超螺旋聚合物(supercoiled polymer, SCP)作为一项前沿技术,尽管具有广泛的应用前景,尤其是在构建人造肌肉方面,其研究仍面临诸多挑战。SCP的制备不仅需要复杂的材料选择和组合,还必须精确控制扭卷过程及热处理工艺,以形成类似弹簧的螺旋结构。虽然由镀银聚合物纤维制成的SCP人造肌肉已经展示了电阻与长度变化的相关性,展现出其作为柔性应变传感器的潜力,但当前的制造工艺仍不成熟,特别是在针对传感器应用的专项工艺方面。同时,也缺乏对于SCP传感机制的深入理解。
▍提出SCPS,实现制造工艺简化与传感性能提升
对此,来自华南理工大学吴贤铭智能工程学院的周奕彤副教授研究团队的研究人员进行了深入研究,提出了一种新型柔性超螺旋聚合物传感器(Super Coiled Polymer Sensor, SCPS)。该传感器不仅简化了制造工艺,更在传感性能上实现了显著提升。研究团队通过深入剖析SCPS在拉力作用下的力学与电学响应,揭示了其传感机理的核心——宏观拉力使SCPS中的前体纤维扭曲度增加并使其中的大量细丝拉伸,从而有效地增加了电流的流通路径,进而增大电阻。借助扫描电子显微镜的先进手段,研究团队展现了SCPS的微观结构。同时,研究团队设计了一系列严谨实验就传感器的卓越性能进行全面验证评估。
实验结果表明,SCPS的制造流程既简洁又高效,采用商业化银镀尼龙线作为基材,显著降低了生产成本,为其大规模应用奠定了坚实基础。同时,该传感器在25%的应变范围内展现出高线性度(R² = 0.96)和低迟滞(5.3%)特性,响应时间更是小于100毫秒,充分显示了其在实时监测中的巨大潜力。此外,该传感器能够在快速拉伸和复杂运动中保持良好的稳定性和重复性,这进一步拓宽了其应用范围。
值得一提的是,研究团队还利用四个SCPS单元开发了一种手势识别数据手套,成功实现了对八种不同手势的准确识别,准确率达到95%。这一成果不仅展示了SCPS在智能设备领域的广阔应用前景,,也为未来的医疗健康监测和人机界面技术等未来科技提供了全新的解决方案。

图1:论文发表信息
该研究成果的相关论文已以“Supercoiled Polymer Sensors from Twisting and Coiling Silver-Plated Nylon Threads”为题发表在《IEEE Sensors Journal》上。戴沛为第一作者,王鹏宇(广东技术师范大学)、甘露为共同作者,周奕彤副教授为通讯作者。华南理工大学吴贤铭智能工程学院为论文的第一作者和通讯单位。
那么该研究成果具体内容如何呢?接下来,一起来和机器人大讲堂进行深入探索!
▍SCPS的传感原理
本研究提出的 SCPS 双螺旋结构由两个单螺旋结构缠绕而成。前体纤维(Precursor fiber)由大量镀银尼龙细丝(Filament)组成,与螺旋原丝纤维的缠绕方向相同。在所述的制造过程中,SCPS 的单螺旋结构与这些最细纤维丝的缠绕方向对齐,从而形成一个同手性结构。
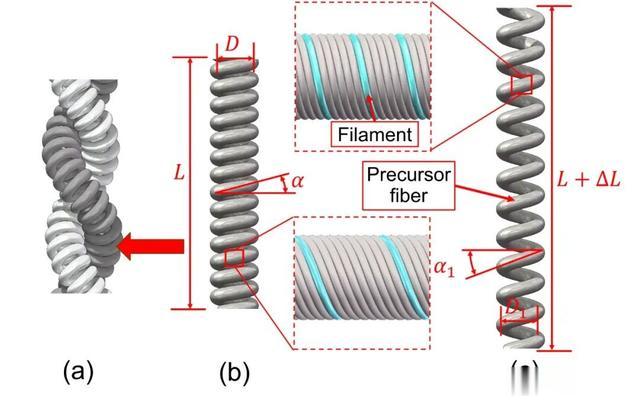
图2:SCPS 示意图。
在拉伸 SCPS 的单螺旋线圈时,前体纤维的长度变化可以合理地忽略。固定线圈以防止端部旋转并施加拉力会导致纤维扭曲变化,即

其中,

分别代表每单位初始纤维长度的纤维捻度变化、线圈圈数、线圈长度变化和线圈中的前体纤维长度。由于

和

具有相同的符号,该公式揭示了对于两端固定的 SCPS,线圈长度的增加会导致纤维捻度的增加。捻度增加的现象可以解释如下。
在拉伸SCPS的单螺旋结构时,作用于前体纤维任意截面的扭矩可以根据弹簧力学表达为:

