自从智驾成为风口后,每隔两三年就会出现新的“方向”。最初是高精地图方案,厘米级的车道定位能大幅减少车端算力的需求,但其缺点是覆盖度不高、更新频率慢、成本贵。于是,高精地图方案被迅速抛弃,车企们纷纷推进不用高精地图的“无图”方案,能够快速应对道路上的突发变化,并适用于交通频繁变动的城市道路环境,缺点是感知算法和计算力方面的依赖性较高,系统对数据处理的要求非常严格,尤其在复杂道路环境中更需要强大的算力支撑。反映到实际操作上就是开得有点“纠结”,但绝对不会违反交规。
如今,AI逐渐普及后,“端到端”成为主流。这属于深度学习的概念,指的是一个AI大模型从输入到输出的完整过程,不需要人为干预或中间步骤。通过统一的深度学习神经网络整合感知、规划、控制等多个模块的功能,将传感器采集到的原始数据直接输入大模型中,经过处理后直接输出操作控制指令,如方向盘转角、油门踏板开度等。优势在于降低延迟和硬件成本、提高信息传递的准确性,通过学习人类驾驶行为,使自动驾驶更加拟人化。通俗来讲,就是此智驾系统不再“一板一眼”,会灵活变通,避让障碍物时,即便是黄实线也会压过去。相比传统意义上的无人驾驶,“端到端”更偏向于“人驾”。

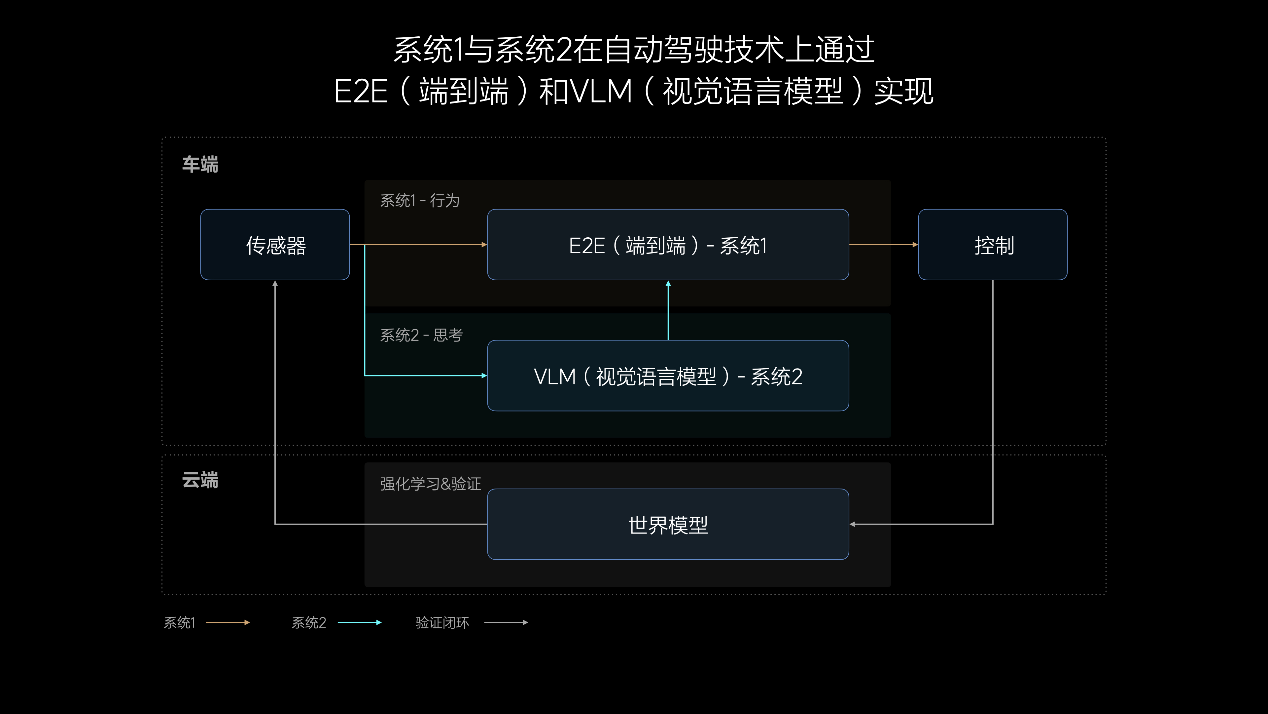
最近,小编参加了理想汽车端到端智能驾驶体验日。全程使用OTA 6.5版本智驾系统通过园区小路、城市道路、高速公路等,提前体验了理想汽车端到端+VLM的能力(预计11月底,OTA 6.5版本将推送给理想全量AD Max用户)。当然,整体试驾过程中,小编也遇到了几个小问题,与大家探讨一下。
场景一:在一条河边的双向双车道小路上,路面并不是直直一条,而是有点大“S”形,这就会导致有点视觉“误区”。当一辆卡车从对向车道正常驶来时,理想智驾系统判断两车会面对面撞上,于是就立马急刹减速,之后,系统又“看到”路面划线有转弯,再自动提速行驶。此举从系统逻辑上并没有什么问题,小编也可以理解,但对于后车来说,能不能理解前车突然急刹就是另一回事了。

