触觉,作为人类感知外界并与之互动的重要方式,赋予了人类以辨识物体多重特性(诸如纹理、硬度、可塑性及重量)与捕捉微妙线索(例如感知心跳或精准定位动脉振动)的能力。这一感官机制不仅深化了人类对周围世界的理解,还促进了与环境的精细互动。

近年来,触觉反馈技术在多个领域展现出了前所未有的应用潜力,特别是在医学、远程控制、娱乐及教育培训中。这项技术巧妙地模拟了真实触感,使用户即便身处千里之外,或面对仅存在于虚拟世界的对象,如动物模型与病变器官模拟,也能仿佛进行直接交互。它不仅拓宽了人们体验罕见或难以接触情境的渠道,如与野生动物或水下生物的互动、罕见疾病的诊断训练,还显著提升了工作的精确度与安全性,尤其在触诊等高标准任务中表现突出。此外,触觉因其对社会联系的强化作用,也成为了科学研究的重要议题。
然而,由于触觉的多面性,触觉设备开发中仍存在一些挑战与痛点不容忽视。如何提升触觉反馈的保真度,以提供更加真实、多样化的触觉体验?如何确保设备的可穿戴性,从而有效地向指尖传递精确的触觉刺激?这些问题已成为当前研究亟需解决的关键问题。
▍提出仿生自适应多平面触觉系统,实现机械与振动双重感知结合
针对这些挑战,来自英国伦敦大学、厄瓜多尔洛哈国立大学、英国布莱顿萨塞克斯大学以及英国伦敦大学学院皇后广场神经病学研究所的研究人员,携手开展了一项创新研究,并提出了一种名为“仿生自适应多平面触觉系统”的新型设备。
该系统能够同时提供机械触觉/稳定刺激与振动触觉脉冲刺激,且强度和频率均可调节,分别最高可达298.1 mN与130 Hz。尤为重要的是,该系统能够实现对多个指尖区域的同时刺激,极大地丰富了触觉反馈的层次与细腻度。为了验证该设备在探索人类触觉方面的潜力,研究团队进行了人类刺激敏感性与分化实验,全面评估了其在传递机械振动触觉、可变强度刺激、同步多平面刺激以及操作员无关刺激方面的性能。这一创新系统不仅有望加速触觉感知设备的研发进程,还为触觉相关疾病的研究与诊断提供了无痛、独立于操作员的数据支持,具有深远的科学意义与应用价值。

前不久,该研究相关成果以“Bioinspired adaptable multiplanar mechano-vibrotactile haptic system”为题,发表在权威期刊《Nature Communications》上。接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍两大组成部分构建触觉盛宴,赋予高度个性化安全高效触觉体验
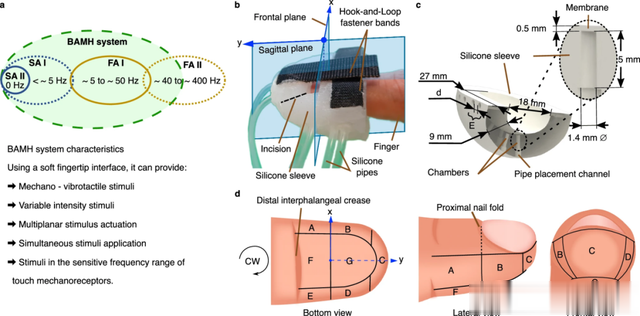
仿生自适应多平面机械振动触觉(BAMH)系统,作为一种创新的气动驱动软材料机器人界面,巧妙地融合了软材料、硅胶基结构、气动驱动技术。该系统主要由电动气动控制子系统和柔软的指尖界面两大部分组成。具体来说:
电动气动控制子系统
控制子系统构成了BAMH系统的中枢,担当着精确调控触觉刺激输出的重任。它由一系列电动和气动元件组成,这些元件协同工作,能够灵活生成并调节多种触觉刺激模式。该子系统不仅提供稳定且可调的机械触觉与振动触觉脉冲刺激,以满足不同场景下的应用需求,而且其振动频率最高可达280Hz,这一频段恰好覆盖了与人类触觉感知紧密相关的四大机械感受器的敏感范围。此外,通过0kPa至300kPa的宽广压力输出范围,实现了对刺激强度的精细调控,以适应不同用户的个性化敏感度。尤为值得一提的是,该子系统能够同时刺激手指的七个不同区域,且每个区域均可独立设定如频率、振幅等刺激特性,从而为用户提供高度定制化的触觉体验。借助先进的控制算法,该系统确保了刺激输出的稳定性与一致性,即便在长时间使用中也能保持卓越的性能表现。

