近年来水下仿生机器人被更多地应用到水下清洁、生态调查、资源勘探以及救援等任务当中。由于其独特的结构设计,实现与生物相似的高机动性,因而水下仿生机器人被市场高度关注。然而,传统配备螺旋桨的水下机器人在强水流环境中面临海洋生物缠绕和环境破坏的问题,因此,如何基于生物仿生性打造一款兼顾刚软特性的水下机器人成为研究人员探讨的方向。
近日日本东京电气通信大学,东京工业大学以及名古屋名城大学研发团队打造了一款基于连续体直驱的自主仿生水下仿生鱼,该仿生鱼能够以每秒6.3倍体长的高速游泳,并以110毫秒内实现约90° 的旋转,角速率为1450°/s,产生了类似鱼类的形态变化和快速游动,且拥有极高的机械鲁棒性。
▍为何采用直驱技术方案?
研究人员表示,水下仿生机器人根据其架构大致可分为两类,即刚性机器人方法和软性机器人方法。刚性机器人方法使用电磁电机或伺服电机及其相关的刚性传动部件作为主动移动体来产生游泳动作,具有易于集成、高能量密度、高效率、定位准确和频率响应快等优点。然而,传动机制(包括齿轮、曲柄、滑块、铰链、连杆和导线)的存在增加了机器人结构的复杂性,使其易受严重冲击损坏,从而可能损害机械鲁棒性。
直驱水下仿生鱼
软性机器人方法则利用软性致动器(如电活性聚合物和流体驱动的软性致动器)作为身体的一部分或全部,并通过与周围水的相互作用实现自动生成的游泳动作。这种方法简化了控制输入,提高了结构的机械鲁棒性。然而,许多软性致动器技术面临响应速度慢、效率低和能量密度低、变形和力输出小等挑战。
为此研究团队提出直驱方法通过电机直驱柔性连续体,消除了对传动部件的需求,从而简化了结构并提高了输出性能和机械鲁棒性。直驱的优势在于能够使电机通过身体与周围水直接相互作用,这有助于简化传统电机驱动水下机器人所需的复杂控制。目前直驱方法已在陆地机器人中得到了验证,但在仿生水下机器人中尚未有报道。
▍仿生鱼的设计原理与结构解读
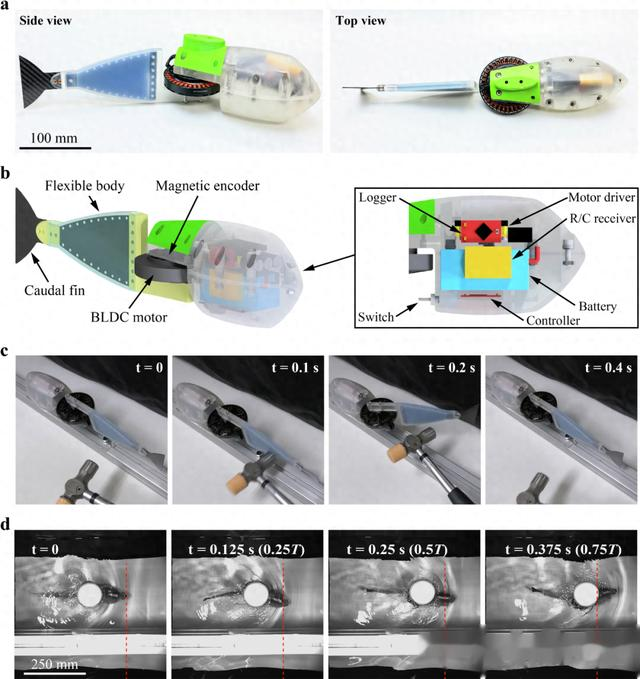
研究团队开发的直驱仿生鱼的设计灵感来源于鲹科游泳者的解剖学结构,仿生鱼总长度为412.5mm,重量为1.1kg,它主要由头部、电机、柔性体和尾鳍组成。仿生鱼头部容纳了驱动控制组件,如电池组、接收器、微控制器和电机驱动器。
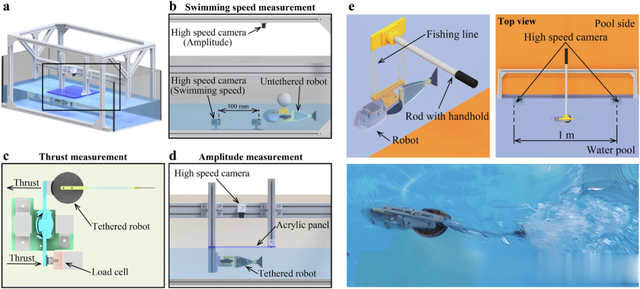
实验环节设计
为了简化实验设计,仿生鱼的主要游泳模式设置为前进,因此没有配备实现多自由度运动所需的部件,如胸鳍。控制系统通过向电机发送不同波形的输入电流驱动信号来控制机器人的运动。
