官阳 | 作者官点 | 文章来源
AI生成 | 头图来源
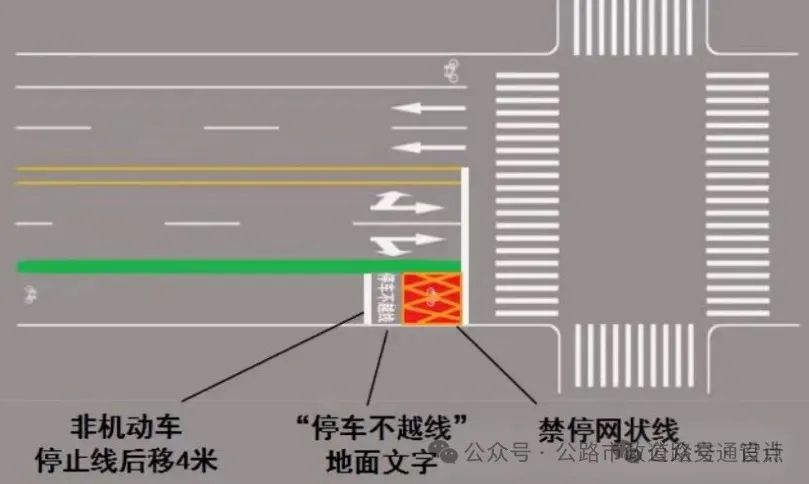
估计很多人看到这个题目吓一跳,以为本号疯了,别紧张,其实我是在说交叉口交通控制的一个技术问题😊我们先看几张图,都是关于非机动车在交叉口待行区的设计导图,对比一下:先看看北京的一个最新做法(图片来自公众号公路市政道路交通设计):


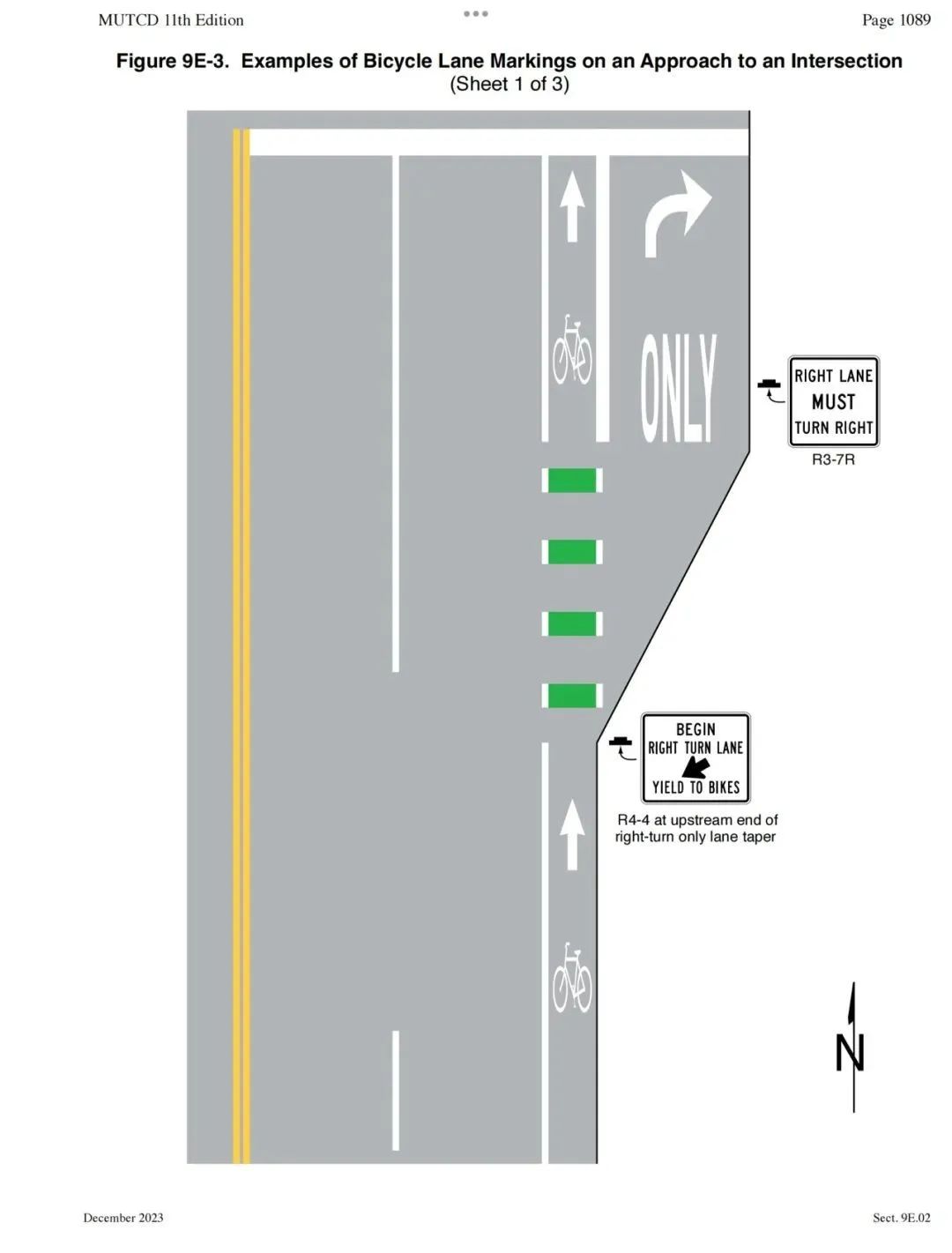
下面是MUTCD的最新设计导图:


