在汽车技术日益发展的今天,自动驾驶成为了人们热议的话题。其中,泊车技术作为自动驾驶的一个重要环节,备受关注。想象一下,当你忙碌了一天,回到家中,只需轻轻一按手机,爱车就能自动泊入车位,是不是感觉很方便?今天,我们就来聊聊如何利用CarSim和Simulink这两款强大的工具,搭建一个平行泊车仿真环境,让你亲身体验自动驾驶的魅力。
让我们来谈谈CarSim中的泊车环境搭建。CarSim,作为一款专业的汽车动力学仿真软件,为我们提供了一个虚拟的测试平台。在这个平台上,我们可以模拟各种复杂的驾驶场景,对车辆的性能进行测试和优化。而搭建一个平行泊车环境,就是这个平台上的一个小小挑战。

我们要选择一辆合适的车辆模型。在这里,我们选择了一辆B型车,它的轴距是2.8米。轴距这个参数非常重要,因为它直接关系到车辆的转弯半径和泊车轨迹。在后续搭建控制算法时,我们会频繁用到这个数值。

接下来是车辆控制部分的设置。虽然这部分在本文中不做详细展开,但它是整个仿真系统不可或缺的一部分。车辆控制模块负责接收来自路径跟踪算法的指令,并实时调整车辆的转向、加速和制动,以确保车辆能够按照预定的轨迹行驶。
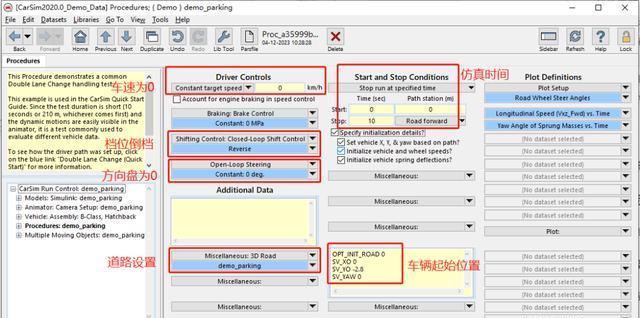
道路设置也是关键的一步。我们首先设置了一条直线路径,这条路径虽然简单,但却是后续仿真测试的基础。接着,我们对道路宽度、车道线、草坪等进行了简单设置。道路宽度设置为3.5米,这是标准的单车道路宽。车道线采用白色虚线,间距为0.5米,这样的设置既符合实际道路情况,又便于我们在仿真过程中进行观察。草坪部分则用绿色填充,以区分道路和其他区域。

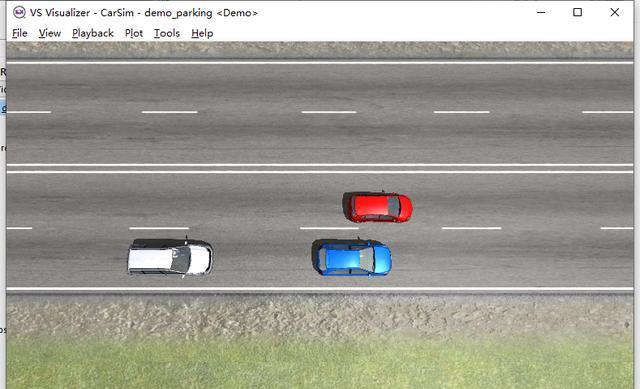
障碍物设置是模拟真实泊车环境的重要环节。我们在车辆前后各设置了一辆车作为障碍物,它们的位置分别是距离本车10米和5米。这些障碍物的存在,将考验我们的路径跟踪算法是否能够准确、安全地绕过它们,完成泊车任务。

输入输出接口的设置则连接了CarSim与Simulink两个平台。在输入接口中,我们设置了车辆的速度、转向角度等控制信号,这些信号将由Simulink中的路径跟踪算法生成。输出接口则用于接收CarSim中模拟的车辆状态信息,如位置、速度、加速度等,这些信息将反馈给Simulink中的算法进行实时调整。