指尖界面
指尖界面作为BAMH系统与用户直接互动的桥梁,其设计充分考虑了人体工学、材料科学以及刺激传递的效率等因素。该界面由硅胶套、精密内腔以及钩环紧固带三部分巧妙组成,能够紧密贴合用户手指,确保触觉刺激的有效传递。指尖界面采用柔软的硅胶材料,可提供与用户皮肤的舒适接触体验,同时减轻长时间使用可能带来的不适。其内腔设计内置了十四个独立且气密性良好的腔室,这些腔室成对分布于手指的七个区域,不仅提升了刺激传递的均匀性,还赋予了系统根据具体应用需求灵活调整刺激模式的能力。钩环紧固带的设计则确保了指尖界面在用户动态使用过程中的稳定性,防止因手部动作而脱落或移位。界面材料选用Dragon Skin™ 20 Smooth On,这一选择基于其卓越的触觉刺激传递性能以及与用户皮肤的高度兼容性,进一步提升了用户的整体体验。
▍界定腔体内压力与施加力动态关系,助力人类触觉深入研究
凭借其精准的触觉刺激特性,BAMH系统成功界定了腔体内压力与施加力之间的动态关系,为触觉研究开辟了新的道路。为展示BAMH系统卓越性能,研究团队采用与指尖界面制造工艺相仿的扁平样品,进行了一系列精密的实验测试。
在稳定/机械触觉刺激的表征方面,系统加载时所需的最小平均力仅为1.72 mN,而最大平均力则高达298.1 mN。这一宽广的力范围使得系统能够模拟出多种触觉体验。同时,系统还展现出17.21 mN的滞后性和1.57 mN的平均分辨率,确保了刺激的精准度和细腻度。

在评估系统长期性能时,研究人员发现基准数据与后续测试数据的均方根偏差(RMSD)保持在较低水平,这表明BAMH系统具有出色的稳定性和可靠性。然而,不同平板样品之间的性能差异也引起了研究团队的关注。这可能是由于指尖界面制造过程中的手动步骤导致的行为变化,因此每个指尖界面均需进行初始校准以确保数据的准确性。
对于振动触觉脉冲刺激的表征,BAMH系统同样表现出色。在相同内腔压力下,施加的力低于稳定刺激所对应的力,这使得系统能够更加高效地传递振动刺激。此外,随着管道长度的增加,力范围相应减小,但系统仍然能够保持较高的刺激强度。统计分析进一步证实了管道长度和占空比对最大频率的显著影响,为系统的优化提供了有力支持。

值得注意的是,BAMH系统还能够同时刺激慢适应机械感受器和快速适应机械感受器,特别是在超过120 Hz的高频段。这一能力使得系统能够以128 Hz有效刺激FAII机械感受器,为深入研究人类触觉提供了有力工具。此外,系统采用的Dragon Skin™ 20作为柔软指尖界面材料,不仅提供了舒适的触感,还确保了刺激的高效传递。
研究团队表示,BAMH系统的独特优势在于其能够提供可变强度、多平面及同时的机械振动触觉刺激。通过调整压力调节器或驱动阀的开关频率和占空比,研究人员可以灵活地调节刺激强度,以满足不同实验需求。这一特性使得BAMH系统成为深入研究人类触觉的理想工具。
与现有触觉反馈系统相比,BAMH系统不仅在性能上有所提升,还在应用上展现了更广阔的前景。
目前,该研究团队已经利用该系统及手持设备对人类手指的刺激敏感性和分化进行了深入研究。具体来说:
在敏感度分析中,研究人员发现手指指腹是敏感度最高的区域,而手指前部的敏感度相对较低。同时,BAMH系统与手持设备的敏感度结果呈现相关性,特别是在高于60 Hz的刺激频率下。这一发现强调了拥有能够独立且同时在手指不同区域提供多平面、可变强度和频率刺激的触觉系统的重要性。

在刺激分化分析中,研究发现触觉空间分辨率在各个区域和手指间存在差异,指腹是触觉空间分辨率较高的区域之一。手持设备与BAMH系统的刺激分化结果均证实了区域间差异的存在,但BAMH系统减少了操作员的偏见,提高了数据的可靠性。

研究结果显示,本研究创新性地提出的BAMH系统,不仅在精准激活手指各区域触觉机械感受器方面展现出显著优势,还有望凭借其广泛的覆盖范围、高度的模块化设计以及便携性特征,成为神经科学、心理学、社会学等多个学科领域探索人类触觉机制的重要工具。更进一步,该系统成功实现了对人类手指远端指骨敏感度和刺激分化的量化评估,可为临床医生提供客观、精确且不受操作员影响的灵敏度与刺激辨识数据,这对于触觉功能丧失等相关疾病的评估与监测具有极其重要的价值。此外,BAMH系统凭借其出色的多功能性,后续有望在遥控操作、虚拟通讯、虚拟现实及增强现实等领域显著提升触觉反馈效能,进而对社会交往、医疗健康、教育等多个层面产生广泛而深远的影响。
展望未来,研究人员将进一步深入了解人类触觉领域,包括研究指尖界面个性化、性别、环境/社会背景以及刺激的位置、类型、强度和应用时间如何影响刺激感知。同时,将拓宽振动触觉脉冲反馈的频率范围,提高触摸模拟保真度,并整合其他反馈模式以增强用户的沉浸感和体验。
参考文章
https://www.nature.com/articles/s41467-024-51779-8#author-information
