报告出品方:国海证券
以下为报告原文节选
------
人形机器人飞速迭代进化
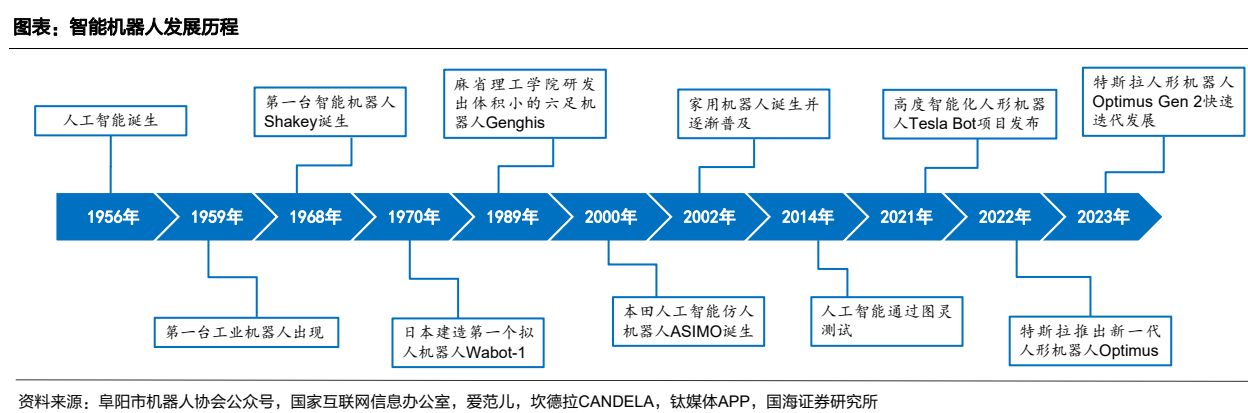
智能机器人发展日益蓬勃
智能机器人,即具有主动性的第一人称智能,本质上是可以与环境交互感知,能自主规划、决策、行动,具有执行能力的机器人。智能机器人的核心目标是能够听到人类语言,然后分解任务,规划子任务,在移动中识别物体,与环境交互,最终完成相应任务。自1968年美国斯坦福研究所公布第一代智能机器人Shakey以来,智能机器人发展日益蓬勃、方兴未艾。
全球机器人市场规模庞大
● 机器人市场规模庞大。根据中国电子学会《中国机器人产业发展报告 (2022年)》指引,预计2022年全球机器人市场规模将达到513亿美元,其中工业机器人市场规模将达到195亿美元,服务机器人达到217亿美元,特种机器人达到101亿美元。
● 全球人形机器人未来市场空间巨大。根据KBV Research数据,2022年全球人形机器人市场规模为14亿美元,到2030年该市场规模预计达到396亿美元,CAGR高达51.86%。

具身通用智能机器人是机器人未来发展方向
● 具身智能被视作人工智能的最终形态。具身智能是指一种基于物理身体进行感知和行动的智能系统,其通过智能体与环境的交互获取信息、理解问题、做出决策并实现行动,从而产生智能行为和适应性。
● 相比一般机器人,人形机器人具有更加复杂的结构、传感、驱动和控制系统。人形机器人是指外观和功能与人相似的智能机器人,比一般机器人具有更加复杂的结构、传感、驱动和控制系统。
● 人形机器人是具身通用人工智能最理想的身体形式。未来的机器人需要真正做到和人一样,通过实现规划决策(大脑)、运动控制(小脑)、主控系统、主干结构及零部件的组合(类似于人的一系列关节和肌肉)达成基于感知到的任务和环境进行自主规划-决策-行动-执行等一系列行为的目标。

Te sl a Bot
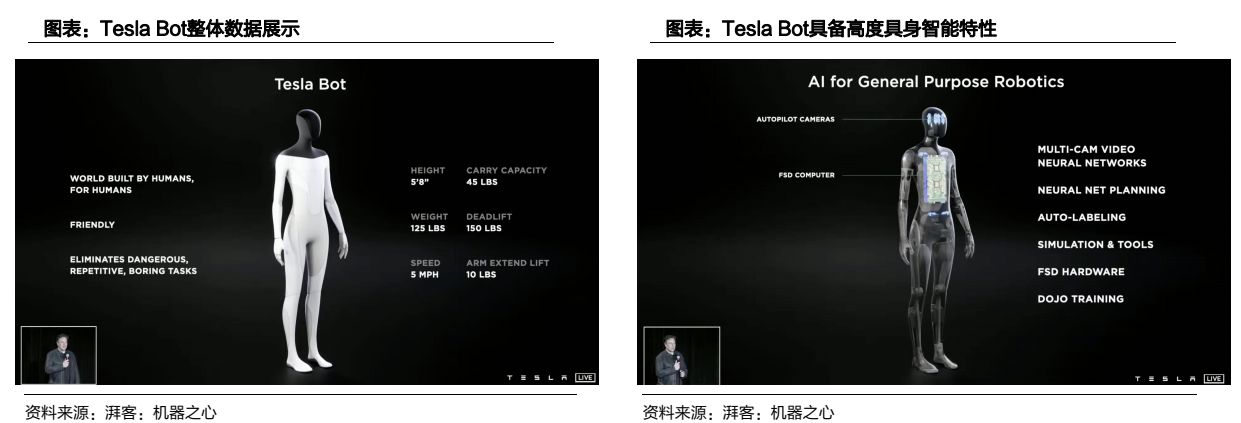
● Tesla Bot横空出世,人形机器人快速更新。2021年8月19日,在特斯拉首届AI Day活动中,马斯克亲自发布了概念机 Tesla Bot。按照马斯克的设想,Tesla Bot将由分布在机器人手臂、颈部、躯干、手掌、腿部的合计40个电机驱动,使用轻质材料构成主体,并拥有如人类一般灵活的双手。马斯克认为,Tesla Bot将会从处理无聊、重复和危险的事情开始,逐步去实现其他更复杂任务。
Optimus
● Optimus迭代进化,有望量产且大幅降低成本。2022年9月30日,特斯拉在Tesla AI Day展示了人形机器人Optimus(擎天柱)的原型机版本,并在展示文档中分享了大量技术细节。马斯克认为Optimus有望在3-5年内实现量产,最终降本至2万美金一台,从而普通家庭亦可购买。
● Optimus具有极高自由度。Optimus全身共有40个关节,其中Optimus 的四肢以及躯干部分合计有28个执行器关节,包括14个旋转执行器关节以及14个线性执行器关节。而Optimus 的一双灵巧手则有12个执行器关节,每只手具备11个自由度,可以进行自适应抓取,且具备反向锁止功能。

● Optimus力度控制能力,感知能力显著提升。2023年5月,特斯拉在其股东大会上发布了擎天柱Optimus 的演示视频,机器人的力度控制更加精准,可以接触但不击碎鸡蛋。机器人的感知能力亦显著提升,可以识别并记忆不同的路况。此外,Optimus 可以由人类输入动作范例,进行端到端的学习。
● 马斯克预计,Optimus的远期需求或达到100亿台。

Optimus Gen 2
● Optimus Gen2智能机器人来袭,手部关节全新升级,力度控制进一步增强。2023年12月,特斯拉发布Optimus Gen2的最新视频。视频显示,Optimus Gen2拥有 AI 大模型的加持,体重比一代减少10kg,步行速度加快30%,身体控制能力增强;手部关节全新升级,活动更加自然。手指部分均搭载触觉传感器,能更精准地抓握细小易碎物品。同时,Optimus Gen2还可以做多个深蹲动作,显示出其平衡能力有所增强。

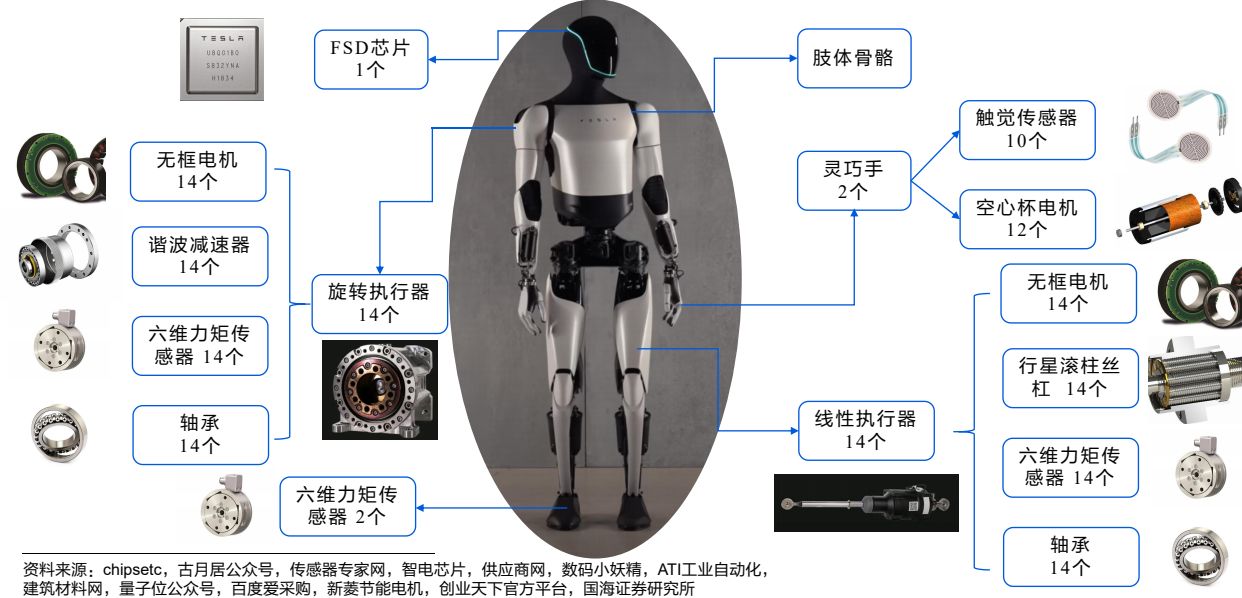
Optimus结构及原材料拆解
人形机器人包含四大核心技术模块
● 人形机器人主要包含四大核心技术模块:环境感知模块、智能AI芯片模块、运动控制模块、操作系统模块,其中前三大技术模块与硬件有关。

Optimus全身具有50个自由度
● Optimus全身有50个自由度,分布在各个身体部位。人形机器人的自由度需要执行结构达成,组成Optimus的14个旋转执行器、14个线性执行器、灵巧手的多个空心杯关节为其带来了50个自由度,使其不同身体部位能够前摆(Pitch)、扭转(Yaw)、侧摆(Roll)运动,同时每只灵巧手的11个自由度让其能够执行更复杂的操作。

Optimus独特的执行器设计与分布

Optimus结构拆解
Optimus成本拆分
● 在Optimus整机的BOM中,FSD芯片及套件、六维力矩传感器、行星滚柱丝杠、谐波减速器、无框电机价值量位列前五,分别占整机价值的比重为27.68%、19.77%、14.30%、11.53%、9.23%。

六维力矩传感器
● 六维力矩传感器是性能最优、力觉信息最全面的力矩传感器,能够同时测量三个轴向力和三个轴向力矩,将力矩的物理变化转换成精确的电信号,满足任何方向上力的检测。
● 六维力矩传感器技术壁垒较高,需解决维间扰乱、矢量解耦算法、动静态标定、对所测力分量敏感的单调性和统一性等问题。
● 六维力矩传感器应用于每个线性执行器和旋转执行器上,使Optimus结构更为简洁,对力的感知和控制效果更好。

六维力矩传感器的核心是硅应变片
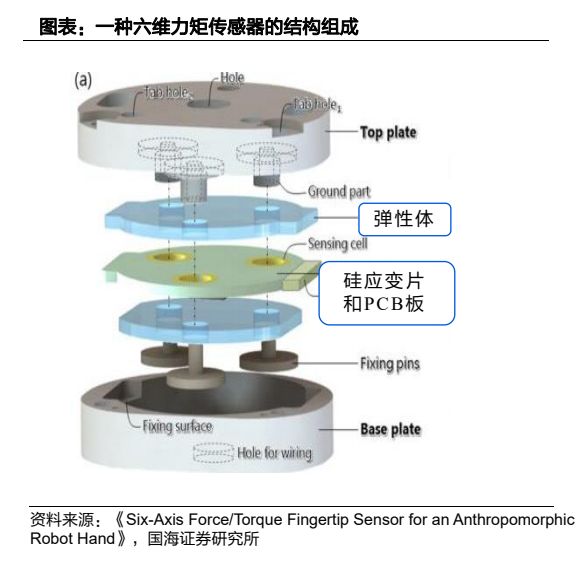
● 六维力矩传感器属于应变片式传感器,其主要组成部分包括弹性体(Elastomer)、硅应变片、PCB板等。弹性体材料包括铝合金、不锈钢等;PCB板的核心是覆铜板,是将电子玻纤布或其它增强材料浸以树脂,一面或双面覆以铜箔并经热压而制成的一种板状材料;这些部分价值较为便宜。
● 硅应变片是传感器的核心,也是其价值的主要组成部分。
硅应变片是将单晶硅切片、研磨、腐蚀压焊引线,最后粘贴在聚酰亚胺的衬底上制成的,其关键是通过测量硅的体积变化带来电阻的变化,采集并计算以后得到力的大小。
● 硅应变片材料成本较低,但导致其价格高昂的原因是对应变精准测量采集的技术和加工工艺。截止2024年2月27日,硅应变片龙头KYOWA 的 KFWB 型号应变片的价格为445.2元/片,而标准130μm的N型单晶硅片仅需2.55元/片。
行星滚柱丝杠
● 行星滚柱丝杠将电机的旋转运动转换为丝杠或螺母的直线运动。行星滚柱丝杠的核心部件包括主丝杠,螺纹滚柱丝杠和螺母。主丝杠的周围,行星环绕般布置了6-12个螺纹滚柱丝杠,使行星滚柱丝杠具有运行速度高、承载能力强、使用寿命长等特性,作为液压系统的替代品更加适用于人形机器人。
● 行星滚柱丝杠具有高技术壁垒,售价高昂。行星滚柱丝杠加工精度要求高,制作工艺繁琐复杂,可以为客户定制产品,选用高材质的钢材能为行星滚柱丝杠的加工精度提供保证,减小摩擦阻力,因此行星滚柱丝杠售价较为昂贵。

行星滚柱丝杠的主要材料是合金钢和轴承钢
● 行星滚柱丝杠的材料中,主丝杠选用的材料为50CrMo4或42CrMo4合金钢,螺母和滚柱选用的材料为GCr15轴承钢。50CrMo4合金钢具有高强度、高硬度和良好的抗疲劳性能,适用于制造需要承受高载荷的零部件;GCr15轴承钢耐磨性、抗接触疲劳强度高,热加工性好,适用于制造高耐磨性、高弹性极限和高接触疲劳强度的机械零件。

谐波减速器
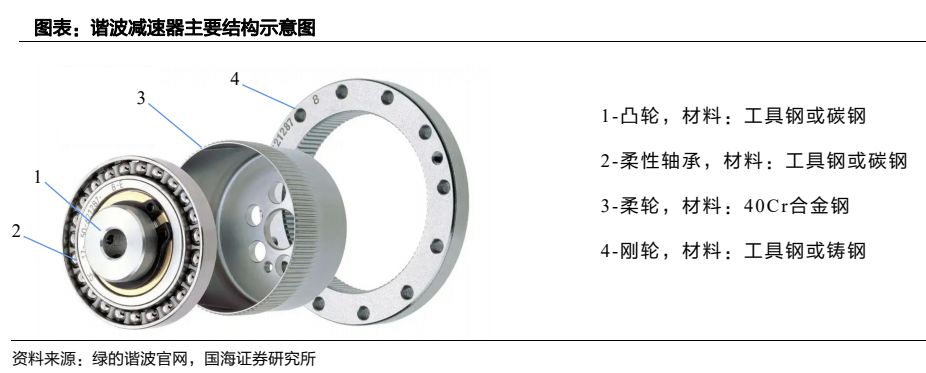
谐波减速器● 谐波减速器是旋转执行器的核心部件。谐波减速器由波发生器、柔轮、刚轮组成,其工作原理是利用波发生器使柔轮产生可控弹性变形,并与刚轮相啮合来传递运动和动力的齿轮传动。
● 谐波减速器具有单极传动比大、体积小、质量小、运动精度高并能在密闭空间和介质辐射的工况下正常工作的优点,使其在机器人小臂、腕部、手部等部位具有较大优势,代表性厂商为日本哈默纳科、国内绿的谐波。

谐波减速器结构拆解
● 谐波减速器的核心技术在于谐波齿形的设计、柔轮的设计和成型工艺、波发生器的加工工艺。这些设计工艺技术难点大,均属于企业的核心机密,而实现柔轮、刚轮、波发生器的优异性能还离不开对材料和材质的高要求,通过选择合适的材料能有效提高各零部件的抗疲劳性能,延长其使用寿命。
● 谐波减速器主要由钢材制成。柔轮材料基本为40Cr合金钢,国外提纯技术较高。刚轮材料国内厂家一般使用工具钢或铸钢,而日本哈默纳科则采用球墨铸铁。波发生器由柔性轴承和凸轮组成,其材质采用工具钢或碳钢。
谐波减速器是人形机器人减速器的优选方案
● 谐波减速器体积小,传动比高,精密度高,适用于负载较轻的精密减速器领域,是人形机器人减速器的优选方案。资料显示,Optimus旋转执行器均采用谐波减速器,应用于肩关节、腕部、腰部、髋部等部位。
● 2025年全球机器人用谐波减速器市场预计达到48.9亿元。近年来,全球机器人产业发展迅速,其产量持续增加;除工业机器人外,人形机器人也逐步进入谐波减速器的下游应用行业。据华经情报网数据,2020年全球机器人用谐波减速器市场规模21亿元,预计2025年市场扩容翻倍,达到48.9亿元。

无框电机:驱动执行器工作的动力来源
● 伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机接收到1个脉冲,就会旋转对应的角度,从而实现位移,能够很精确的控制电机的转动,实现精确的定位。
● 无框电机属于伺服电机的一种,是驱动人形机器人执行器工作的动力来源。无框电机消除了传统电机的铁芯,结构紧凑小巧,可实现更高的功率密度,具有低能耗和低摩擦的特点。

无框电机仅由定子和转子组成
● 无框电机仅由一组定子和转子组成。转子由带永磁体的旋转钢圆环组件构成,直接安装在机器轴上;定子包含有高磁导率磁芯,外面包裹着能产生电磁力的铜绕组,紧凑地安装在机器外壳的主体内。据观研报告网,在上述材料中永磁材料价值量最高,占整体的35%。
● 根据尼得科为机器人关节设计的无框电机产品参数,其转子重量在0.027kg-0.336kg之间,我们估计中等型号的转子中使用钕铁硼永磁材料的量为0.1kg。

空心杯电机:小巧、灵敏、高效
● 空心杯电机属于直流永磁的伺服电机,是一种微特电机(尺寸不超过40mm)。空心杯电动机体积小、高效、低噪音,具有突出的节能特性、灵敏方便的控制特性和稳定的运行特性,技术先进性十分明显。
● 无刷空心杯电机通过驱动器实现电子换向,相比于有刷空心杯电机,因其转速更高、寿命更长适合应用在人形机器人手部。Optimus每只灵巧手上均有6个空心杯电机驱动的空心杯关节,给予灵巧手11个自由度,从而实现更加灵活、精密的操作。

--- 报告摘录结束 更多内容请阅读报告原文 ---
报告合集专题一览 X 由【报告派】定期整理更新
(特别说明:本文来源于公开资料,摘录内容仅供参考,不构成任何投资建议,如需使用请参阅报告原文。)
精选报告来源:报告派科技 / 电子 / 半导体 /
人工智能 | Ai产业 | Ai芯片 | 智能家居 | 智能音箱 | 智能语音 | 智能家电 | 智能照明 | 智能马桶 | 智能终端 | 智能门锁 | 智能手机 | 可穿戴设备 |半导体 | 芯片产业 | 第三代半导体 | 蓝牙 | 晶圆 | 功率半导体 | 5G | GA射频 | IGBT | SIC GA | SIC GAN | 分立器件 | 化合物 | 晶圆 | 封装封测 | 显示器 | LED | OLED | LED封装 | LED芯片 | LED照明 | 柔性折叠屏 | 电子元器件 | 光电子 | 消费电子 | 电子FPC | 电路板 | 集成电路 | 元宇宙 | 区块链 | NFT数字藏品 | 虚拟货币 | 比特币 | 数字货币 | 资产管理 | 保险行业 | 保险科技 | 财产保险 |

成本较马斯克的人形机器人高,还是要降成本下来,不然怎么参与竟争?!