一凡 发自 副驾寺
智能车参考 | 公众号 AI4Auto
日本在玩一种很新的自动驾驶:
用机器人开车。
这就是日本东京大学的最新成果,用一个人形机器人,驾驶一台带手刹的老车。
开辟了一条自动驾驶新赛道,准备换道超车,引发关注热议。
但是,好像哪里不太对劲。
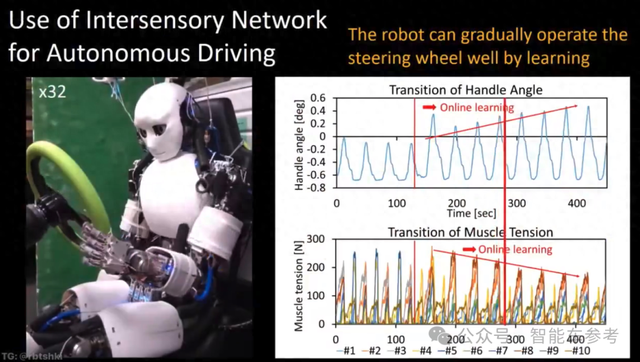
用机器人实现自动驾驶东京大学研究的这款名为武藏的人形机器人,拥有类似人的“骨骼”和“肌肉”,眼睛装有摄像头,可以感知到前方来车和人类。

手脚都安装了传感器,可以操作方向盘转弯:

控制脚踏板,加速或者刹车:

甚至还能拉手刹,一个目前相对罕见的操作:

所以演示车辆可能是款手动挡车,但是看起来车内似乎只有两个踏板,目前尚不清楚这么做的用意。

这就是东京大学河原塚健人 (Kento Kawaharazuka) 团队演示的最新成果。
河原塚健人,在东京大学一路读完了本硕博,2022年博士毕业后留校任职助理教授。
最近有5篇论文被机器人顶会ICRA (IEEE International Conference on Robotics and Automantion) 2024接收,其中两篇为第一作者。
今年2月,在ICRA 2024会议期间,他还参与组织了一场“烹饪机器人研讨会”。

倒也不是说健人桑想要做一堆专用机器人,这个负责炒菜,那个负责开车。
在其论文《Toward Autonomous Driving by Musculoskeletal Humanoids》中,他和团队提出,未来将扩展机器人的能力,不仅能够驾驶车辆,还要能够搬重物和做家务,打造一个通用人形机器人。
当下的话,主要还是提高机器人的开车能力,比如改善手指结构的问题,可能会被方向盘卡住。

还有对速度的感知和控制,以及对踏板等部件的控制精度和速度。
因为目前该机器人仅能以5km/h的时速在非开放道路开车,据科学网报道,河原塚健人也承认:
踏板的速度或汽车的速度都不快。此外,与人类相比,机器人的操控速度也不够快。
找个机器人开车,实现自动驾驶,这样人类就从驾驶任务中解放了。
听起来,这似乎还不错。
但是,是不是有哪里不太对?
 自动驾驶与具身智能
自动驾驶与具身智能对于自动驾驶与机器人的关系,多名行业巨咖都曾发表过自己的观点。
马斯克在去年的特斯拉股东大会上表示,特斯拉汽车就是放在轮子上的机器人。
他还透露,特斯拉自动驾驶程序FSD,在底层和其机器人Optmus通用。
在国内,李彦宏也很早就提出了“汽车机器人”的概念。
近日,张亚勤在北京智源大会2024上也提出:
无人驾驶L4+是具身智能第一个最大的应用。无人驾驶本身就是一个特殊机器人。
AI大牛Raque Urtasun创办的无人卡车公司Waabi,最近也官宣,实现无人驾驶只是第一步,未来要将能力扩展至仓库机器人和人形机器人。

总结大咖们的表述来看,可以说,智能车就是一种机器人,核心程序能够共用。
实现自动驾驶,也是为实现具身智能做铺垫。
自动驾驶是一条道路,汽车是收集数据的手段,加速通往具身智能的终点。
作为具身智能的一种形态,用人形机器人去开车,似乎是跳过了“汽车机器人”的阶段,开辟了一条新的“自动驾驶”实现路径。
这种新奇的方式,自然引来不少热议和争论。
有网友对此表示认可,认为这是“AGI的一种应用场景”:

也有网友对此持否定态度,觉得这是“点错科技树”了:

无论外界如何看待,河原塚健人对这项研究很坚决:
我不是在展望10年或20年后的未来,而是在展望50年或100年后的未来。
这种方式可行吗,你怎么看?
参考链接:https://news.sciencenet.cn/sbhtmlnews/2024/6/380030.shtm
