高度。为什么说史无前例?近年来诺奖物理学要么关注宏观宇宙物理要么着眼于微观量子物理。这是首次将眼光聚焦于软件算法,可见由Chat GPT大模型和智能驾驶兴起AI应用的火热程度。那么目前深度学习算法在智能驾驶上的主流问题和挑战是什么呢?随着小星通过一些专利和论文科普了解一下吧。

2024年诺贝尔物理学奖被授予霍普菲尔德(John J. Hopfield)和辛顿(Geoffrey E. Hinton),以表彰他们在人工神经网络用于机器学习方面的基础性发现和发明。辛顿是神经网络之父,他开发的玻尔兹曼机是一种能够通过统计物理学方法进行模拟人脑神经元训练的神经网络,可以有效地对图像进行分类并创造出相应的训练模式。Hopfield网络是霍普菲尔德在1982年提出的一种具有记忆功能的循环神经网络能够模拟人脑存储和回忆的过程。这两位科学家的工作为人工智能的发展奠定了理论基础,使得机器能够模拟人类的学习和记忆过程。

从ChatGPT看AI的突破
2023年ChatGPT的横空出世成为AI领域的一次革命性突破。这种基于Transformer的大模型展示了AI在自然语言处理上的强大能力,标志着AI在理解、推理和生成内容方面达到了一个新的高度。随着AI技术不断进步,其影响力早已扩展至多个行业,尤其是在自动驾驶领域AI的作用变得至关重要。其中Transformer中的注意力机制以Hopfield网络在连续状态下更新规则为基础成为重中之重,而辛顿的研究则通过著名的论文《Reducing the Dimensionality of Data with Neural Networks》和相关BP(逆传播 Back Propagation)算法标志着深度学习的正式复兴。
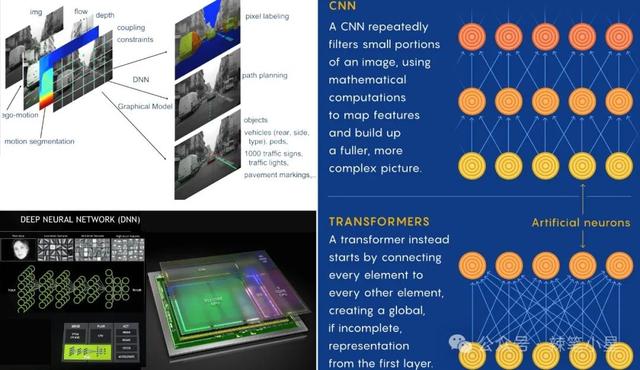
深度学习技术的突破让自动驾驶开始进入实用阶段。通过卷积神经网络(CNN)和深度神经网络(DNN),自动驾驶系统能够实现对道路、行人、车辆的图像识别与处理。从百度到谷歌的自动驾驶出租车商用,AI已成为自动驾驶的核心驱动力。AI不仅帮助自动驾驶系统进行实时感知、路径规划,还能通过大数据驱动的学习不断优化驾驶决策。

在自动驾驶系统中,AI算法的需求主要分为两个层次:车载算法与云端算法。
车载算法:由于实时性与功耗的平衡,车载算法主要用于在车辆行驶过程中处理实时数据,包括环境感知、路径规划和驾驶决策等。
云端算法:两个代表性方向一个是标签自动化,另一个是训练自动化提升数据灵活性。该两点是人工向自动代码演进的关键。这两个典型云端算法平台将为训练机载感知系统提供高质量的数据通用模型。

规划控制决策的挑战
长尾问题的复杂性:长尾问题指的是那些不常见但可能发生的极端情况。深度学习有潜力通过大规模数据训练来识别和处理这些长尾问题,但需要大量的标注数据和计算资源。以奥迪的数据为例一段典型的来自六个摄像头和五个激光雷达自动驾驶数据集就达2.3TB容量。
数据需求与标注困难:深度学习模型的训练需要大量的高质量数据。然而,获取和标注这些数据是一个耗时且昂贵的过程。
实时性与计算资源的限制:自动驾驶系统需要在实时环境中做出快速决策,这对计算资源提出了高要求。虽然车载算力在不断提升,但仍然难以与数据中心的算力相比。

深度学习的潜力与未来方向
尽管面临诸多挑战,深度学习在规划控制决策中的应用潜力巨大。通过以下几个方向的努力,深度学习有望在智能驾驶中发挥更大的作用:
多模态数据融合:结合视觉、雷达、激光雷达等多种传感器数据,深度学习模型可以更全面地理解交通环境,提高决策的准确性。
强化学习与仿真训练:通过强化学习和仿真环境,深度学习模型可以在虚拟环境中进行大量的训练,探索不同的决策策略,减少对真实数据的依赖。这也是为什么在辛顿供职的谷歌推出Waymo自动驾驶出租车商用以后,业界一直称仿真训练平台carcraft和专用测试场地castle是谷歌的两大制胜法宝。
模型压缩与优化:通过模型压缩和优化技术,深度学习模型可以在不显著降低性能的情况下减少计算资源的需求,提高实时性。这里就要提一下特斯拉不断迭代的FSD自动驾驶算法和技术,它的大数据来源就是每一位特斯拉车主,而人工智能训练最好的老师就是人。特斯拉会不停地将自动驾驶算法的规划和判断结果实时与驾驶者的动作做比对。经过无数次迭代以后特斯拉甚至能够做出无限接近与人类的并线插队动作。

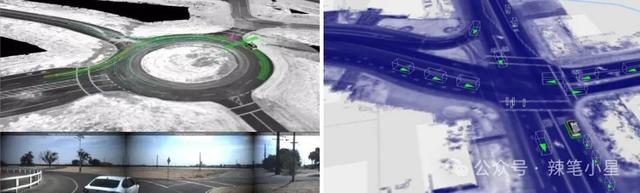
我们通过特斯拉的一些人工智能专利来一窥其自动驾驶提升的秘诀。国际专利WO2024/073737A1用于联合行为规划和预测的人工智能建模技术中提到使用相机捕获的图像数据在周围空间中检测多个代理对象,重点在于行为规划和预测。具体来说根据与层级节点图上与轨迹相关的多个节点确定多个轨迹的轨迹分数美国专利US2023/0057509A1用于自动驾驶的基于视觉的机器学习模型及可调虚拟相机则是自动驾驶基于视觉的机器学习模型可调虚拟相机,聚焦于图像处理和以此为基础的特征提取。从放置在车辆周围的多个图像传感器获取图像,与图像相关的特征通过机器学习模型进行前向传播输出。将特征投影进行聚合并根据虚拟相机确定多障碍物的位置。

AI的算法不仅是自动驾驶发展的关键,更是未来出行和生活的核心因素。随着AI技术的不断进化,车载算法与云端算法将在不同应用场景中相辅相成,共同推动自动驾驶技术的全面成熟。