2024年4月20日,以"全域全量"为主题的蔚来智能驾驶发布会在北京举行。蔚来宣布全域领航辅助NOP+城区功能,将于4月30日起,面向蔚来Banyan·榕智能系统用户进行全量推送。
蔚来还宣布推出“智驾分”体系,并设立智能驾驶安全性与可用性衡量标准。蔚来智能驾驶的目标是,到2025年智驾使用时长占比达80%,10倍安全于人驾,推动实现“解放精力、减少事故”。
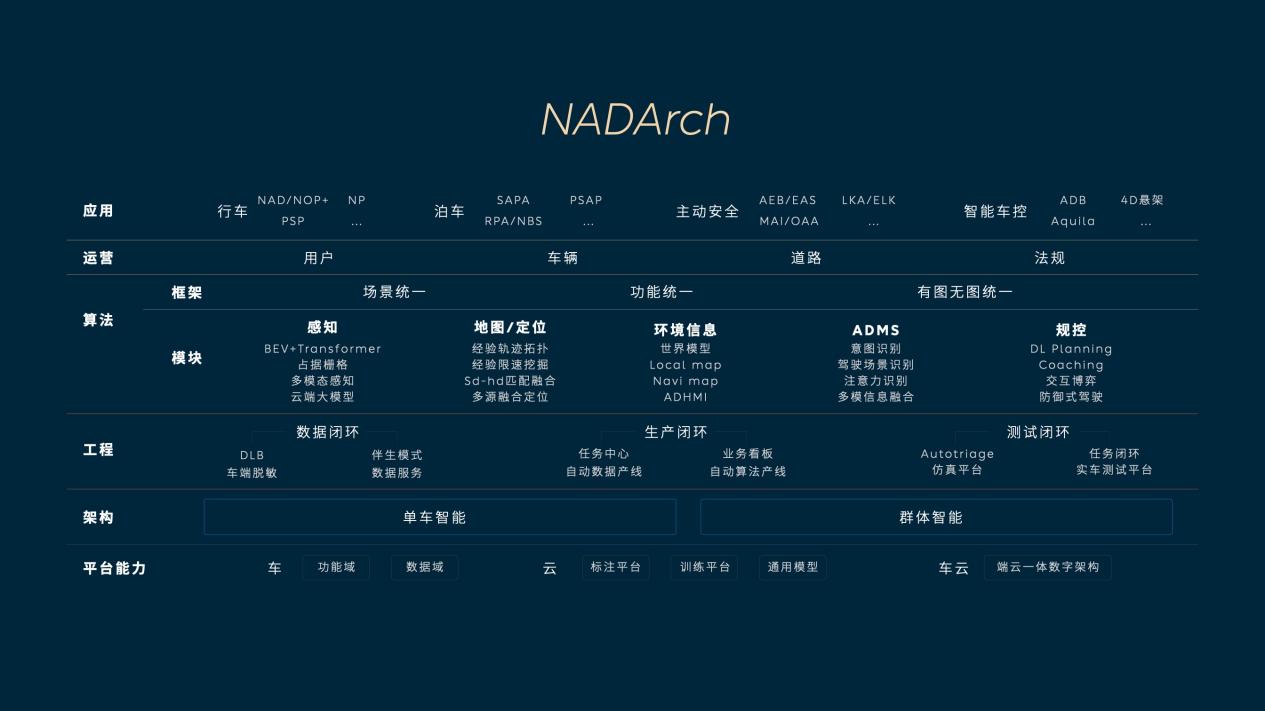
蔚来智能驾驶系统能实现全域应用场景覆盖,通用泛化能力是基础,统一算法架构则是关键。为此,蔚来打造出NADArch智能驾驶架构,该架构包含Lane 2.0感知网络、NADCloudM、NADHVH等先进算法模型应用。Lane 2.0可支持城区场景路口通行的实时感知,NADCloudM可借助云端更强的大模型,提升感知能力,NADHVN可通过全数据驱动的规划网络,使全域领航辅助NOP+拥有更加细腻的交互能力。
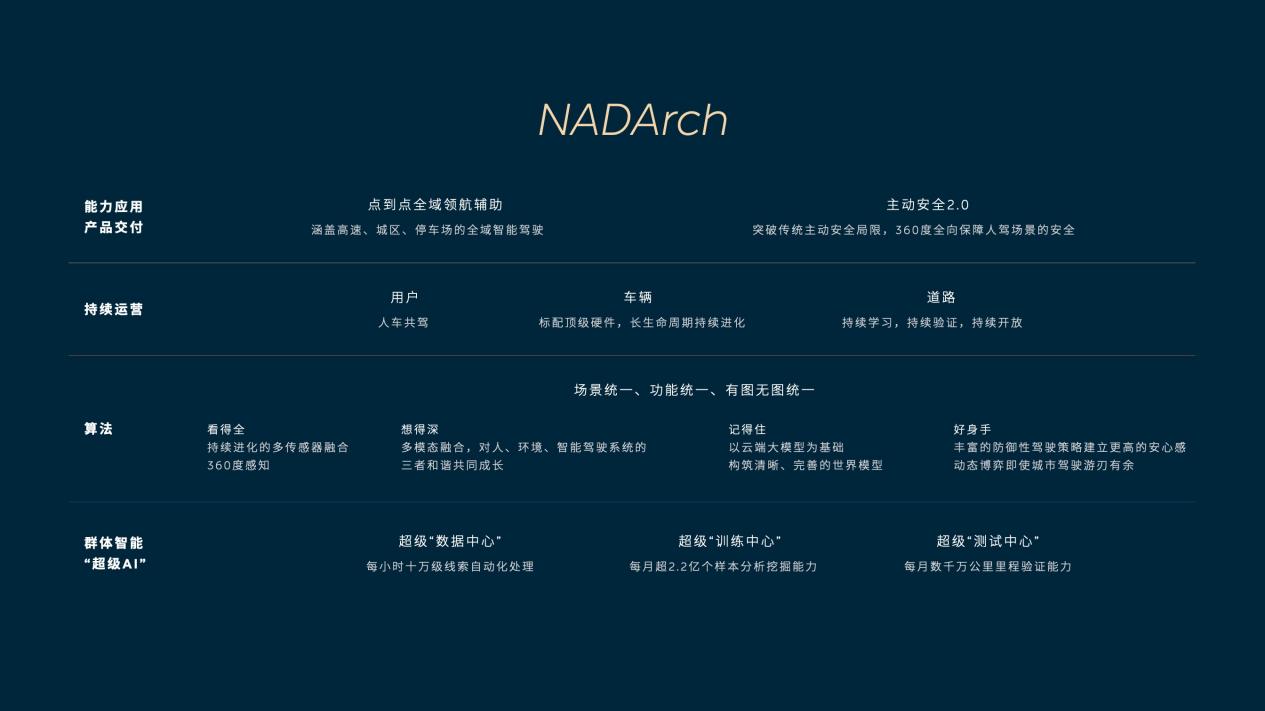
在每一辆蔚来NT2.0平台车型上,都拥有一块算力高达254TOPS的群体智能与个性化训练芯片,形成一支端云总算力高达230.29EOPS的智能车队。蔚来基于智能车队构建的群体智能架构,能够在量产车上分布式验证用户行驶过的道路以及使用过的智能驾驶功能。每月实车验证里程超2,000万公里,单一路线5次验证自动准出,加速实现智能驾驶系统升级迭代,保证智能驾驶用户功能体验持续进化。
