文 | 伯朗特机器人中心
工业机器人是当今自动化制造行业的“扛把子”角色,打磨、喷涂、搬运、焊接、涂胶……等等生产制造的场景都少不了他们的身影。那我有个问题?是什么让他们的动作如此丝滑,直行、转弯、上下等动作都不在话下。换个问法:是什么程序让机器人知道下一步该往哪里走?
答案就是:运动指令。
要让机器人动起来,给我的感觉就像是盖房子,盖房子之前要搞清楚房子的结构逻辑,才能撑起高楼大厦。而运动指令就是机器人动起来的底层逻辑,让我们知道它动起来,也清楚它为什么能动起来的逻辑。
运动指令是机器人编程的核心工具,用于控制机器人的移动。它在实现精确控制和高效操作方面具有至关重要的作用。这些指令不仅决定了机器人的运动轨迹、速度和加速度等参数,还直接影响到机器人在各种应用场景中的表现。
▶▶ 机器人常见的五个指令
首先需要说明的是,由于不同品牌的机器人所用的程序也不尽相同,所以每款机器人所应用的运动指令的名字也有所不同,这里主要是以“伯朗特机器人”举例。
1.自由路径(Free Path):指令类型是“关节运动”
以关节插补的方式移动到示教的位置,各关节按照设定的轴速度×路径速度×速度倍率进行运动。它允许机器人的关节以插补的方式移动到预先设定的示教位置。在这个过程中,每个关节的运动速度是根据设定的轴速度、路径速度和速度倍率来确定的。这种运动方式可以确保机器人在到达目标位置时,其路径是平滑和准确的。

●下一位置:基于关节坐标,设入当前关节坐标或者手动输入的关节坐标数值
●平滑:0~9共有10个平滑等级,0时无平滑
●延时:当路径中存在延时,光标移动到此行机器人会等待n(n为设定的时间,单位s)秒再动作

图为自由路径的轨迹:点与点之间只存在角度运算关系,轨迹为弧线
2.姿势直线(P Line 3D-Pose):指令类型是“直线运动”
以直线插补的方式进行移动至示教位置,各关节按照最大线速度×路径速度×速度倍率进行运动。也就是说,它指定机器人沿着直线路径移动到预设的位置。
在执行这个指令时,机器人会使用直线插补的方式进行运动,意味着它会以直线的方式从当前位置移动到目标位置。在这个过程中,每个关节的运动速度会根据最大线速度、路径速度和速度倍率的乘积来确定。这样可以确保机器人在保持直线运动的同时,也能按照设定的速度参数安全、准确地到达目标位置。

●下一位置:基于世界坐标,设入当前世界坐标或者手动输入世界坐标数值

轨迹特点:点与点之间按照直线插补的运动方式,减速比、连杆参数(各个关节和连杆的尺寸、形状、角度等参数)、原点都会对轨迹精度产生影响。

由上图可见,平滑会影响轨迹的精度,当路径中存在平滑时,机器人会提前做过度处理,减少因加速减速定位时间等因素造成的延时,使轨迹看起来顺滑。
3.姿势曲线(Curve3D-Pose):指令类型是“曲线运动”
用圆弧插补的方式移动到示教位置。各关节按照最大线速度×路径速度×自动倍率运行,三个点确定一条圆弧,如果要保持姿势走圆弧要建立工具坐标系。为了完成一个圆弧形状的移动路径,需要至少三个点来定义这个圆弧。如果在移动过程中需要保持机器人的特定姿势(即工具的姿态),则需要建立一个工具坐标系。

