嫦娥六号探测器进入绕月轨道至今已半月有余,按照计划,该探测器再过几天也就是下月初就要执行一项关系生死成败的重要任务:登月。
我国探月工程在此之前已经实施嫦娥三号、嫦娥四号、嫦娥五号总计3次登月任务,三次登月次次成功,至今仍保持着100%登月成功率,嫦娥六号能否延续这种成功?此次登月与前几次登月又有哪些异同?

先抛出结论:嫦娥六号将执行人类迄今为止最为复杂最为艰巨的登月任务。
工程与科学团队为嫦娥六号选择的预选着陆区位于“南极-艾特肯盆地”内,这地名乍一看给人的感觉是有些歧义的,以前很多人误以为嫦娥六号要去月球南极,实际上并不是。
南极-艾特肯盆地是一个巨大的撞击坑,面积约有473万平方公里,大约相当于我国陆地疆域的一半大小,是太阳系岩石类天体中的第二大撞击坑,该盆地包含了月球南极区域的一部分,因此在冠名上加上了“南极”二字,其主体是在月球背面的南半球。
南极-艾特肯盆地内又包含着数量众多的撞击坑(也可称之为盆地),嫦娥六号的预选着陆区则是在该盆地内的“阿波罗盆地”的南端,具体坐标是43.2° ± 2° S, 154° ± 4° W,属于月球背面南半球中纬度区域,距离月球南极区域还有相当远的距离。

红圈区域是“南极-艾特肯盆地”,蓝框区域就是阿波罗盆地南端,是嫦娥六号的预选着陆区。
月球背面登陆难度通常要比月球正面高得多,主要体现在两个方面,首先是无法与地球进行直接通信,需要中继通信卫星进行接力通信,嫦娥六号任务得以实施的关键就在于前不久发射并部署在环月轨道上的鹊桥二号中继卫星。


鹊桥二号中继星
除了需要中继通信,另一个难点就是月球背面的地形相当复杂,可以先来看看月球正面与月球背面的对比图:

可以看到,月球正面有数量众多且面积广阔又平坦的月海,地形条件相对简单,而月球背面呢,密集分布着各类大大小小的撞击坑,这不仅意味着探测器在进行着陆操作时要考虑地形起伏高差,更重要的是,可供选择的着陆区面积也会更为狭小。
比如登陆月球正面的嫦娥三号的预选着陆区面积是约3万平方公里,接近海南岛的面积,而登陆月球背面的嫦娥四号的预选着陆区面积则仅有0.15万平方公里,面积相差20倍。
嫦娥六号是我国第二次以月球背面为目标的探测任务,第一次是嫦娥四号,两个探测器的登陆位置也都在南极-艾特肯盆地,两次月背登陆有着很多相似之处,但明显嫦娥六号更难。

在月球背面开展原位科学探测的嫦娥四号着陆器
着陆区面积更小,意味着需要探测器具备一定程度的“定时定点着陆能力”,就是着陆位置偏差不能过大,否则就可能撞山或掉沟里……
嫦娥系列着陆器截至目前仍不具备100米偏差范围内的高精度定点着陆能力,有人说,媒体早就报道过嫦娥四号位置偏差仅1米,要知道这里的1米偏差指的是着陆器在着陆末段为自己寻找的安全着陆点与实际落月后的着陆点之间的偏差,而在寻找安全着陆点的下降过程中,着陆器早已经大幅度偏离了从地球出发时选择的标称着陆点。
实际上,嫦娥系列着陆器的着陆位置偏差是公里级,嫦娥三号的实际落点与标称着陆点偏差约600米,嫦娥四号同类数据偏差是千米量级,嫦娥五号同类数据偏差达到了2.33公里。



导致着陆位置偏差大的原因是什么?主要是因为探测器的轨道控制发动机在实际运行过程中不可避免地存在推力数值偏差,从而影响到探测器的轨道控制精度,轨道控制偏差就直接导致着陆位置大范围偏差。

登陆月球背面面积狭小的着陆区客观上要求必须具备一定程度的定点着陆能力,否则是行不通的,怎么办呢?
提高探测器着陆精度通常有两个办法,一种是在探测器下降着陆过程中,基于地形相对导航方案,对着陆航迹下方的月面进行成像,将图像与探测器预先存储的月面遥感图像进行比对解算出偏差数据,进而调节反推发动机推力,使探测器的下降轨道数据更准确,从而确保高精度落月。
印度月船三号着陆器的着陆位置偏差是360米、日本SLIM探月智能着陆器虽然是以倒栽葱方式落月,但其着陆位置偏差却控制在了100米以内,这两个探测器皆应用了地形相对导航方案。