这两张来自MUTCD最新的2023版。美国人也在学习中前进,这些设计过去没出现在国家标准里,只在纽约等地方标准里有,最新的修订加入了这部分内容。下面的图是欧洲一些国家的。
先看荷兰的,我之前在本号介绍过,也拿来再看看;荷兰人之前把自行车放在右转弯车道的前面待行,后来搞了机非分离和自行车前提待行与再二次过街;


下图是丹麦的:

下面是英国的:

看出差别了吧?据报道:北京市近期在多个路口试点推出“非机动车停止线后移”措施。这是为优化路口通行秩序和保障交通安全的重要举措。具体做法是“将非机动车停止线后移3至5米,并设置‘停车不越线’提示,设置网状禁停黄线,再不行,还要设置‘泄洪式’移动护栏。” “非机动车停止线后移”是北京市加强交通精细化管理的重要探索。虽然在执行中存在细节上的调整需求,但这一措施在优化通行秩序、提升路口安全方面的价值已经初步显现。随着市民认知的提升和相关配套设施的完善,这一举措有望更好地服务于交通安全和城市治理目标。从上面这些图不难看出,在“世界”范围内,欧美国家设计的自行车待行区,都是尽量提前,放在机动车道的前端,也就是要让自行车的起跑线提前,先于机动车启动,然后机动车才能动,而北京的最新做法,却反其道而行之,让非机动车的起跑线后移了……为啥要逆向而行呢?欧美国家的做法,出于交通流技术理论和基本控制逻辑支撑的一种常规共识:1、自行车提速慢,因为要靠人力逐渐加速,所以要让骑车人在信号灯变绿的时候先启动,然后再让机动车启动,这样慢的和小的先走,快的和大的后走,就可在同样的时间里获得更高的通行量,提高通过效率,缩短信号周期,减少等候时间和排队长度;2、机动车司机能更明确清晰地看到骑行人,就能更谨慎地驾驶,这样安全就更有保障,整体效率自然就会更好。欧美国家对自行车骑行者的要求是,始终要确定司机能看到你,如果无法确定司机能看到你,要骑到道路中间去,让司机意识到你的存在;如果要在车头前横穿,要去看司机的眼睛,只有与司机的目光交流后,才可以在车头前横穿。这些道理看着很简单,为啥北京却反其道而行之呢?虽然我和北京交警有些来往,但这个还真没问过他们,不过以我有限的知识,我觉得这么做是有技术考量的,是在现有条件下的一个没办法的办法,分析如下:先说现象。我们的绝大部份交叉口都有个难题,等红灯的非机动车往往会前冲停在停止线外的路口转角空间里,堵住右转机动车的路径,这时,小车右转弯是在人丛里寻径,这个谈判过程很复杂和危险,特别是有突然钻出来的电动车,很容易出事故,而大车转弯时,内轮差区域里很容易碾压到骑车人;当红灯变绿灯时,等灯的非机动车启动太快,体积小又能钻,所以常常会切段机动车右转弯的路径,形成秩序混乱直行和右转冲突,让机动车右转变得迟缓和危险。所以北京交警想了这么个办法,让非机动车干脆靠后停,迟滞乃至杜绝其前冲的能力和行为。看到这里很多人会问:这个问题欧美国家没有吗?为什么大家处置措施正好相反?是因为国人不守规矩吗?回答是基本没有,这也不都是人的问题,主要还是路和车有问题,本号之前有文章介绍这些内容,比较分散,这里简单汇总一二。这个差别的原因到底是什么?要想明白这个问题,还是老三样:人车路。先说路。就是我们的交叉口的转弯半径太大了,信号灯周期太长了。