●下一位置:基于世界坐标,设入当前世界坐标或者手动输入世界坐标数值,作为圆弧的中间点
●结束位置:设入当前世界坐标或者手动输入世界坐标数值,作为圆弧的结束点

轨迹特点:三点组成一条圆弧,连续圆弧时前一条圆弧的终点作为后一条圆弧的起点,对工具坐标有要求。
4.姿势整圆(P Circle):指令类型是“整圆运动”
用整圆插补的方式实现画一个完整的圆。整圆插补是一种编程中的运动控制技术,用于生成圆弧或圆形的运动轨迹,确保工具沿着精确的圆形路径移动,常用于制造和加工领域。各关节按照最大线速度×路径速度×自动倍率运行,分为三点画圆法和圆心画圆法。
三点画圆法:这是一种通过指定圆上的三个点来确定圆弧轨迹的画圆方法。通过这三个点,系统可以计算出圆的中心和半径,从而实现圆弧的精确绘制。
圆心画圆法:这种方法是直接指定圆心和半径来绘制圆弧的方法。它允许用户通过定义圆心位置和半径大小来控制圆弧的形状和位置。

三点法画圆
●姿势直线下一位置:基于世界坐标,设入当前世界坐标或者手动输入世界坐标数值,作为圆上的第一个点
●360°姿势整圆:基于世界坐标,设入当前世界坐标或者手动输入世界坐标数值,作为圆上的第二个点
●结束位置:基于世界坐标,设入当前世界坐标或者手动输入世界坐标数值,作为圆上的第三个点

轨迹特点:在一个平面圆上取三个点,可以确定一个圆,无需确定圆心和半径。

圆心法画圆
●圆心:基于世界坐标,设入当前世界坐标或者手动输入世界坐标数值,作为该圆的圆心
●P1:基于世界坐标,设入当前世界坐标或者手动输入世界坐标数值,作为该圆的起始参考点
●P2:基于世界坐标,设入当前世界坐标或者手动输入世界坐标数值,确定该圆的的平面参考点
●半径:对圆的大小起决定性作用,数据大小会影响画圆起始点
●顺/逆时针:决定该圆的画圆方向
●结束退回圆心:勾选后画完圆机器人将返回圆心,默认不返回
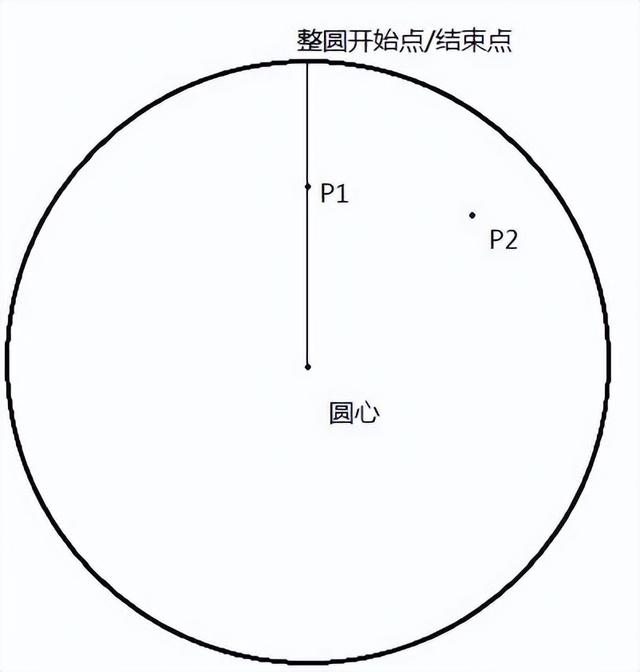
轨迹特点:首先确定圆心,P1和P2只作为参考点,半径决定圆的大小。
5.相对关节(Offset Jog):指令类型是“相对关节运动”
以关节插补的方式进行运动,,机器人会根据其上一个位置的关节角度,计算出相对于那个位置的新的关节角度来移动。完成这个运动后,机器人会到达一个新的位置,并在那里停止。

在动作菜单中选择“路径”,接着选中“自由路径+相对”,点击“输入终点”,进入坐标输入页面,例如J1轴相对于前一个位置向J1+方向移动20度,如图所示,输入坐标后点击“确定”即可。


最后插入至程序即可,如下图:

