反作用飞轮或动量轮是一种卫星姿态控制的执行机构。通过控制电机的电能流动方向,使卫星受到沿电机轴向的反作用力矩。多个动量轮组合可实现卫星的三轴姿态稳定。由于电机工作在空间环境,气动阻力可忽略不计;轴承加工及润滑技术的发展保证了动量轮轴承在长寿命中维持极低的摩擦阻力。根据需求,期望动量轮的输出力矩大范围连续可调,但并不需要较大功率的输出,因此电机工作在力矩控制模式下的空载状态。
无刷直流电机(BLDCM)因其具有结构简单、效率高、功率密度高、寿命长、机械性能好等优点,被广泛地应用于新能源汽车、医疗器械、航空航天、船舶推进、风力发电等多种功率等级的领域。
近年来出现的定子无铁心设计具有以下优点:
①消除了定子铁心损耗和涡流损耗,意味着在一定程度上提升了电机的功率密度;
②由于定子受力绕组的支撑部件使用非导磁复合材料制成,采用无齿槽设计进一步消除了定子槽引起的磁链谐波及由永磁体和定子铁心作用引起的齿槽转矩;
③定子绕组不再受到定子齿槽的约束,绕组的设计和安装更加灵活,无铁心电机气隙较大,定子绕组反电动势分布引起的谐波可忽略不计,同时大气隙意味着在大的电枢电流激励下难以产生磁饱和情况,在定子绕组散热允许的条件下,电机具有强过载能力;
④定子无铁心设计在尺寸和质量上具有优势。因此无铁心电机适用于小功率空载模式的空间应用。
但是,无铁心电机电感值极小,仅有几个到几十个μH。小功率的无铁心电机会产生很大的电流脉动,给电机绕组的相电流带来高次谐波,电机驱动在开关频率较低、输出电流较小的时候会存在电流断续的问题,严重时会导致电机无法正常运行,甚至在起动过程中,电枢绕组发生直通短路,损毁控制器或烧毁电机定子绕组。为解决无法正常运行的问题,小电感电机的控制通常有以下四种改进思路:①高开关频率宽禁带功率器件逆变器控制;②电压源型逆变器串联谐波滤波器控制;③电流源型逆变器控制;④多电平逆变器控制。
除针对基本驱动拓扑的研究外,现有文献对无刷直流电机的研究大多针对大电感直流无刷电机换相区的转矩脉动,且出于标准梯形波反电动势的假设。但无铁心电机换相区很短,与普通无刷直流电机性能的优化方法存在一定差别。
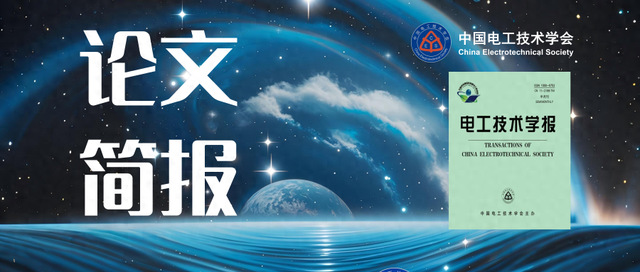
中国科学院电工研究所的李昊岩、许海平、陈曦,针对定子无铁心永磁无刷直流电机电枢电感较小导致电流脉动较大,无法使用传统三相全桥直接驱动的问题,根据不同提升时间常数的思路设计并制造了三种驱动拓扑,并使用平均电流控制方法驱动同一台电机。实验结果表明,三种拓扑均能保证无铁心小电感电机在最恶劣情况时的电流连续,为小功率无铁心永磁无刷直流电机的工程应用提供了参考依据。但在实际应用中,三种驱动拓扑各有优缺点。
图1 三种驱动拓扑电路
研究者发现,Buck+半桥拓扑所需的功率开关管数量最少、驱动难度最小。体积、质量和成本最少。对于同一台电机,升至同一最高转速所需母线电压等级是全桥拓扑的一半。以相同最小电流起动所需的Buck变换器的电感值更小。同时,半桥拓扑单相导通开关管损耗相对更低。但是电流性能较差,无续流通路导致开关管硬关断,母线有较大的电压尖峰,EMC性能较差。电流脉动和谐波会随转速的上升而大幅度地升高。

图2 飞轮驱动系统实验平台
此外,单级半桥串联三电感拓扑的电流谐波成分随转速上升变化不大。等效成大电感电机使其能够使用矢量控制的控制算法。但是将电感增加在电枢回路内的思路使得电机换相时间增加,导致高速可控性能变差。此外,电流脉动成分最多,低速时斩波引起的脉动和谐波成分很高。
他们表示,Buck+全桥拓扑电流脉动及电流谐波最小,换相时间和脉动较少。且导通区和换相区的性能可以进一步优化。但其硬件成本和体积更大,效率较低。

表1 三种驱动拓扑对比总结
研究者指出,普通的单级全桥驱动不能保证无铁心小电感电机在母线输入电压受限情况下,四象限正常可靠运行。Buck+全桥拓扑可以获得最好的电流及转矩性能,在此基础上可通过拓扑及控制算法方面的研究来进一步提升性能,但是在实际工程应用中,由于母线输入电压、体积、质量、成本的限制,可考虑Buck+半桥拓扑来实现无铁心小电感电机四象限正常运行。全桥串联电感拓扑方案仅适合使用在电机中低速区间。
本工作成果发表在2023年第24期《电工技术学报》,论文标题为“定子无铁心永磁无刷直流电机驱动拓扑设计方案及对比”。本课题得到山东省重点研发计划(重大科技创新工程)和齐鲁中科电工先进电磁驱动技术研究院科研基金的支持。