场景二:同样在这一条大“S”形道路上,没有机动车与非机动车区域划线,前方有辆非机动车“占道”行驶,小编乘坐的理想汽车就一直在其后面行驶。其间有数次打灯想要跨越黄实线超车,却因为“发现”对向有来车而取消,直到非机动车转弯开走,让开道路。这一点就比较值得肯定,不管超车有没有成功,但理想汽车这套系统至少说明了“自主超车”的想法更偏向于“人驾”。
场景三:城市道路,双向六车道。理想汽车转向汇入主干道时,面临一个向左变道两次的指令。常规人驾(绝对不吃罚单)的做法是,观察后方来车,确保安全的情况下,打转向灯三秒后变道,然后整个流程再来一次。理想智驾的做法基本差不多,但有一点区别,就是打转向灯的时间绝对没有三秒,最多一秒,然后就迅速变道两次,这个做法有点“老司机”。
场景四:城市道路,双车道辅路,导航右转。这里有个特殊情况,一辆清障车停在右转道路口施工,只能向左变道绕行,但路面是白实线。人驾情况下,标准做法是,先停下,观察左后视镜,打灯,变道,绕行。但理想智驾在这里的做法非常丝滑,减速-打灯-变道,一气呵成,整个环节在一两秒内完成。快得小编都没反应过来,一把抓住转动的方向盘。于是,智驾取消,转为人工操作。此场景和上面的场景三可以作为对比,打转向灯与变道衔接的过快,在不同场景下的应用有着截然相反的结果。

场景五:厂区门口路况,走的是两车道道路,快到路口时,变成了三车道,多出一条右转专用道。根据导航显示,智驾需要从最左车道变道至最右车道,即将右转。这时候问题来了,有一辆集装箱卡车在中间车道上龟速行驶,走走停停,猜测是在找路边停车位,理想智驾变道至卡车后方之后,卡车又向前挪动了几米后停下,理想也就跟随其完全停下。个人猜测,系统可能“误认为”这是拥堵路段,做出了跟车等待通行的指令。在等待30秒后,眼见前方卡车依然不走,小编选择了人工介入,向左变道驶离。事后复盘,引起智驾做出错误操作的原因应该就是卡车的“龟速行驶,走走停停”,不然应该会将其视为障碍物绕行。
场景六:城市道路,三直行车道超车。理想智驾行驶在中间车道,前方有慢车,需要变道超车,且左右车道均比较空。按照人驾的思维模式,八成是从左边超车,因为右边靠近非机动车道,复杂因素较多。但理想智驾偏偏选择从右边超车,反其道行之。果不其然,超车后不久就遇上了路边违停车辆,不得不减速再次变道中间车道。事后讨论,可能理想智驾的逻辑为,别人都往左边超车,我就偏偏往右,路况可能会空一些。

试驾总结:
总体而言,理想汽车的OTA 6.5版本智驾确实比较偏向于“人驾”,在环岛、掉头、高速收费站ETC通行时,确实方便不少,终点匹配AVP代客泊车路线也非常丝滑。但需要指出的是,这套AI大模型还需要参考更多场景,也要把不断更新的交通法规参考进去。偏向于“人驾”这个大方向没错,目前就是要完善算法,采集更多的样本,让“人驾”更符合人驾。
值得一提的是,小编在体验日还试了下理想汽车的AES自动紧急转向系统。原理就是,当出现AEB无法规避事故的物理极限时,打一把方向避过就行,惹不起但躲得起。AES系统,全程全自动、无需人为打方向盘,就能做到高速“麋鹿测试”。但需要指出的是,小编是在提前知道此体验项目的情况下,全程忍住了没有上手,如果用户在遇到紧急情况下,双手握紧方向盘,在人工介入和AES产生冲突的情况下,不知道会发生什么。下次遇到理想工程师,一定要问问清楚。