6.相对姿势直线(PO Line 3D):指令类型是“相对直线运动”
以直线插补(沿着两点之间最短的直线路径进行运动控制的一种技术)的方式进行移动,相对于上一个位置保持当前姿势走直线,到达位置后结束,入动作菜单后,同样选择“相对”+“姿势直线”,然后点击“输入终点”图标后,进入坐标设置页面,如图:

设定移动位置时,应采用相对坐标。(例如:若需从当前位置沿X轴负方向移动50毫米,仅需在X轴栏位输入-50。Y轴和Z轴的设定方法亦相同,区别仅在于移动的方向。只需在坐标栏位输入相应的正负数值,即可明确移动方向。)
▶▶ 二、影响指令速度的三个因素
在了解了机器人运动指令的基础知识之后,我们已经对机器人如何根据不同的指令进行精确移动有了初步的认识。然而,为了使机器人的动作更加流畅和高效,我们还需要掌握影响这些指令速度的三个关键因素。这些因素包括轴速度、路径速度和速度倍率,它们共同决定了机器人在执行任务时的动态表现。
1.轴速度
是指机器人各个关节轴在单位时间内能够达到的最大速度。它决定了机器人关节运动的快慢,是影响机器人运动速度的基础参数。
举个例子更好理解一点:假设一个工业机器人的某个关节(比如,机器人手臂的肘关节)的最大轴速度是180度/秒。这意味着该关节在完全不受其他限制的情况下,可以以每秒180度的速度旋转。每个机器人的参数不一样,具体我们可以在产品技术推荐书中查询了解具体机型的轴速度。
2.路径速度
路径速度指的是单条路径程序行里面设定的速度倍率。可以理解为机器人在走一条轨迹时,这条轨迹上轴速度的百分比。在编写路径程序的时候,我们可以根据实际需要修改路径速度,以实现不同的运动效果。
比如,现在编程一个机器人程序,其中某条路径指令要求机器人沿着一个特定的轨迹移动。如果路径速度设置为50%,那么机器人在执行这条路径时,其关节的实际运动速度将是轴速度的50%。例如,如果肘关节的轴速度是180度/秒,那么在路径速度为50%的情况下,肘关节的实际运动速度将是90度/秒。
3.速度倍率
这是是一个调节参数,它允许操作者根据实际需要调整机器人的运动速度。通过改变速度倍率,可以在不改变轴速度和路径速度设定的情况下,快速调整机器人的运动速度,以适应不同的工作环境和任务需求。
它是机器人整个速度的百分比。我们可以点击示教器左上方对其查看。像伯朗特机器人的出厂设置默认是10%,也就是机器人的轴速度的10%。这个速度倍率可以根据实际应用场景进行更改,以适应不同的生产需求。假设伯朗特机器人的出厂设置速度倍率为10%,并且该机器人的某个关节的轴速度是180度/秒。如果在实际应用中,我们发现需要更快的运动速度,我们可以将速度倍率调整为20%。这样,该关节的实际运动速度将是轴速度的20%,即36度/秒(180度/秒 * 20%)。
4.轴速度、路径速度和速度倍率,共同决定了机器人实际运行速度。当我们想测量机器人某个关节或直线运行的实际速度时,可以用【最大速度 * 路径速度 * 速度倍率】这个公式进行测算。如果我们要测量机器人肘关节在一条特定路径上以速度倍率20%运行时的实际速度,我们可以使用公式【最大速度 * 路径速度 * 速度倍率】进行计算:
180度/秒(轴速度)* 50%(路径速度)* 20%(速度倍率)= 18度/秒。这意味着肘关节在该路径上的实际运动速度是18度/秒。
通过理解这些运动指令和影响速度的因素,我们可以更精确地控制工业机器人的动作,从而提高生产效率和质量。掌握这些基础知识,对于任何希望在自动化制造领域取得成功的工程师或技术人员来说,包重要的。
