发明挖掘机的人真是一个天才,如果隔壁有台挖掘机在工作,老中青各年龄层都能蹲在旁边看一整天,挖掘机为什么有如此大的魅力?

假如,我们要从一个很高的箱子里挖出石子,但挖掘机的机械臂却撞在了箱子的侧壁上,工作被迫中断,这时该怎么办?正确的思路是搭几级台阶,让挖掘机自己“爬”上去,从而在这个高度正常挖掘。但挖掘机又不会飞,它该如何“攀登”呢?
其实,挖掘机“攀登”的秘诀在于其巧妙的机械结构。
首先,它可以把铲斗固定在平台上,然后让机身倾斜,再利用履带爬上去。这个过程就像我们人类爬台阶一样,相比于人类,挖掘机的优势还更大一些。它有一个强有力的“大爪子”,没有台阶挖掘机还可以自己搭。

这个“大爪子”就是机械臂,是挖掘机工作的核心部件,主要分为前端的小臂和后方的动臂,由驾驶室的两个操纵杆控制。当驾驶员向前移动左边的操纵杆时,高压流体就会进入小臂的液压缸,使小臂被抬起来。而铲斗的旋转则是由右边的操纵杆控制,高压流体推动铲斗液压缸的活塞,使铲斗向下翻转。
除了这两个液压缸,动臂与机身之间还有一个液压缸。如果想要使动臂向下运动,驾驶员只需要向前移动右边的操纵杆即可。此时,铲斗的末端就形成了一个支点,固定在了平台上。

如果再次增加这个液压缸的压力,由于铲斗的固定作用,机身就会倾斜起来。在倾斜的过程中,履带也会抓住台阶向前爬动,最终,挖掘机就可以稳定地停在平台的边缘上。
其实,挖掘机并不是直接爬上去,而是把固定住的铲斗移开,然后利用回转马达进行旋转的。回转马达也是由液压驱动,可以使挖掘机的机身在一个平面上任意旋转。当挖掘机处于倾斜状态时,驾驶员会操作回转马达,将机身背对台阶,然后重复之前的步骤,将铲斗固定在地面,减少动臂液压缸的长度,这样挖掘机机身就会以铲斗为支点被撑起来。

最后,驾驶员只需要执行倒车操作即可。如果还剩下一个台阶,只需重复刚才的完整步骤就能到达预定位置。
挖掘机的履带也是其设计中的一个精妙之处。和坦克的履带结构一样,挖掘机的履带也是由链轮、导向轮、拖链轮和承重轮等组成,为挖掘机提供稳定的支撑。
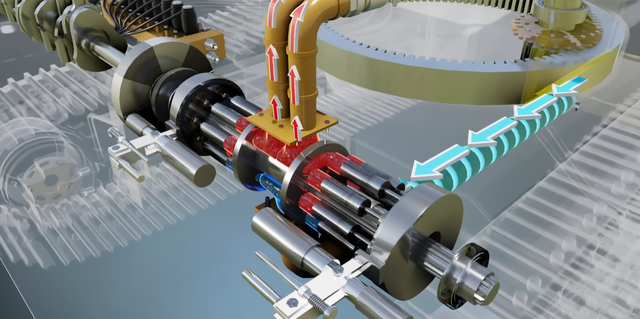
挖掘机的履带动力来源于履带马达,它是履带的动力心脏。履带马达里面有一系列的零件,与传统马达不同,它并不是由电力驱动,而是靠液压。

液压油从下方注入柱塞,柱塞受到液压油的推力,同时受到斜盘的支撑力。根据平行四边形法则,这两个力的合力便沿着斜盘向上。此时,柱塞便有了沿斜盘向上运动的趋势。
同时,柱塞又受到钢体的限制,根据作用力与反作用力原理,钢体便通过柱塞得到一个旋转的力矩开始旋转。

随着液压油不断压入和排出,缸体便得到源源不断的动力,持续旋转,旋转传递到行星齿轮箱,然后由齿轮箱将动力输出到链轮,驱动履带。每条履带都由独立的液压马达控制,因此,只要让两个液压马达以不同的速度运转,挖掘机就可以实现灵活转弯。

我们之前提到的回转马达也是类似的液压马达,它沿着大型齿环运动,实现旋转功能。可以看到,挖掘机的机械臂运动、行走以及旋转都依靠液压油。
这种高浓度的液压油由一组轴向活塞泵控制,它看起来与我们前面讲到的液压马达相似,但实际上它是个泵,这个泵由一台大型柴油发动机驱动,就像挖掘机的心脏,为挖掘机运行输送“血液”,保证挖掘机正常工作。通过调整斜盘的角度,就可以改变输出压力,从而精准控制挖掘机的各种动作。
以动臂的升降为例,为了提升动臂,液压油必须到达油缸这一侧,当驾驶员移动操纵杆时,这个动作会向挖掘机的电子控制单元ECU发送一个电信号。
ECU的任务是确保高压流体从轴向泵到达动臂的油缸,这还额外需要一个组件,即流体阀。如果阀芯向右移动,液压油将会进入油缸的下部区域,上部的液压油将顺着管线流回阀内,动臂就被抬起来了。如果想让动臂下降,只需将阀芯向左移动即可。

那么,如何精确控制阀芯的左右移动呢?答案还是液压。
这是两个电磁阀和一个小型齿轮泵的作用。当激活左侧的电磁阀时,流体压力便会推动阀芯向上移动,来自齿轮泵的液压油推动流体阀芯向右。如果想让流体阀芯向左移动,只需激活另一个电磁阀即可。当移动操纵杆时,ECU会向电磁阀发送信号,电磁阀释放高压流体来控制流体阀芯,从而实现相应动作。

履带是安装在底盘上的,而挖掘机的底盘学名叫做“下部行走体”,它承载着挖掘机的全部重量。在“下部行走体”上面还有一个旋转体,和坦克炮塔一样可以旋转,主要由发动机、液压泵等辅助器械构成,是挖掘机的动力源和控制旋转的中心。

另外,“下部行走体”里也有配重部件,它是用于保持挖机平衡的,在挖掘机工作过程中起着至关重要的作用,要不然,挖掘机很容易翻车。