月船三号着陆器在800多米高度第一次悬停对月面成像,使用地形相对导航功能修正下降轨迹。

月球车拍摄的月船三号着陆器

月船三号着陆器的实际着陆点偏差仅约360米
所谓地形相对导航,其实就是在下降途中选择几个路标,根据路标反馈的信息来确定探测器的航向,半个世纪前,阿波罗12号也是基于这个原理实现了人类首次高精度落月控制,直接降落在勘测者三号无人着陆器附近,宇航员还亲自步行到后者附近拍摄了大量照片,并取回了勘测者三号的部分零件带回地球。
阿波罗12号与后来者印度月船三号、日本SLIM,都是基于地形相对导航方案,所不同的是,后两个探测器是基于机器视觉识别,而阿波罗12号则是依靠宇航员目视识别,这并没有什么难度,就像飞行员开飞机目视识别地面导航参照物一样。

阿波罗12号留守指令舱宇航员拍摄分离后的登月舱

阿波罗12号降落在了距离勘测者3号仅163米的位置,宇航员可以步行前往与之会和。

环月卫星LRO拍摄阿波罗12号与勘测者3号登月遗址遥感卫星图
除了地形相对导航方案,就是缩小探测器绕月飞行时的轨道面误差,该方案着陆精度虽然比不上地形相对导航方案,但也能够满足一定程度的定时定点着陆任务需求,该方案的首次应用是嫦娥四号任务。
嫦娥四号进入绕月轨道后并没有像嫦娥三号那样很快就登月,而是持续在绕月轨道飞行了二十多天才登月,这是为什么呢?
这是在轨道设计上专门预留的绕月飞行时间,目的是在此期间进行轨道控制,减少轨道积累残差,从而以最佳精度轨道进行登月。

嫦娥六号充分继承了以往嫦娥系列着陆器的功能设计,并没有配置类似印度月船三号、日本SLIM探月智能着陆器用到的地形相对导航功能组件,要想实现定时定点着陆就只能沿用嫦娥四号的通过控制绕月轨道偏差的方法。
但是,嫦娥六号与嫦娥四号相比毕竟有较大的差异,前者是由轨道器、返回器、着陆器、上升器组成的8吨级大规模无人月球采样返回探测器,后者则仅有一个着陆器与一辆小型月球车,发射质量3.78吨,嫦娥六号是其两倍有余。
重量的差异也意味着二者推进剂消耗量的不同,嫦娥六号作为嫦娥五号的备份探测器,原本就是针对月球正面采样任务设计,也并没有预留额外的推进剂用于轨道残差控制,从哪里搞推进剂呢?

轨道设计人员经过大量的模拟仿真验证后,找到了一个借力打力的办法。探测器从地球到月球都需要近月制动刹车,从而进入环月轨道,此阶段也是最消耗推进剂的阶段,而此阶段推进剂消耗也是“刚需”。
没有额外推进剂储备的嫦娥六号就是要从这个“刚需”身上想办法,同样是采样返回任务的嫦娥五号采用的是两次近月制动刹车进入目标绕月轨道的方案,嫦娥六号则不同,它选择的是三次近月制动刹车,每一次刹车都进入不同周期的绕月轨道,分别是12小时大椭圆轨道、4小时椭圆停泊轨道、200公里圆轨道。

由于目标轨道相同,所以即便增加一次近月制动,所消耗的推进剂总量,在近月制动环节,嫦娥六号与嫦娥五号一样,并没有额外消耗推进剂。
这三个轨道中有两个是椭圆轨道,嫦娥六号就是利用两个不同周期椭圆轨道面的特性进行轨道偏差控制,从而实现了在不额外消耗推进剂的情况下满足定时定点落月的轨道精度需求。
再说个题外话,嫦娥系列着陆器虽然至今没有使用类似印度月船三号、日本SLIM的地形相对导航的高精度定点着陆技术,这并不代表我们做不到,这是一个选择何时去做的问题,比如多年前,嫦娥四号遴选着陆目标时就有专家提议降落到嫦娥三号旁边,以展示我们的高精度着陆能力,而要实现这个目标就必然会用到地形相对导航的高精度定点着陆技术,之所以没有选择降落在嫦娥三号旁边,主要是认为月球背面的科学价值更高。接下来,我们将在嫦娥七号任务中应用基于地形导航的高精度着陆技术。
有了精确的轨道控制,接下来就可以登月了。所谓登月,指的就是月面软着陆,其总的要求就是让探测器的1.7公里/秒的飞行速度降为零。
嫦娥六号登月采用七步走方案逐段减速:
第一步:主减速段
在实施登月任务之前,嫦娥六号的轨道器/返回器组合体与着陆器/上升器组合体两两分离,着上组合体进入近月点15公里/远月点200公里的着陆准备轨道。

嫦娥六号着陆器/上升器组合体与轨道器/返回器组合体分离(动画效果图)

嫦娥五号的着陆器/上升器组合体与轨道器/返回器组合体分离(实拍)

嫦娥五号的着陆器/上升器组合体与轨道器/返回器组合体分离(实拍)
着陆时刻到来后,着上组合体从近月点15公里处开始进入主减速段,7500N变推力发动机点火开机,并保持最大推力运行,通过动力反推进行减速。

15kmX200km椭圆轨道是着陆准备轨道
第二步:快速调整段
此阶段主要是为了衔接后一阶段而设计,7500N变推力发动机推力逐步降低,同时探测器的姿态开始朝着垂直方向运动;

嫦娥四号的快速调整段(降落相机实拍)
第三步:接近段
如前文所述,登陆月球背面最大的难题之一就是地形过于崎岖复杂,以嫦娥四号为例,其着陆航迹下方的地形起伏高差就达到了上万米。
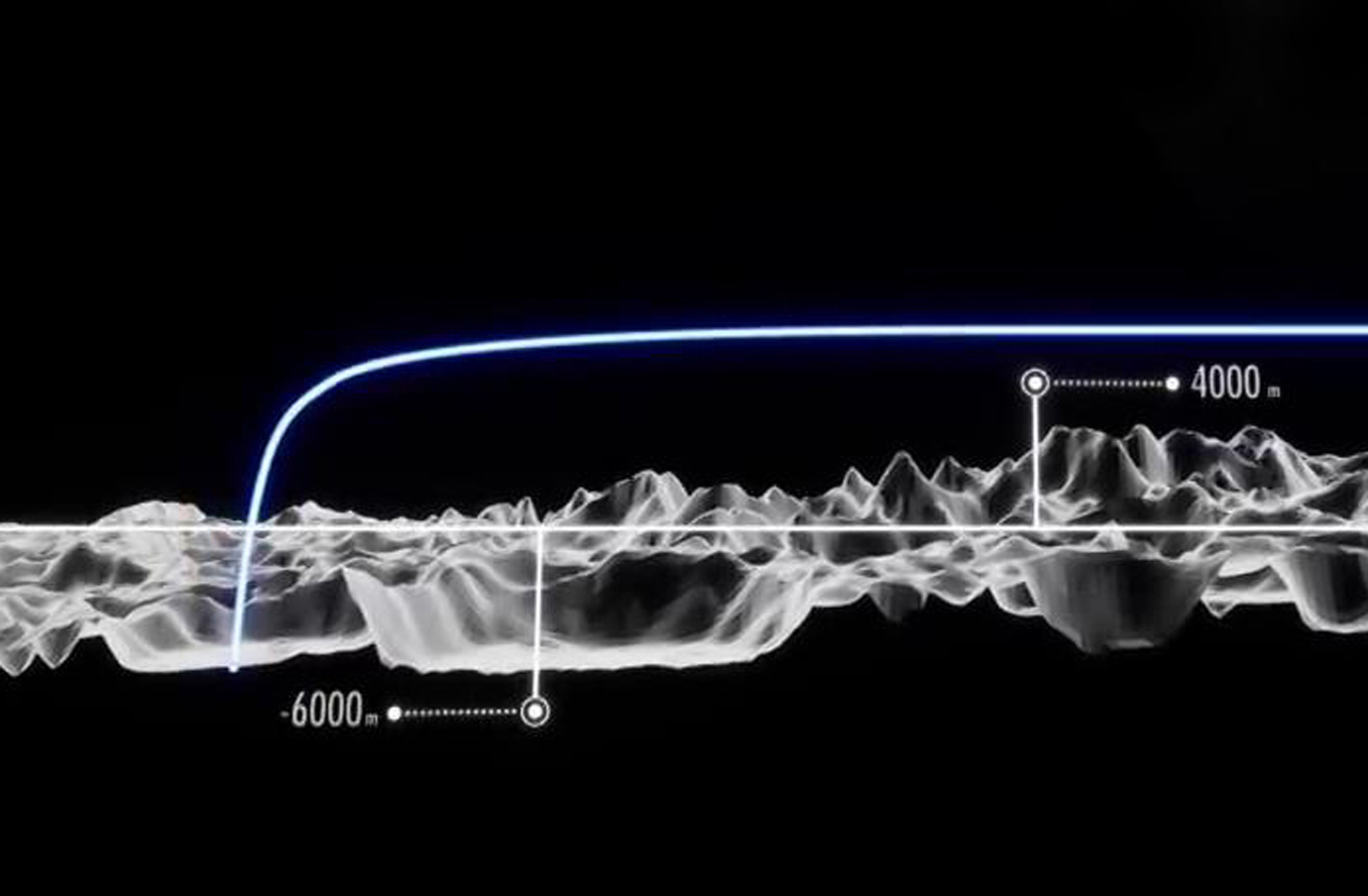
嫦娥六号的预选着陆区也是不遑多让,由于该探测器是逆行轨道,它将从东北方向进入下降航线,航线下方正是连绵起伏的环形山系,着陆航迹的终点则是阿波罗撞击坑南侧底部的一块月海,要想安全着陆同样也要飞越月球的万米高山。

嫦娥六号预估降落轨迹
探测器要想实现指哪落哪,没有准确的导航数据支撑是不可能的。嫦娥系列着陆器通常以惯性导航为基础,并引入测距测速数据修正惯导数据,从而确保探测器飞行在正确的着陆航线上。

但是,月球背面剧烈的地形起伏会导致探测器测距数据的剧烈波动,直接影响着陆器的着陆安全,怎么办?
五年前的嫦娥四号已经摸索出了一条新路,就是整个主减速段不引入测距测速修正,只用惯性导航数据,如此一来任你月面地形如何起伏都影响不到探测器的航迹控制。主减速段与快速调整段结束后,探测器直接就来到了预选着陆区上方,且此时着陆器的姿态就是垂直于月面,进而进入接近段。

嫦娥四号与嫦娥三号着陆轨迹对比,前者明显从更高的高度就转为垂直下降。
其实当主减速段结束时,探测器就已经接近于垂直,彼时的高度在8千米以上,这一高度非常接近地球上的珠穆朗玛峰的海拔高度,可以想象一下,这就约等于嫦娥六号着上组合体从珠峰高度纵身一跃,垂直降落。



探测器处于接近段时就已经来到了预选着陆区上方,此时测距测速敏感器可以直接对准着陆区域,因此数据波动就不再剧烈。
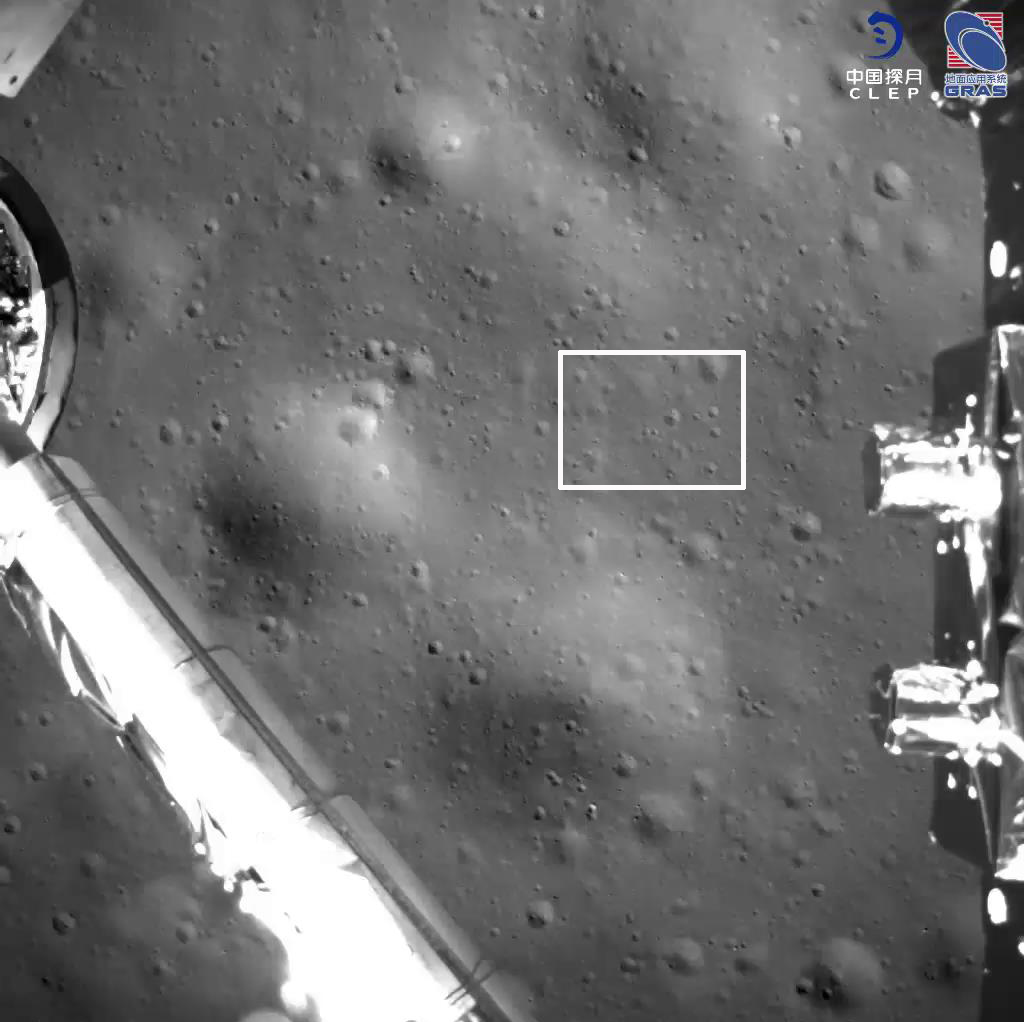
接近段也被称为粗避障段,当探测器降落至距月面2000米高度时,光学成像敏感器将对着陆区成像,并第一次选定安全着陆点,针对大的障碍物进行航迹调整。