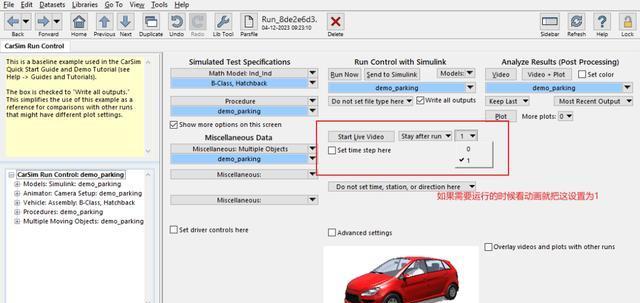
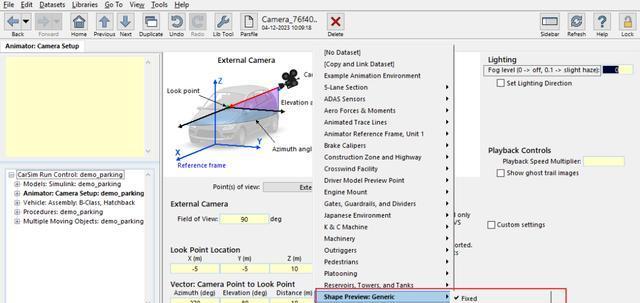
动画设置则让我们能够直观地观察仿真过程。我们选择了固定视角位置,并调整了视角的高度和角度,以确保能够清晰地看到整个泊车过程。在动画设置完成后,我们可以点击“send to simulink”按钮,将设置好的场景发送到Simulink中进行仿真测试。
当我们将场景发送到Simulink后,可能会遇到动画界面位置不对的情况。这其实是初始化的问题,只要等待Simulink运行一段时间,动画界面就会自动调整到正确的位置。
接下来,我们来到Simulink中搭建路径跟踪算法。Simulink是一款强大的数学建模和仿真工具,它为我们提供了丰富的模块库和灵活的接口设置,使得我们可以方便地搭建出复杂的控制系统。
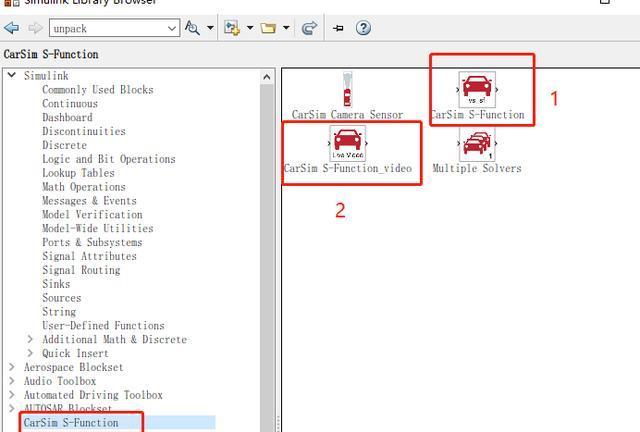
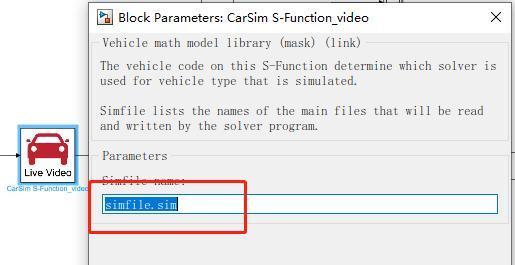
在Simulink中,我们首先添加了CarSim的模块,并设置了模块的名字为simfile.sim。这个模块将负责与CarSim进行通信,接收来自CarSim的车辆状态信息,并发送控制信号给CarSim。
我们搭建了车速控制模块。这个模块根据预设的车速值,生成相应的加速度信号,并发送给CarSim中的车辆控制模块。在这个例子中,我们将车速设置为5km/h,这是一个适中的速度,既不会太快导致泊车困难,也不会太慢影响仿真效率。

