——交通工程的祛魅及复魅
虽然各国“停”、“让”标志的路权规则及通行要求几乎没有差别,但背后的控制理念却并不完全一致。说成是有两种不同的“停”、“让”标志体系,也未尝不可。

图一 基本相同的“停”、“让”标志
在美国,stop sign是一种常规的交通控制设施;但在英国,Stop Sign的使用却受到了严格的限制。事实上,无论是工程规范还是交通管理,两者都存在明显的差异。
一.截然不同的通视要求
DMRB中的Approach visibility与绿皮书中的Departure sight triangles之间的区别,此前已经讨论过(参阅有关交叉口“引道视距”的一些问题),这里不再重复。下面以澳大利亚为例。
对于“Stop Sign”的使用,澳大利亚同样有严格的限制。AS 1742.2规定,只有在通视三角区的Y值小于规定的时候,才能使用STOP sign,否则就应该用GIVE WAY 。下图中“3m”的值(左侧红框),在支路是干道(arterial road)时取4.5m;不同速度所对应的Y值(左侧蓝框),见下图右侧Table 2.2。

图二 Y值三角形(AS 1742.2)
根据AS 1742.2的规定,只有在通视区小于“Y值三角形”(上图)的情况下,才能使用“停”标志。AASHTO绿皮书的规定则完全不同,要求是在通视区大于“b值三角形”(Departure b值三角形,下图)时,才使用“停”标志。一个“小于”一个“大于”,体现了两种完全不同的理念,而且这个 “b值三角形”本身就比“Y值三角形”更大。

图三 Departure b值三角形(绿皮书)
两者在“让”标志通视区上的最大区别,则是支路上的边长。AS 1742.2对“让”标志通视区的规定,仍然是上述“Y值三角形”,只是要求从“小于”变成了“大于”。这个三角形在支路上的边长是一个固定的值(3m/4.5m)。而在绿皮书中, 只有“停”标志的Departure b值三角形(上图),支路边长a1是固定值;但“让”标志需要同时满足Approach b值三角形(下图),其支路边长和支路的设计速度相关,要比4.5m大得多(下图右侧)。

图四 Approach b值三角形 (绿皮书)
两者在“停”标志上完全相反的规定,以及“让”标志通视区支路边长上的巨大差异,其实是不同管理理念及关注重点的必然结果。
二.不同的管理理念及关注重点
英国TSM(Traffic Signs Manual)认为,只有在驾驶人觉得确实有必要设置STOP sign的时候,他们才会遵从。AS 1742.2的说法则是:在视距受阻并非关键因素的情况下,随意使用STOP sign会影响该标志的公信力,并导致驾驶人不遵守规定。
也就是说,英澳关注的重点,实际上都是STOP sign能否得到遵守。这也是TSM及AS1742.2都把“停”标志的通视条件,设置成“小于”的原因。这种规定有一个附带的结果,就是相对于“让”标志来说,“停”标志的数量非常少。
在“停”标志控制的路口,可以停车之后再做决策,相对简单。而“让”标志需要在行驶过程中进行决策,驾驶负荷更高,而且通视区在支线上的距离越短,决策的时间压力就越大。
美国更关注的是驾驶负荷(Workload)。
绿皮书的Approach“b值三角形”,要远大于AS1742.2的“Y值三角形”。以主线速度60km/h,支线速度40km/h为例,两个三角形的比例如下图所示。“Y值三角形”在支线的边长为3.0m/4.5m(与速度无关),而Approach“b值三角形”的要求则达到了40m(参见图四)。

