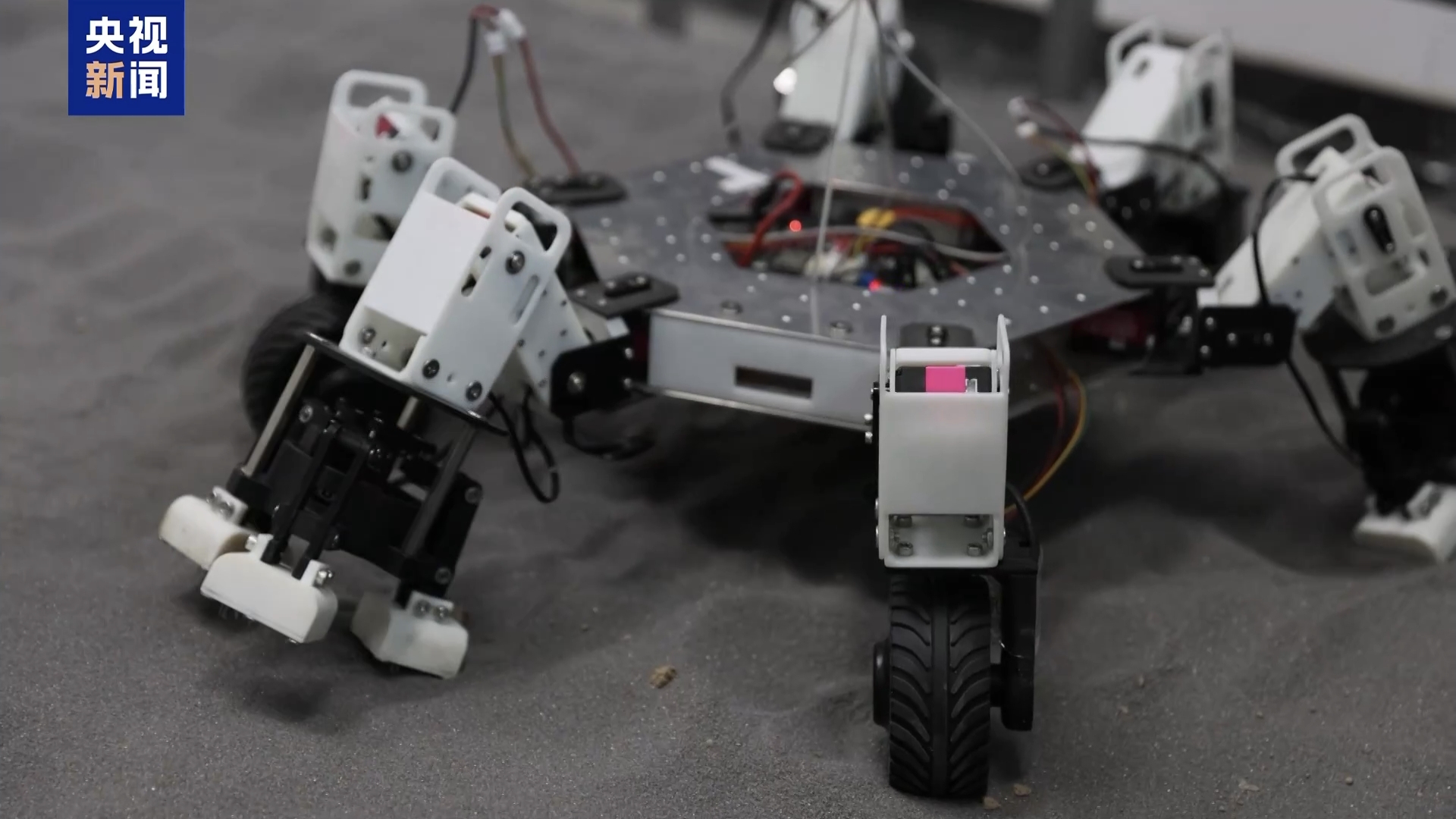
图源 央视新闻
地球资源告急,人类将采矿战场搬到了太空!
近日,中国矿业大学刘新华教授团队研制的国内首台太空采矿机器人通过专利初审,标志着我国在星际资源开发领域迈出关键一步。这款“星际矿工”有何黑科技?
突破性设计:仿生六足+昆虫爪刺传统采矿设备难以适应太空微重力环境,而该机器人采用仿生六足结构,三足为轮、三足为爪,能灵活切换移动模式——车轮应对平坦地形,爪刺则像昆虫足部阵列般嵌入岩缝,在低重力下牢牢锚固,防止作业漂移。团队从啄木鸟攀附运动和折纸技术中汲取灵感,实现移动、锚固、采样一体化,甚至能钻探月球表面硬度达7级的月壤。
材料黑科技:扛住-250℃极寒为抵御太空极端温差和辐射,机器人主体采用铝基碳化硅复合材料,轮体则用镍基钛记忆合金,即便变形也能快速复原。其差动系统可实时调整结构,在崎岖小行星地表稳定运行。
模拟训练:悬吊系统还原太空环境团队独创“悬吊法”模拟微重力,用垂直拉力抵消地球重力,并搭建沙壤风化层和真空实验室,精准复刻月球-180℃至130℃极端温差环境,确保机器人实测数据与太空任务高度匹配。
目标锁定月球氦-3与小行星稀土据专家透露,月球氦-3储量超百万吨,可支撑地球万年核能需求;而近地小行星富含稀土及铁镍钴等战略金属,1500余颗已具备开采价值。我国计划2028年发射嫦娥八号验证月球资源原位利用,为2035年建成国际月球科研站铺路。
未来,“星际矿工”或实现边采边转化能源,推动人类迈入“太空工业时代”。这场星辰大海的掘金赛,中国将抢占先机!

图源 央视新闻