坐标转换模型则负责将CarSim中的车辆状态信息从车辆坐标系转换到世界坐标系。这是因为我们的路径跟踪算法是在世界坐标系下进行计算的,所以需要将车辆状态信息转换到同一坐标系下进行比较和计算。
MPC路径跟踪控制器模型是整个仿真系统的核心部分。我们采用了之前上传的parallel_2DOF_level2.m模型,并对其进行了简单的修改。具体来说,我们修改了m文件中的轴距长度和Y值,以适应我们当前的车辆模型和泊车环境。这个控制器模型将根据车辆当前的位置和姿态,以及预设的泊车路径,生成相应的转向角度和速度控制信号。

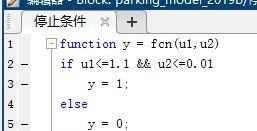
仿真结束条件模型则用于判断仿真是否应该结束。我们设置了两个结束条件:一是车辆到达预设的泊车位置,二是仿真时间达到预设的最大值。当满足任一条件时,仿真将自动结束。

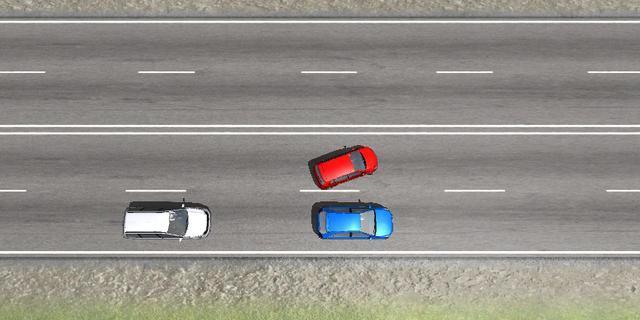
在搭建好Simulink模型后,我们就可以运行仿真并查看结果了。当我们点击运行按钮的那一刻,仿佛打开了一个通往虚拟世界的大门。在仿真过程中,我们可以看到车辆在CarSim中按照预设的路径缓缓前行,时而转向、时而加速、时而减速,每一个动作都显得那么流畅而自然。

随着仿真的进行,车辆逐渐接近目标车位。此时,我们可以看到MPC路径跟踪控制器模型正在发挥着作用。它根据车辆当前的位置和姿态,以及预设的泊车路径,实时调整着车辆的转向角度和速度控制信号。在它的精确控制下,车辆顺利地绕过了前方的障碍物,并准确地对准了目标车位。
当车辆完全泊入车位时,我们看到了令人满意的仿真结果。车辆不僅位置准确、姿态端正,而且整个泊车过程流畅自然,没有出现任何碰撞或刮擦的情况。这一刻,我们仿佛看到了自动驾驶技术在现实生活中的美好应用。
仿真结果并不总是一帆风顺的。在仿真过程中,我们可能会遇到各种问题,如车辆偏离预定轨迹、碰撞障碍物等。但正是这些问题,促使我们不断优化算法、调整参数,以达到更好的仿真效果。

通过这个简单的平行泊车仿真示例,我们可以看到CarSim和Simulink在自动驾驶技术研究中的重要作用。它们为我们提供了一个虚拟的测试平台,让我们可以在不涉及实际车辆和道路安全的情况下,对自动驾驶算法进行测试和验证。这种虚拟测试不僅成本低、效率高,而且可以模拟各种复杂的驾驶场景,为我们的研究提供极大的便利。

展望未来,随着自动驾驶技术的不断发展,我们将面临更多的挑战和机遇。但无论如何,像这样的仿真技术都将是推动自动驾驶技术发展的重要力量。让我们携手共进,共同迎接自动驾驶时代的到来吧!

在这个充满科技魅力的时代,让我们一起探索、一起创新,让自动驾驶技术为我们的生活带来更多的便捷和美好。相信在不久的将来,我们就能真正享受到自动驾驶带来的便捷与安全,让每一次出行都成为一次愉悦的旅程。