在高速公路以及城市快速路等使用场景中,全域领航辅助NOP+可完成自主调速、自主选择最优车道、超越慢车、施工绕行、对大型车辆主动偏移、根据导航路线进出匝道等一系列驾驶任务。而在城市道路使用场景中,该功能除了可完成自主调速、自主选择最优车道、超越慢车外,还支持红绿灯识别与启停,以及跟随导航路线在路口自主完成左转、右转以及掉头,绕行临停车辆、两轮车及施工场景等极端场景实现防御性驾驶,还可根据限行时间,完成驶离公交车道等驾驶任务。
为确保智能驾驶的高安全性与高可用性,蔚来对每一条道路进行验证,及时发现问题,并针对性地学习以解决问题。在优化之后开通,并进行持续运营。截至发布会当日,全域道路验证里程达到1,207,977公里,覆盖726座城市,其中高速、城市快速路验证里程36万公里,城区道路验证里程达到84.7万公里。

在发布会上,蔚来还推出了智能驾驶可用指数与安全指数,以衡量智能驾驶系统的可用性和安全性。智能驾驶系统旨在赋能用户的驾驶技能,而非取代关系。此次,蔚来全域领航辅助NOP+全量推送,也标志着“人车共驾”新时代的开启。
蔚来将舱内人脸视线检测和舱外感知系统结合在一起,打造出人车共驾安全模型ADMS,实现驾驶场景识别、驾驶员意图预测、注意力识别、多模信息融合,风险场景有效提醒率提高了3.5倍,进一步规避事故发生。
此外,蔚来还推出了驾驶员安全行为引导机制——“智驾分”,主要从专注安全驾驶、合理完成系统接管响应,以及良好的驾驶经验积累三个方面,对过去30个智能驾驶使用日的人车共驾行为进行模型化评估(新用户为100公里智能驾驶里程)。通过分值变化,让驾驶员关注并持续确保自身正确的驾驶行为。