这导致在路口位置,停止线前方还有很大的一个转角空间是“闲置”的,吸引着有微型交通工具的交通流去填充。非机动车有小快灵的优势,很能钻,人们在路上是习惯争分夺秒的,等红灯时,眼睁睁地看着前面一大块“闲置”空地,红灯时间99秒+,很挑战耐心,很多人会觉得不往前挪挪太浪费时间了,所以很多人就会尽量往前,再往前……本文就不展开细节了,之前的文章多次专门写过我们的路口转弯半径太大的问题,这个问题是我国城市甚至公路的交通工程的大bug,导致了太多的交通控制失败和与世界相左的操作,有兴趣大家自己翻翻前面的文章吧。再说车。我们现在的非机动车道上,其实大部分是机动车在跑,就是我们所说的电动自行车,它与人力驱动的自行车最本质的区别就是运动能力,特别是加速和持续运动能力,远超人力所及(交通流的运动能力是人机非分离的基本依据)。所以在路口上,从零速启动的时候,小快灵的电动自行车的加速性能甚至会优于机动车,它们能快速地抢先冲入路口,所以对北京交警来说,这个停止线后移是在想办法抑制这种杰出的机动运动能力,用停止线后移的办法延迟电动自行车冲入路口阻碍机动车的行为,而不是让这种车快上加快,同时这种后移也为看到绿灯转黄就突然加速的电动车有更大的空间以优化判断,算是一种在非机动车道上的机动车视距优化措施,目的都是维护机非分离的初衷。当然,交通控制是个取舍的过程,这么做,骑真正的自行车(包括必须靠人力驱动的电助力自行车)这时就更吃亏了,毕竟大家启动慢,要排在后面慢慢来了,其实这类“慢慢来”会对路口的清空时间有压力,降低路口效率,这也是为什么我们的信号灯周期越做越长的原因之一。再说说人。电动自行车车因为被定义为非机动车,所以大部分骑者并没有接受过交通规则和安全视距等技术意识训练,缺乏交通安全意识,但却堂而皇之地驾驶着机动车游走在为非机动车流特征设计的空间里,这种现象在欧美国家很少有,因为这些国家的交通安全教育是从小就开始的,而且非常系统和频繁,人们即使不会开车,也要会走路和骑车,这种差异对执法资源的要求形成本质影响,这也是为什么我们有些大路口会安排很多协管员……本号也写过相关介绍文章,这里就不赘述了。怎么办呢?就这样继续“逆行”下去?其实在交叉口并没有千篇一律的做法,要根据交通流特征逐一应对,很多时候,还要考虑现实条件,在很多时候,交通控制措施都是“没办法的办法”,虽然不是长久的最优解,但往往是一时的最优解。只是有些总体原则,应该是有技术共识的,简单说说:1、路口的转弯半径要尽量缩小,因为城市里的右转弯车速不宜超过15公里时;转弯半径一小,很多难题就会减少……2、路口的车道配置要有流量数据,特别是非机动车的数据也需要有;科学的车道配置,还可以大大提高路网通行效率;3、路口的信号配时与车道流量数据要匹配,太长的等候时间将导致排队车辆太多进而引发秩序混乱,一般情况下红灯时间不要超过80秒;4、如果无法分离车道建立二次过街区,减少右转弯与待行非机动车冲突的有效方法是提前换道,让右转弯车辆换到最右侧。总之,如果我们的交叉口能缩小些,转弯半径变小些,信号周期也就能缩短,积压排队的交通流就会减少,再根据流量数据匹配更合理的车道,为电动车建立更科学的定位和专门的管理体系,为有明显运动能力特征差异的交通流建立更科学的行走路径,也许我们就会与“世界”同行了……最后,再看些图示吧: