要说扫地机器人这件事,感觉就像早早早年间公司里一个程序员的故事了,先说这位小姐姐的段子,大家细品。
这是在2003年的时候,公司招了一个小姐姐在项目组里面写程序。当时还没有什么框架,就VB/VC的让程序员们硬写。这位小姐姐每次拿到需求后首先会画界面,将界面画得那叫一个漂亮规整,而且各种小的细节都会给你画得尽善尽美。要知道在20年前,很少有人关注界面美观程度,大部分软件项目只要能跑就可以过了。所以小姐姐的工作在当时还是很出众的。但问题是,这位小姐姐把80%的时间都花费在画界面上了,到真正写逻辑代码实现功能的时候我们发现她漂漂亮亮的程序连最基本的功能都难以完成……不是到dealline了没时间再做处理了,就是为了配合这些漂亮界面需要完成过多的逻辑。
最后,这位小姐姐试用期没有结束就被几个PM直接劝退了。
说回扫地机器人,这是一个超级内卷的领域。本来一个扫地机器人的最小框架就是三个电机一个碰撞开关和一个电池包。在工作的时候电池的电能进入左右两个轮子的电机让轮子旋转使扫地机器人获得向前运动的电力,当碰撞开关被前面的障碍物触发的时候断掉扫地机器人的一个电机电源暂停这台电机的旋转,这样没断掉电源的电机继续工作,扫地机器人由于左右轮的动力不同就可以实现遇到障碍物转向的功能;再有一个电机负责高速旋转驱动涡轮形成负压将地面上的污染物吸入集尘袋。
但是由于各种现实中的“需求”就将扫地机这种设备复杂化了。得自己充电吧,于是就带有了自动的充电坞;机器人得找得到充电坞吧,于是就弄了一大堆红外或者图像的识别系统让机器人归槽;家里有楼梯得让机器人防止跌落吧,于是就在机器人上放置了防跌落传感器;得高效清扫吧,于是机器人还得带上地图导航功能……
只不过功能需求这件事是由产品经理负责异想天开的由消费者买单的。在我们做正常的系统设计的时候往往会划出一个系统边界线,边界之外的事情不去管,着重于做好边界之内的事情,并不断优化就可以让产品不断迭代进入到一个相当优秀的等级范畴。扫地机也是这样,理论上是存在最优解形态的。只不过现在扫地机的厂商严重内卷,把各种功能都拼命的向小小的扫地机中塞进去,机器空间不够,于是就又塞到充电坞中……

这就很像iN提到的程序员小姐姐了,太过注重表面的形式化功能,以至于忽略了扫地机的真实存在意义。
有没有iN心目中在系统边界之内的完美产品呢?实际上还是有的。扫地机这个东西从2017年开始iN已经陆陆续续的买过5个了……除了担任办公室清洁的任务之外也会在自己家里使用。
在使用中就发现国产的扫地机器真的是不适合iN。

这有iN的特殊性,在大部分生活场景中iN会选择地毯通铺的,而且还会特地的选择长毛厚地毯,在踩上去的时候格外的舒适。但这件事对扫地机器人就有了额外的挑战。大部分扫地机器人在长毛高密地毯上几乎是不能走直线的。原因就是扫地机器人羸弱的小轮子很难抵偿地毯和扫地机器人下面接触所带来的阻力。
后来就直接用戴森了。这是前阵子一直的清扫组合:

和普通扫地机器人不同的是戴森的扫地机是以履带驱动的,别说是铺装好地毯或者地板的地面,就连装修过程中实际上也是依靠戴森的扫地机完成现场的大部分灰尘清理工作的。

只能说这东西很给力各种恶劣环境都能适应。在装修过程我家“彪子”可是吃了不少水泥灰……
无奈,任何产品都有老化的周期,在坚挺了几年后,彪子的功能就逐渐的老化了,最近发现效率降低,就有考虑换个扫地机器人了。
前阵子做换扫地机器人的功课,就有了开头的感慨。厂商太过于脑洞,什么功能都往扫地机器人里面放,例如拖地吧?拜托,俺家是通铺的地毯,有洗地机,并不需要在机器人清扫的过程中进行拖地操作。但在现在,似乎已经找不到一个只有扫地功能的扫地机器人了……
厂商的心态可以理解,别人有的功能自己怎么整也得怼进自己的产品中,别人没有的功能变着花样也得创造出来加到自己的扫地机器人中,这就造就了现在市场上的扫地机器人都是怪胎,样样精通但洋洋稀松。真正核心的扫地功能反而在次要的位置上了。扫地机器人不就是一个会自己规划路线的自动吸尘器吗?只要能在严苛的环境内完成最最最本质的吸尘功能就已经是最大的功德了,如果通过性再好一些这就是优秀的产品了!
选来选去选了一个在国内市场上几近消失的品牌,amazon黑五入手,前天到家。

要说功能吧,并没有国内的产品功能花哨,就仅仅是吸地功能,比起之前的戴森增加了一个集尘站,可以显著的降低清理灰尘的频次,毕竟如果是集尘盒式样的扫地机器人,受限于集尘盒空间的问题,清理集尘盒将成为日常不必要的一个工作负担。
而就扫地功能来说,这台机器却做到了一台扫地机器人本分的极致。

一台扫地机器人首先要求的就是是行走机制,在高密长毛地毯上,这台机器是可以走直线的,这就甩了很多国产机器人几条街。

很多人可能不理解,对于一个家里大面积是地毯的用户,能看到扫地机器人在地毯上走直线的那种欣快感,长达8米了路径上这东西丝毫没有扭捏,虽然不像是戴森利用履带驱动iN已经对机器人走“弯路”假设做了一些心理建设,但看到能走直线的时候依然觉得这钱花的值了。
购买irobot的产品实际上还有一个担心的地方,之前的i7普遍出现不能在国内连接APP的问题,想不到这次在j7上被完美解决了:


其次,是这次是真的视觉识别了,之前戴森的扫地机器人是依靠顶部的一个360度摄像机进行房间框架导航的。实际上这种模式是用来收集房间内的竖线信息进行的一个非标准策划,每次在路径规划的时候并不遵从房间的真实形态,仅仅是记录非碰撞状态下可以预期的行走路线。例如在戴森的APP内,我们就可以到看到房间的边缘信息是和机器人行走的白线相互拟合的。

虽然这种方式在算法上也可以一定程度的解决室内导航问题,但是这种方式的精度往往是不够的。有的时候iN的这个三室房间会被测量成很奇怪的形态。
而这一代的j7机器人则采取了预探地图的形式,在使用前需要先在屋子里跑一圈,实地测量一下房间的状态:

这个过程在J7的APP内称之为家居规划,在家居规划的过程中只要移除了地面杂物就可以让机器人先预览一下家庭状态,建立起来一个预览级别的地图。

在地图初步测量之后,我家的“伏地魔”给出了这样的一个地图:

这个地图可以在每次清扫房间的时候不断的添加细节,到今天已经两天了,机器人清扫了2次,地图就被更新为这个样子:
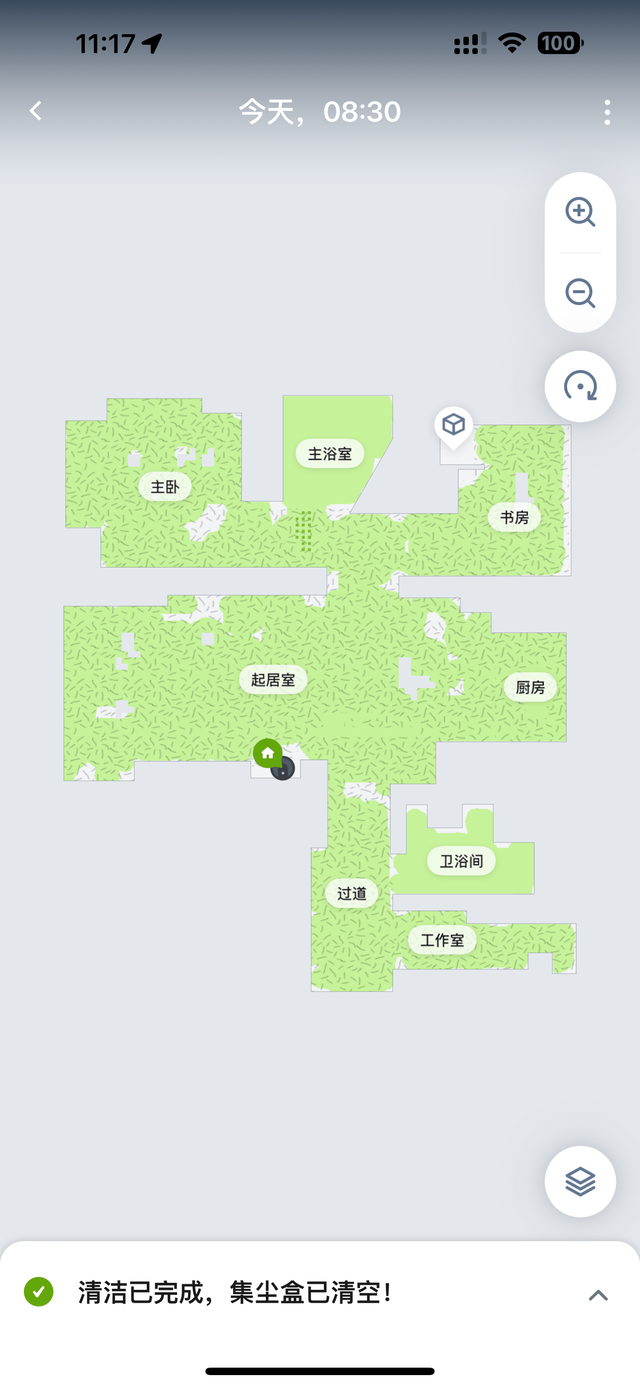
不仅仅是整体的家居布局已经更加清晰明了,而且通过传感器已经探测出地面的材质对于房间内的一些桌子椅覆盖的区域探测也完全没有落下。例如就餐区域:

