沃泽干股理念:干市场,就干核心资产,核心资产不好干,也得干主线,不然就是被市场干。
灵巧手是机器人的核心部件,根据特斯拉公开资料,特斯拉第三代灵巧手相比于第二代的变化为:
(1)手部增加了自由度,从11个提升到22个,从而对应的电机数量将可能从原本的6个提升到13~17个;
(2)驱动器装载部位由手部改为手腕。驱动上,电机驱动是当前主流的灵巧手驱动方式,由于第三代灵巧手自由度增加,所需电机数量增加,利好空心杯电机和无刷有齿槽电机供应商。
传动上,腱绳+蜗轮蜗杆是特斯拉第一代方案,随着行业灵巧手丝杠的日渐成熟,叠加特斯拉提升单手承载力的需求,手部采用丝杠进行传动可能是一种发展方向,若单手丝杠为13根,则单个人形机器人需要26根丝杠,利好丝杠产业链供应商。
一 灵巧手的组成

随着工业自动化和人工智能技术的不断进步,机器人正逐渐从单一的重复性任务执行者转变为能够执行复杂、多变任务的智能体。
在这一转变过程中,灵巧手作为机器人与外界交互的重要工具,其重要性日益凸显。
灵巧手的设计灵感来源于人类手部的复杂结构和功能,它使得机器人能够执行诸如抓取、操纵、甚至感知等多样化任务,极大地扩展了机器人的应用范围和操作能力。
灵巧手的组成是实现其多功能性的基础。一个典型的灵巧手系统通常由以下几个关键部分组成:
(1)驱动系统:负责提供动力,使手指能够进行各种运动。驱动系统包括电机、气动和液压等类型。
(2)传动系统:将驱动系统产生的动力转换为手指关节的运动。传动系统包括丝杠、齿轮、连杆、绳索和腱绳等。
(3)传感器系统:包括触觉、力觉和位置传感器等,用于感知手部与外界物体的接触状态和力度,以及手部自身的位
置和运动状态。
(4)控制系统:通过算法和软件对驱动系统和传动系统进行精确控制,以实现预定的手部运动和任务执行。
二 灵巧手的驱动方式
灵巧手主要的驱动方式包含4种:电机驱动、液压驱动、气压驱动和形状记忆合金驱动。
电机驱动兼备精度和经济性。电机驱动方式中,电机经减速器控制转矩和转速后通过其他传动装置将旋转运动转化为手指的弯曲运动。驱动系统主要由电机、减速器组成。优势在于体积小、响应快、调控方便、稳定性好、精度高、输出力矩稳定等。后文将对主流手部电机空心杯电机和无刷有齿槽电机进行详细拆解。
液压驱动适用于大力抓取,但体积过于庞大。液压驱动方式中,不可压缩的液体将被压入封闭系统,进而推动活塞移动,使手指产生力量和运动。驱动系统一般由液动机、伺服阀、油泵和油箱组成,常被用于工业机械手中,适合大型抓取作业。人手的重量较低,但可以实现单手吊环等大力输出动作,液压实现大力抓取的可能性最大,但系统庞大小型化和便捷性技术有待突破。
气压和形状记忆合金驱动重复定位精度较低。气压驱动方式中,将对空气进行压缩,空气的压力会推动活塞或膜片移动,进而转换成机器人手的运动。气压因为难以实现精确的位置控制,常用在简单的抓持手,不能实现多关节的灵活运动。
形状记忆合金驱动经过变形后加热到一定温度,可以恢复到之前的形状而产生力驱动灵巧手的运动,但无法长时间工作,并且疲劳强度较低。

综合对比可知,电机驱动是最适合灵巧手批量生产使用的方式。主要因为随着电机设计、加工技术以及电子技术等的进步,能够为灵巧手提供体积小、出力大的微型电机,其次因为电能的获取、存储容易,为电机提供了应用的基础。可能采用的电机包括空心杯电机、无刷有齿槽电机等。
空心杯电机方案能效高,适合电池供电且长时间运行的灵巧手。空心杯电动机采用无铁芯转子,消除了由于铁芯形成涡流而造成的电能损耗,因此效率更高,转动惯量小,易于控制。根据《空心杯微型电机及线圈的研究进展》,空心杯电机主要具备以下特点:
(1)节能特性:能量转换效率很高,其最大效率一般在65%以上,部分产品可达到90%以上(铁芯电动机一般不超过75%)。
(2)控制特性:起动、制动迅速,响应极快,根据《空心杯微型电机及线圈的研究进展》,机械时间常数小于28毫秒,部分产品可以达到10毫秒以内(铁芯电动机一般在100毫秒以上)。
(3)波动特性:运行稳定性十分可靠,转速的波动很小。作为微型电动机,空心杯电机的转速波动能够容易的控制在2%以内。因此空心杯电机特别适合电池供电同时又要求长时间运行的应用场合,例如仿生手、人形机器人和手持电动工具等。
三 灵巧手传动方式
传动方式主要包含腱绳、丝杠、齿轮、连杆等。
早期灵巧手曾经采用齿轮、连杆等传动机构,然而因为尺寸和质量大、运动不灵活等问题逐渐被淘汰。模仿动物肌腱传动方式的腱绳传动目前广泛被灵巧手采用,根据各公司2024年中报,上市公司正集中研发手部丝杠,布局丝杠正成为传动的发展趋势。
腱绳传动,使用线绳模拟人手的肌腱结构,可以使得大型的驱动器远离执行机构,减轻末端的负载和惯量,提升了抓取的速度,排布灵活,因此适合空间狭小且需要驱动自由度数目较多的传动场合。
连杆传动,使用多个连杆串并联混合的形式传递运动和力矩。手指的运动和动力由刚性连杆传递,能够抓取大型的物体且结构设计紧凑,可以完成包络抓取。缺点是难以远距离控制,容易发生弹射,且抓取空间较小。