嫦娥四号粗避障选择的安全着陆区,十字中心有撞击坑,这就需要后续精避障再次选择安全着陆点。
阿波罗盆地南侧是嫦娥六号的预选着陆区,实际上这个着陆区还细分出了三块采样区:

嫦娥六号预选着陆区
ABC三个区都属于比较平坦的地形,其中C区海拔高度较高,留给探测器进行动力减速的时间会比较短,但相对会更省推进剂,A区与B区看似平坦,实际上也是密布着数量众多的小型撞击坑。具体登陆哪个区域,还要根据具体的轨道约束条件来定。
第四步:悬停段
当嫦娥六号着陆器与上升器组合体距月面约100米高度时在7500N变推力发动机与姿控动力的助力下,探测器实现悬停,此时水平速度、垂直速度皆为零。
悬停的目的是使用激光三维成像敏感器与激光测距仪对着陆区进行高精度三维成像,并第二次选定安全着陆点(精避障)。此阶段耗时通常在15秒以内。

激光三维成像效果图
嫦娥四号悬停成像选择的安全着陆点
悬停成像是非常关键的一步,要为着陆器选择没有月坑、岩石等障碍物的落点,而且落点的坡度也不能大于8°,这既是着陆机构的设计要求,同时也是后续上升器月面起飞的需要。
第五步:避障段
探测器瞄准最终选定的安全着陆点进行斜向机动,此时下降速度为1.5米/秒,距离月面30米时,避障机动结束。

嫦娥三号避障段斜向机动飞行
第六步:缓速下降段
此阶段虽然名为缓速下降,但实际上该阶段的探测器下降速度相较于上一阶段是不降反升,由1.5米/秒调高至2米/秒,眼瞅着都要到终点了,为什么速度反而快了?
此时速度快一点的直接效果就是,缩短此阶段的耗时,如果下降速度慢一点,时间线就会拉长,这就会出现探测器的位置漂移,万一漂到旁边的坑里怎么办,时间线拉长还会加剧推进剂的消耗,同样不利于安全落月。因此缓速下降段在探测器可承受范围内适当加快了速度。

嫦娥四号缓速下降段(实拍)
按照常理,发动机应该在降落至月面后再关机,这样能保证探测器更平稳地落月,话虽如此,但如果这样做还会产生新的致命问题。
如果落月后再关机,反推发动机的羽流会吹起大量的月尘,这些月尘会大量吸附在探测器表面,不利于探测器落月后的安全运行。
因此探测器配置了关机敏感器,其在距离月面3米左右高度时会向发动机发出关机指令。
第七步:着陆缓冲段
探测器主发动机关机后,探测器以自由落体方式降落至月面,接地速度不大于3.8米/秒,这可能和我们感性认知的软着陆不太一样,比如搭载航天员的神舟飞船返回舱降落时的接地速度是不大于2.5米/秒。

