无人机作业流程
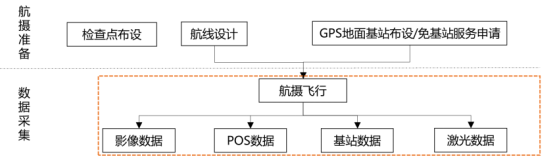
华测导航的无人机搭载激光扫描设备,能够在空中对测区进行快速、全面的扫描。作业筹备阶段,需要依据卫星影像或已有的DOM数据来进行航线初步规划。然而,仅仅依赖这些数据是不够的,还需要实地踏勘。在进行踏勘时,专业团队会考察测区的交通便捷性、居民地的分布情况、地理情况以及当地的气候。这些信息,为航线的规划及作业执行提供了保障。
航线设计完成后,需在已知控制点架设GNSS基站,以保障扫描数据的精度。随后,无人机将按照预设的航线进行飞行,并在飞行过程中进行数据采集。数据采集时,操作人员需通过手持端控制器对无人机进行实时监控和调整。

手持端控制器
与无人机相比,无人船主要用于水下地形的测量。无人船作业前需布设测线,在航行中实时测量水下地形。操作人员通过计算机导航和监控,确保数据准确完整。外业数据采集完成后,需要进行内业数据处理。首先,需将采集到的激光点云数据进行拷贝和整理。随后,利用CoPre2.0等软件进行点云与DOM的生成。在生成过程中,可以根据需要选择坐标系和设置参数,以得到符合要求的测绘成果。
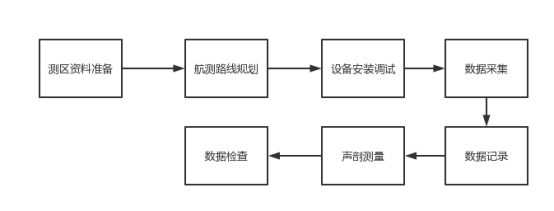
无人船作业流程
在激光点云预处理的基础上,可以进行DEM(数字高程模型)的生产和倾斜模型的建立。DEM生产主要基于点云数据的高程信息,通过插值等方法生成连续的数字高程模型。而倾斜模型的建立则基于原始影像及空三成果,通过密集点云生成、构网贴图等步骤,最终生成具有真实感的三维模型。
利用生成的测绘成果,还可以进行地裂缝分析和滑坡分析等工作。这些分析工作主要基于激光点云数据、DOM和DEM等数据进行综合分析和判断,为地质灾害的预防和治理提供科学依据。华测三维机载激光扫描系统的操作流程涵盖了从外业数据采集到内业数据处理与分析的全过程。其高效、精确的特点使得该系统在测绘作业中具有广泛的应用前景。