灵巧手的传动装置一般可以分为三级:
(1)第一级:位于电机侧,主要为减速器,起到的作用是精度调节;
(2)第二级:最重要,负责动作执行;
(3)第三级:连接驱动器和关节末端,主要是腱绳和连杆。从市场案例看,一级传动以皮带为主,二级传动主要采用丝杠或者锥齿轮,三级传动基本都会采用腱绳和连杆。
综合对比看,各种方案各有所长,但由于工厂中的劳动场景需要有较高的承载力,而丝杠是承载力最高的传动方案,因此有可能在工厂场景中成为主流。
四 灵巧手的传感器
总体手部上可使用的传感器包含力、位移、触觉、角位移、视觉、压力、力矩、位置、霍尔和温度传感器等。
其中,触觉、视觉和温度传感器属于外部感知,力、位移、角位移和力矩属于内部感知。

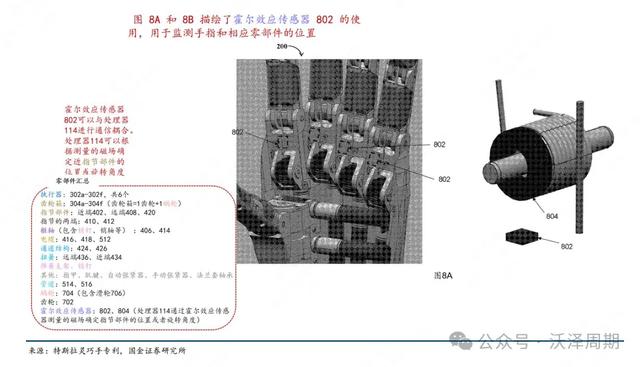
据《机器人灵巧手:建模、规划与仿真》,用于灵巧手的传感器主要有位置和触觉传感器,测量关节位置是实现手指运动控制所必需的基本要求,实际中经常用霍尔元件、电位计和光学传感器来测量位置。而触觉传感器主要用于反馈接触信息,一般包含力传感器和接触传感器两种。其他的传感器可以针对特殊任务需要而增加,如接近觉、视觉、加速度和振动等。
具体使用案例上,根据特斯拉GEN2发布会,特斯拉机器人上确定搭载了触觉传感器。对于其他的方案,总体还有多种传感器可以选择,如DLR/HITHand官网显示,其使用了关节力矩传感器、关节绝对位置传感器、电机霍尔传感器、触觉传感器和温度传感器。

五 相关重点标的梳理
当前美国在机器人灵巧手技术上处于领先地位,特别是在人工智能、传感器融合以及仿生技术领域有显著优势。
美国的许多公司和研究机构在灵巧手的硬件设计和智能化控制系统方面积累了大量的技术经验。中国近年在机器人灵巧手领域的技术积累迅速增长,尽管与美、欧相比还有一定差距,但市场规模庞大,政府支持力度强,市场化进程快。
自由度角度看,海外特斯拉、ShadowHand、SCHUNK和ILDA已经将DOF自由度做到20个以上,国内青龙灵巧手自由度做到19个,处于国内较为领先地位。抓握力角度,海外的QBhand和国内的星动纪元较为领先,抓握力分别达到62N和80N。国内市场上,因时机器人、傲意、腾讯RoboticsX实验室等企业也在积极布局,且具有低成本供应链优势,未来国产灵巧手有望占据更多市场份额。
五洲新春:公司将发展灵巧手、旋转执行器和线性执行器上面的滚柱丝杠产品。24H1已经实现小批量产品销售。
双林股份:已完成人形机器人滚柱丝杠研发立项,样件制作和设备投资在按计划推进。
汉威科技:旗下子公司苏州能斯达已建立稳定纳米敏感材料体系,2024年上半年,传感器营收1.55亿元。
弘信电子:压力传感器领域有所积累,2024年上半年营收30.37亿元。
柯力传感:触觉传感器已启动与多家企业、院校的合作,同时以自研模式进行研发,目前尚处于研发验证阶段。
兆威机电:兆威机电从微型驱动领域出发,致力于帮助机器人实现应用落地。公司精密减速箱、高性能电机、电控系统的产品组合适用于机器人头部、手指等运动执行等应用,具有精度高、尺寸小、重量轻等特点。公司生产的机器关节无刷舵机应用于机器人的角度传感器和齿轮驱动装置,提高了机器人的关节控制,让机器人关节转动更具灵活性。公司的高转矩直流电机和无刷空心杯电机均已形成系列产品,成功用于人形机器人领域。

兆威机电长期为苹果供应消费电子控制执行模组,产品良率高,成本把控能力较强产品定位高端,定制化研发设计经验丰富,目前已经与T公司进行送样沟通,未来或将进一步整合拓展灵巧手业务,有望增厚机器人板块业绩表现。
风险提示:本文仅为个人笔记,不能作为投资决策的依据,不构成任何建议,据此入市风险自担。