图五 “让”标志通视区对比
像这样增加支路上的通视时间,确实可以减轻决策压力,进而降低驾驶负荷。但这种规定的后果是:那些因为不满足Approach“b值三角形”不能设“让”,而设置的“停”标志(仍需满足Departure“b值三角形”),通视条件远远超过了AS1742.2中“Y值三角形”所规定的阈值。
从英澳所关注的角度来看,按照这种要求设置的“停”标志,很多都会被驾驶人认为没有必要。其结果是,一些驾驶人在遇到这些STOP sign时,并不会完全停车(full stop),而只是减速通过。这种现象在美国一度确实非常普遍,以至于交通执法中有一个专门的术语,叫做 Rolling stop。
除了教育和宣传之外,美国还为此投入了大量执法资源。很多州都有专门针对Rolling stop的罚则。除现场执法外,有的州还安装了专门的抓拍摄像头(Stop Sign Cameras)。处罚措施包括罚款、扣分,以及将Rolling Stop 记录告知保险公司,致使保险费率增加等。
既然这么麻烦,美国为何不学英、澳呢?
三.控制设施的系统性
美国不但驾照的培训及考试都相对简单,这种体制还有庞大的存量积累,路径依赖导致改变的成本非常高。而且还有很多老人自己开车,不但有90岁还要送老伴去医院的,还有在加油时手抖得连卡都插不进的94岁老人,仍然在自己开车。
在这种情况下,交通管理需要处理的主要矛盾其实是:驾驶人面对复杂场景更容易犯错的现实。Rolling stop可以通过加大执法力度来改善,但驾驶人应对复杂场景的能力,却很难直接提升。
澳大利亚采用的是分级驾照体系(Graduated Licensing System),培训考试都要严格得多。正常获取驾照需要4年。首先要申请学习驾照(Learner's Permit),经理论知识考试合格后,挂L-Plates行驶,必须有一名持有完全驾照(Full License)的监督驾驶人陪同。监督练习满120小时(包括夜间20小时)且至少12个月之后,才能申请临时驾照P1(Provisional License – P1 Stage)。经过危险感知测试(Hazard Perception Test)及实际路考合格,挂Red P-Plates行驶。满12个月之后,才能申请临时驾照P2(Provisional License – P2 Stage),然后挂Green P-Plates行驶12个月,才能申请完全驾照。路考不但包含驾驶技能,还有驾驶习惯(比如是否会定期检查后视镜),以及潜在危险的感知及应对能力等。
因此,澳大利亚的驾驶人能够更好的应对比较复杂的驾驶场景,比如在美国很少采用的环岛(下图左侧)。好处是对控制设施的使用可以更加灵活,比如用标线来定义直行(through)车道。下图右上的示例中,绿色的A车被定义为through,而从东向西,真正在几何意义上直行的B车则被当成“右转”,需要让行。还可以对驾驶人提出更高的要求,比如提前规划转弯(Plan ahead when turning)(下图右下)等。
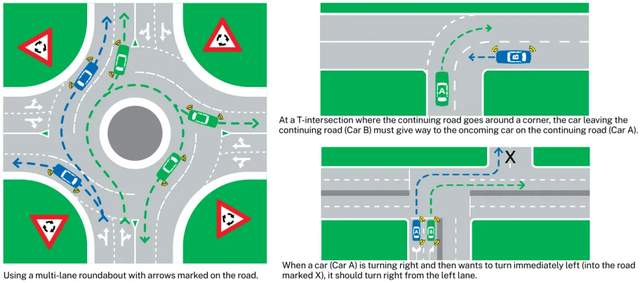
图六 更复杂的场景(NSW Road User Handbook)
由于涉及到“人”因(human factors),相较于那些只与“物”理相关的学科,交通工程的入门其实更难。控制设施与几何设计、交通法规、教育培训体制甚至路径依赖等因素交互影响,构成了一个复杂的系统。很多具体做法都只有在相应的系统中,才能确认其价值。
即使像“停”、“让”标志这种看起来很简单的设施,各国的通行规则完全相同,在“用路人”(road users)的角度也几乎毫无区别。但从交通工程的立场来看,在不同的系统中,“停”、“让”标志的设置依据(warrants)和底层逻辑,都不尽相同。
相同的设施,在不同的系统中可能会有完全不同的考虑。
四.交通工程的祛魅及复魅
目前的交通工程规范体系,经历了两个发展阶段。在90年代之前,老一辈公路人由于资料匮乏,感性认识也不多,对国外的标准规范基本上秉承了谦虚甚至谦卑的态度。但这些前辈在非常困难的情况下,完成了很多开拓性的工作。虽然确实有一些问题没有条件完全搞清楚,但那时候的标准、规范及教科书,基本上都比较靠谱。
90年代之后,高速公路建设突飞猛进,然后就是我们这一代人逐渐接棒。条件好了、信心也随之膨胀,交通工程在此期间经历了一次祛魅。由于控制设施特殊的系统性,以及我们对基本概念和基本原理了解的欠缺,这一次祛魅也间接导致了某种程度的失控。
以控制设施为例。黄色标线的运用实际上有两种不同的体系,一种用于区分道路的行驶方向,另一种是表示“禁止”和“强调”的意思。前者如美国,道路边缘线是 “左黄右白”,行驶方向很容易通过颜色来区分。后者如英国,黄色表示No Waiting 、No Stopping 、Keep Clear等。这两套体系并不兼容。
但在GB5768-1999学习美国,采用黄色标线来分隔对向车道的时候,并没搞清楚“区分行驶方向”这个底层逻辑。其结果是,我们的黄色标线既不能很好的表示“禁止”或者“强调”——因为对向车道分界线全都是黄色;也不能用于区分方向——在单行道或者有中分带的道路,前进方向的左侧车道边缘线标线仍然是白色(参见GB5768.3征求意见稿的一些问题2)。
在几何设计及控制设施的标准和规范中,有很多类似黄色标线这种“兼收并蓄”的东西。以视区为例。交叉口通视区学自苏联,安全交叉停车视距则是照搬Austroads(参见为什么说JTG D20的通视三角区逻辑混乱?),入口汇流鼻通视区是抄的日本(参见汇流鼻通视区)。引道视距则先抄日本后抄Austroads(参见有关交叉口“引道视距”的一些问题)。
时至今日,我们对控制设施这种特殊系统性的认知,仍然严重欠缺。比如我们在GB5768.2-2009引入了“多路同设停车让行标志”的设置方式(即all-way stop),但到现在都没有配套引入“all way”辅助标牌(下图左侧R1-3P),以至于我们其实很难区分是否“多路同设”。以下图左侧为例,从南向北行驶的驾驶人,如何判断东西方向是否也设置了“停”标志?再比如2023年的《公路交通安全设施精细化提升关键技术指南》,引入了灯控路口通视区的要求,但红灯允许右转所要求的通视区,并没有同步引入(参见基于通行规则与路权规则的对比研究)。