主发动机关机,缓冲着陆。
这主要是承受能力不同所致,对于不载人的嫦娥系列着陆器而言,只要是不大于3.8米/秒就都是安全的,其最后的着陆冲击能量将由“腿式着陆缓冲机构”吸收。
在着陆腿内有内置铝蜂窝金属,着陆时通过自身的挤压吸收来自垂直方向的冲击力,同时连接着陆腿的拉杆结构内还内置有“高效吸能合金”,该合金还有一个别名“嫦娥钢”,其拉伸长度可达自身长度的80%至110%,有着很高的强度与塑性,可以通过自身的变形吸收来自水平方向的冲击力。

嫦娥钢拉伸测试

嫦娥四号着陆器的腿式着陆缓冲结构
至此,嫦娥六号着上组合体如能顺利完成这七步操作,我们就可以创造登月任务的四战四捷,人类首次月球背面采样返回任务也将胜利在望,我国探月工程的全月面到达能力将得到进一步巩固。

着陆器与上升器组合体效果图
话说回来,嫦娥六号着陆器与上升器组合体也是我国迄今为止降落月面最重的探测器,以嫦娥四号为例,其降落月面的重量就是1.2吨,而嫦娥六号就是顶着7500N变推力发动机的能力上限进行重量约束,估计着陆月面的重量在1.5吨左右。
其实这并非我们当前运力的上限,比如嫦娥五号与嫦娥六号都是顶着CZ-5大火箭地月转移轨道运力上限进行设计,但这两个8吨级探测器并不是完全用于登月的探测器,其轨道器与返回器组合体就不登月,如果将8吨级重量资源完全用于登月会是什么效果?

轨道器与返回器组合体并未完全用于登月任务
目前CZ-5大火箭正在研发直径更大的整流罩,旨在服务后续深空探测任务,会是什么任务呢?
指的可能就是嫦娥八号,此前已经有相关的官宣图流出,该探测器将专注于登月任务,预计着陆动力将配置两台7500N变推力发动机。以嫦娥三号的推进剂加注量与干重比值估算,依托CZ-5大火箭当前运力,嫦娥八号至少能够将月面着陆能力提高至2.7吨,届时就可以带规模更大的月球车,亦或者功能更丰富的月面机器人。

越来越多的实践表明,中国航天对于尖端复杂任务的攻坚克难能力是一天比一天强,不论是载人登月,还是火星采样返回,只要提出需求我们就能确保实现,正应了半个多世纪前的那句铿锵誓言:我们的目的一定要达到,我们的目的一定能够达到!
这个才是人类的正常速度,一步一步来,步步为营。像美帝那种短时间内从人造卫星都没有到把登月搞成过家家一样简单,太恐怖了!至今无法想象!
可上九天揽月,可下五洋捉鳖
祝取样圆满成功。
预祝嫦娥六号任务圆满成功
我们现在可以踏实的讲中华民族不但是走起来,还要健步如飞地跑起来!
看着简单,可实在是太复杂了![点赞]
中国高科技领先世界五百年
罗里吧嗦一大堆,早搞好等待回家了
太牛了
牛逼
中国几大营运商5G信号已经覆盖月球,其他国家人员进入需经中国🇨🇳海关囗岸办证进入
天之苍苍,其正色邪?月背新壤可适耕乎?天宫问天,让人类有机会一窥宇宙真正的秘密。嫦娥探月,则是吾辈向浩瀚的外太空进军的号角!月壤的成功获取,让我们真正有机会,去一探宇宙的秘密…能否成功的在月球建立前进基地?异域新土适不适合耕种是关键的一步!也是一个农耕民族灵魂最深处的执念…随着月背之壤的收取,人类之光,科技与未来,正被我炎黄之孙真真切切的握在手心里。 吾辈击水三千里,今日扶摇九万里…
月球是地球上最亮的地方
我老感觉月球圆的有点不正常,太圆了。[汗]
应该先发射若干硬着陆指示器,联网指引下降装置。
我也想飞到月球上,可是没钱。只能在太空上
这个是不是证明美国载人登月是真的了
即便你说中国有能力采用地形相对导航的高精度落月方式,但毕竟没有先于日本和印度使用,我们能不能步子迈得再大一点
牛
我们都要回来你却要给我看他没上去的猜测!