这个部分是很多扫地机器人算法需要解决的难点地形,不仅仅是因为就餐区域的桌椅腿脚很多而且大部分的椅子腿是有方向性的,扫地机可以从侧边进入椅子下面,但很难从正面进入——正面的椅子腿间距稍小一些,会阻碍机器人行进路线。
在这种地形下就要考量机器人的地图构建算法和导航算法了,今天早上的清理发现,机器人已经不试图从椅子的正面进入椅子下面了。这种细节才是算法的精要。
由于是视觉识别,在机器人镜头的正下方还有一个LED照明灯,可以帮助机器人在家具的下面照明不好的空间内穿行:

路径照明对于视觉导航的扫地机器人十分重要。但iN觉得这里面还有算法毕竟镜头前的LED照明空间极其有限,很难照射到远处的墙面,因此这种照明在机器人的导航系统里仅仅可以提供一个小切片,让机器人可以识别出更细致一层的导航标定点。能做到这一点对于irobot这种老牌的机器人公司来说不是一件难事,但对于一个普通的没有底蕴的新兴扫地机器人品牌来说则是一个很大的挑战。
再有就是对于地面忽然出现的或者是活动的物体识别:

今天就识别到了写字台边上的转椅,和之前的位置不同。于是就可以触发障碍物审核的操作:

由于只是一个椅子腿,直接告诉此处无障碍物即可。后期清理的时候这片区域还是会被清理干净的。
这是irobot的一个保障技术,主要让机器人识别地面上的物体。知道扫地机最酸爽的是什么吗?压上家里的宠物的粪便。由于扫地机的工作特性,并不趋向于将粪便收集到尘盒里面,而是会把粪便捻薄在房间里涂匀。

正所谓“发粪涂地”。在避障,尤其是避“屎”的问题上早期的irobot问题很严重,但到了现在这一代从官方说就是升级了算法,如果还避不开屎,不用清理机器人,直接拿到售后换新。

最后说下核心功能——扫地:
因为是日常使用,iN也就不找什么瓜子皮面条什么的做极限测试了,就从清扫过的地面拍个照片而已吧,家里平时就维护的比较干净,地面上基本上也没有什么污垢。

整体的表现就是地毯清理干净没有可见的碎屑物,上面的长毛都被吸的立起来,这样地毯踩上去才舒适。
一次清扫的实际面积为43平米,清扫时间1小时19分钟。

通常设置在8:30开始清扫,大约10点前可以完成所有的清扫工作,清扫结束后余下30的电量。
对了,另一个要说一下的细节就是集尘站,这是目前能找到的带有最小集尘站的扫地机器人,在家里摆放几乎不需要额外的空间。同时,集尘站的盖子设计的很棒,盖口部位设置了一圈胶条,可以有效的封闭集尘站内的尘土。

这点设计,在很多厂商的设计中并不存在,算是一个加分项目。