图七 缺失的系统性
正是由于控制设施这种特殊的系统性,很多具体规定在先进国家之间并不一致。对这种不一致有两种截然不同的态度。一种是相信这种差异是有原因的,而且借助这些差异,可以更好理解背后的逻辑。另一种则是觉得,既然英国分隔对向车道用白色,而美国用黄色,就说明随便怎么都可以。
交通工程的祛魅,在很大程度上也助长了这种“随便怎么都可以”的想法。2000年之后,除了这种严重缺乏系统性的“兼收并蓄”,还滋生了不少“想当然”的东西。比如出口三角区标志,在GB5768-86中本来正确的设置,从1999版到2009版,被想当然的一步一步修改成了问题重重的双悬臂(参见交通工程专业的不“专业”)。再比如1988版的“道路交通管理条例”中,对向行驶时左转让右转的通行规则,2004年被改成了右转让左转。就这个问题而言,我们目前是在全世界面前特立独行(参见交叉口让行规则的逻辑)。
交通工程(Traffic Engineering)作为一门发展了近百年的学科,在中文里连学科名称都被鸠占鹊巢了。而Traffic Engineering知识普遍匮乏所导致的重“物”理、轻“人”因,也是目前行业很多乱象的重要的原因(参见行业对交通工程的普遍认知及其后果)。
祛魅到今天,常常被当成“怎么样都可以”的交通工程,其实是需要一次“复魅”的。
江苏通云交通发展有限公司 专业从事于交通管理系统、交通安全设施产品的研发、生产、销售与安装。核心产品主要包括:“主动发光标志”、“全点阵交通诱导屏”、“交通诱导信息发布系统”、“路况数据融合分析系统”、“通航净高预警系统”等。
获取完整方案联系作者,联系电话:13801501625。