研究人员表示,该仿生鱼采用高扭矩、高能量密度的无刷直流电机直驱柔性体和尾鳍。柔性体由硅胶橡胶制成,内部封装了一层碳纤维增强聚合物(CFRP),以确保其柔性、机械鲁棒性和耐久性。
尾鳍的设计基于初步实验,采用相同的CFRP薄片制成,以利用高频域内的共振模式。通过直驱和柔性连续体,机器人具有高反驱动力,即使受到锤击也能消散外部冲击而不会造成机械故障。
▍实验数据显示连续体直驱的仿生鱼具备快速旋转能力
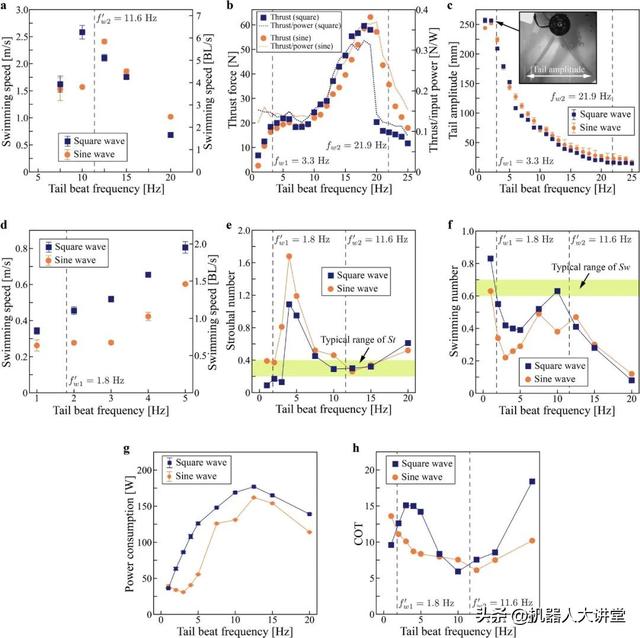
为了验证采用连续体直驱仿生鱼的性能,研究人员对其进行了测试,实验结果显示,仿生鱼在10Hz的驱动频率下达到了每秒2.6米(6.3倍体长)的最高游泳速度,在12.5Hz的驱动频率下达到了每秒2.4米(5.8倍体长)的游泳速度(使用正弦波)。
实验结果(尾拍频率的函数)
此外,仿生鱼在固定条件下的推力测量显示,在19Hz(正弦波)和18Hz(方波)时达到了峰值推力。从结果来看,仿生鱼在共振模式下实现了高效游泳。
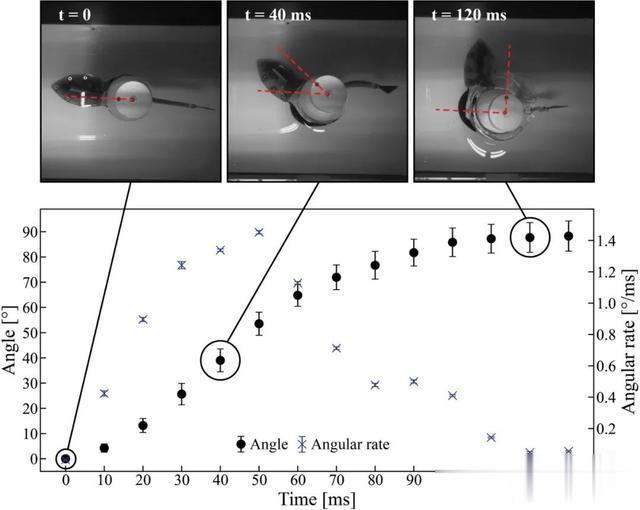
转速测量实验
同时该仿生鱼还具备快速的旋转能力,能够在110毫秒内实现约90° 的旋转,角速率为1450°/s。这种快速旋转能力类似于鱼类的逃逸机动。
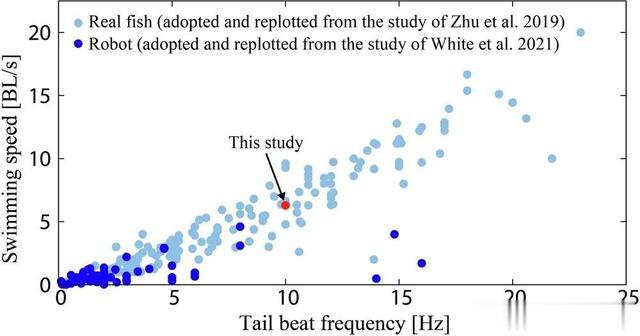
真实鱼类和仿生鱼的游泳速度与尾部拍动频率的关系
通过测量仿生鱼的游泳速度和尾鳍振幅,并计算斯特劳哈尔数和游泳数,可以看到这些参数在预测的频率值附近落入了自然界中观察到的典型范围内,表明机器人的游泳行为与自然鱼类相似。
在能量效率的角度来看,通过运输成本(COT)计算得出,在10Hz(方波)和12.5Hz(正弦波)时,COT达到了最小值,分别为5.9和6.1。这些低COT值表明,直驱方法通过弹性能量存储减少了电机的负载,从而降低了功率消耗,实现了更高效的游泳。
▍结语与未来:
日本研究团队采用直驱方式打造的仿生鱼具备出色的高速游动与旋转能力,且游动速度与真实鱼类相当,甚至某些指标优于现有水下仿生机器人。不过从现有运输成本COT来看,虽然一定程度上减少了电机负载,但仍低于真实鱼类,仍然存在一定的提升空间。
研究人员表示,未来团队将集中在优化机器人的身体和尾鳍的柔韧性(即弯曲刚度)上,以进一步提高推力和效率。此外引入可变刚度机制可能通过调制频率响应特性来进一步改善机器人的游泳性能。同时,开发用于多自由度运动的机器人架构和控制方法也将是未来的研究方向之一。