其中,

是前体纤维的扭转刚度,

和

分别是拉伸SCPS之前和之后的螺距角,

和

分别是拉伸前后 SCPS的线圈半径。
由于弹簧的张力导致螺距角增加,弹簧半径减小。这与当螺距角小于45°时,

随螺距角增加而增加的事实相结合,表明扭矩在广泛的螺距角范围内单调增加。此扭矩是在单螺旋弹簧张力下增加前体纤维扭曲的原因。
这也产生了一个有趣的现象,即在单螺旋结构的拉伸过程中,前体纤维的螺距角增加,而构成前体纤维的细丝的螺距角减小。前体纤维中的捻度增大导致细丝发生相当大的长度变化。其中,在绞线导体中,导电细丝之间的接触电阻导致一些电流沿细丝轴螺旋流动,而不是直接沿导体轴流动,如图的蓝色细丝所示。SCPS的张力增加了前体纤维的扭曲并拉长了细丝,有效地增加了电流流动距离,从而增大电阻。
▍单个传感器成本≤7元,SCPS的选材与制造
为兼顾生产过程中的成本效益与制作便捷性,超螺旋聚合物传感器(SCPS)的制造优选了市场上广泛可得的镀银尼龙线(规格为235/34 1x2 HC+B,由知名供应商Shieldex提供)。借此选材策略,仅需约1000毫米的镀银尼龙线,即可高效制作出长度为100毫米的SCPS,从而成功将单个传感器的制造成本控制在7元以内。SCPS的详尽制造步骤如图3清晰展示:

图3:SCPS的制造过程。
研究团队首先持续对悬挂负载的镀银尼龙线进行加捻,当达到特定程度时,线材会产生自然卷曲,形成类似弹簧的结构。一旦完全卷绕成螺旋状,电机便停止工作。随后,研究人员在纱线的中点悬挂重物,并将其对折。纱线内部残留的应力会驱动重物旋转,进而形成稳定的双螺旋结构。这一关键的折叠步骤对于传感器的性能至关重要,因为它所产生的双螺旋结构赋予了SCPS出色的结构稳定性。
接下来,研究人员将卷曲的两股纱线拉伸至原长度的110%,并在180°C的烤箱中恒温放置两小时,以固定传感器的形状。之后,使用铜管牢固地固定两股盘绕纱线的两端,确保在后续的实验中能够保持稳定的电气连接。此外,为了进一步提升传感器的一致性,再利用Mark-10拉伸试验机对其进行了30次预训练,每次拉伸至原长度的140%。
通过上述精心设计的制造流程,研究团队最终生产出了具有卓越稳定性和可靠传感能力的SCPS。
▍更高线性度、更低滞后性,SCPS应变传感性能评估
为了全面评估超螺旋聚合物传感器(SCPS)的应变传感性能,研究团队开展了一系列拉伸试验。
如图4(a)所示,每个长度为100毫米的SCPS样本均在25%的应变区间内接受了测试,并展现出了近乎线性的变化规律。为了深入探究SCPS的应变检测极限,研究团队进一步实施了小拉伸应变测试,涵盖了1.0%、2.0%、4.0%及6.0%的应变水平。如图4(b)所示,SCPS在2.0%至6.0%的拉伸应变范围内展现出了稳定且有效的响应,甚至在最小拉伸应变1.0%时亦能产生可靠的反应。

图4:SCPS的实验传感性能。(a)线性拟合曲线和多项式拟合曲线的SCPS电阻变化率。(b) 对SCPS加载周期性小应变,应变分别为6%、4%、2%和1%。
此外,研究团队还深入研究了SCPS在高速拉伸及不同应变条件下的单次响应表现。图5(a)揭示了SCPS在2%应变范围内电阻的快速响应能力,所有响应延迟均控制在100毫秒以内。图5(b)则通过展示不同应变下的重叠曲线,即抗性变化率(抗性变化斜率),凸显了SCPS的一致性。同时,电阻变化在不同应变下保持恒定,进一步彰显了传感器卓越的稳定性。
如图5(c)所示,为了验证传感器的可重复性,研究团队还对五个SCPS样本进行了加载与卸载周期的测试。值得注意的是,五个周期的电阻响应曲线高度重合,这表明其在多个周期内性能稳定一致。经计算,重复性达到了5.9%的优异水平。图5(d)显示了SCPS从自然状态至断裂状态过程中电阻随应变的变化率。尽管当应变超过约35%时,电阻出现较大波动,但在失效之前,电阻的整体变化趋势仍保持线性。同时,为了评估SCPS的长期性能,研究团队也对SCPS样品进行了400次加载和卸载试验,并设定应变为10%,速度为200 mm/min。结果如图5(e)所示,所提出的SCPS在多次循环测试中表现出总体上良好的重复性和一致性。

图5:不同应变下SCPS的实验结果。(a)三种快速拉伸速度下SCPS的电阻变化率,应变为2%。(b)拉伸速度为200mm/min时,SCPS对不同应变的电阻变化率。(c)相同条件下,5个加载和卸载循环下SCPS的电阻变化率。(d) SCPS从自然状态到断裂状态的电阻变化率和负载。(e)在10%应变下,SCPS在400次加载和卸载过程中的电阻变化率。
为了探究放置时间对SCPS传感性能的影响,研究团队在实验室环境中对一个SCPS样本进行了为期四个月的放置测试。如图6所示,尽管贮藏四个月后SCPS的迟滞量略有增加,但电阻-应变曲线的整体趋势变化不大,且线性拟合线极为接近。放置后,SCPS的线性度还略有所提升,R²值从0.96增加至0.975。

图6:SCPS在自然环境中放置4个月后与初始状态的电阻变化率-应变曲线及线性拟合曲线对比。
最后,为了与其他SCPS研究成果进行对比,研究团队根据既有工艺制造了多个SCPS,并在图7中对其电阻变化率进行了比较。结果显示,研究团队所提出的SCPS具有更高的线性度、更低的滞后性以及更小的波动,充分证明了所提出制造方法的有效性。

图7:不同制作方法的SCP传感器的电阻-应变曲线。(i)使用与Bombara等提出的SCP传感器相同的前驱体纤维、结构和缠绕方法制成的SCPS,不经过热处理。(ii)本研究提出的SCPS,保持所有其他生产步骤一致,但没有热处理。(iii)采用类似于Sun等的芯棒卷取方法制作的SCPS。(iv)本研究提出的SCPS。
▍开发手套识别系统,探索SCPS实际应用潜力
为了直观展示SCPS作为应变传感器的实际应用潜力,研究团队设计并开发了一套手势识别系统,其具体配置如图8(a)所示。系统核心组件为一只集成了SCPS的数据手套,该手套巧妙地将传感器连接于拇指、食指、中指及无名指上,以精准捕捉手指动作。针对每个手势,研究团队系统性地记录了50次数据,累计收集了400个手势样本,为后续的识别分析奠定了坚实基础。图8(b)呈现了每个手势下各手指对应的代表性电阻变化曲线,这些曲线反映了不同手势中手指的独特运动轨迹,为手势识别提供了丰富的特征信息。
随后,研究团队运用机器学习方法对单个手势进行了精确分类。在数据采集完成后,研究人员采用主成分分析(PCA)技术对数据进行了高效降维处理,这一步骤显著提升了机器学习的处理速度和效率。利用独立的测试数据集对分类器性能进行严格评估,最终实现了高达95%的分类准确率,充分验证了分类器的高效能。
为了更进一步验证SCPS在手势识别领域的实用性,研究团队依托数据采集系统成功部署了已训练好的分类模型。用户佩戴数据手套时,其手指动作产生的实时数据通过高精度的电阻采集器即时传输至笔记本电脑。这些数据经过与训练数据库中信号相同的预处理流程后,首先通过主成分分析法提取出占总方差97.5%的关键特征。随后,这些特征被作为机器学习的输入,训练后的分类器据此迅速识别出用户当前执行的手势,并将识别结果以手势图像的形式实时显示在笔记本电脑屏幕上。整个手势识别系统的实际操作流程及演示效果如图7所示。

图8:(a)集成了四个scps的手势识别手套系统;(b) 不同被测手势及其对应的SCPS各指电阻变化。
▍关于未来
关于未来研究,团队将重点聚焦于几个关键领域:首要任务是深入进行传感机制的建模与验证工作,力求精准把握SCPS传感器的运作机理。与此同时,团队也将就热处理对SCPS传感器传感性能的影响进行更进一步研究,以期全面优化其性能表现。
将SCPS技术巧妙地融入智能纺织品中,可打造出具备高度智能化特性的可穿戴衣物,为用户带来全新的穿戴体验。这一创新举措不仅将拓宽SCPS的应用范畴,更有望引领智能穿戴设备领域的革新潮流。
此外,研究团队也计划深入挖掘SCPS在同时传感与驱动方面的潜力,探索通过自感知技术实现人工肌肉的高效驱动控制,以期在软体致动器和传感器技术领域取得变革性突破。
文章详情:Dai, Pei, Pengyu Wang, Lu Gan, and Yitong Zhou*. "Supercoiled Polymer Sensors from Twisting and Coiling Silver-Plated Nylon Threads." IEEE Sensors Journal (2024). https://ieeexplore.ieee.org/document/10638470
