进入绕月轨道24天后,嫦娥六号终于迎来了激动人心的时刻:2024年6月2日06时23分,探测器的着陆器与上升器组合体成功登陆月球背面南极-艾特肯盆地预选着陆区。
嫦娥六号登月不仅是我国第四次成功实施的月面软着陆任务,而且也是第五次成功实施的地外天体登陆任务(别忘了,还有天问一号),不论是登月成功率,还是地外天体登陆成功率,均为100%。
在四次登月任务中,嫦娥六号可以称得上是佼佼者,虽然暂时没有明确数据支撑,但可以推测,得益于CZ-5火箭运力的挖潜提升,此次登月的探测器可能是我国迄今为止重量最大的一个。

在此前的登月任务中,对落点位置偏差要求最高的是嫦娥四号探测器,因为要登陆月球背面复杂地形,着陆区面积狭小,要具备定时定点着陆能力。
嫦娥六号登陆点与嫦娥四号一样,皆在月背南极-艾特肯盆地之内,预选着陆区面积同样狭小,地形也同样复杂,因此也要求具备定时定点着陆能力。

嫦娥六号降落相机拍摄的登月实况画面
以最重的身姿实现月球背面复杂地形的定时定点着陆,这一句话就足以表述嫦娥六号的登月成就。
嫦娥六号是如何实现定时定点登月的?
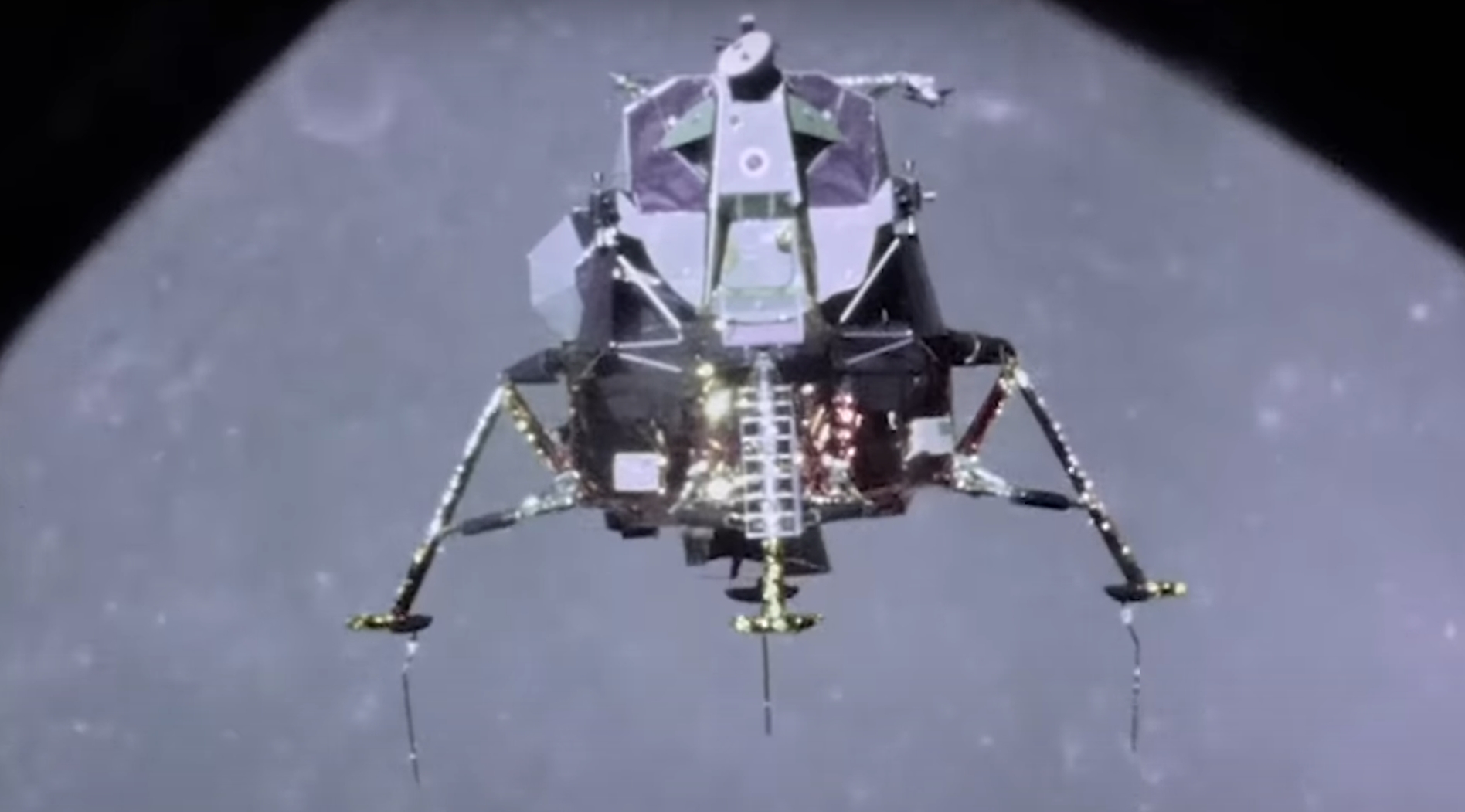
先来看最近一个比较火的话题,就是为什么美国阿波罗登月来回只要8天,而嫦娥六号需要五十多天?

阿波罗16号飞船登月舱
时间差别是多种因素导致的,比如不同的火箭运力使得探测器进入的地月转移轨道时间周期不同,导致地月转移时间差异。
另外,嫦娥系列着陆器至今仍为无人探测器,对时间并不敏感,为了拥有更多的发射窗口,可以利用绕月等待的方式与着陆轨道面重合。
还有一个很重要的原因是,嫦娥系列着陆器主要依赖太阳能电池翻板获取电能,需要等待合适的太阳高度角,以便于落月后的作业。阿波罗登月舱则不同,半个世纪前太阳能电池效率不高,它是靠蓄电池供电,因此不需要等待太阳高度角的变化。

嫦娥六号着陆器与上升器组合体展开太阳能电池翻板(遥测图像)
在嫦娥六号登月下降之前的二十多天里,通过不同周期绕月椭圆轨道变轨以及绕月等待期间的轨道控制,逐步消除了轨道面数据残差,确保以最精确的轨道实施登月下降,这就有了定时定点落月的前提条件。
嫦娥六号开始登月操作的第一个大的动作就是轨道器/返回器组合体与着陆器/上升器组合体两两分离,后者独自登月。
话说两组合体分离的实况画面的科幻感总是激动人心的,从半个世纪前的阿波罗11号到如今的嫦娥六号都有此类画面(嫦娥六号相较于嫦娥五号报道强度不足,所以目前组合体两两分离画面暂未公开),这是人类走向星辰大海梦想的伟大实践,此情此景不免想起苏联航天先驱齐奥尔科夫斯基的那句名言:地球是人类的摇篮,但人类不可能永远束缚在摇篮里。

嫦娥五号着上组合体与轨返组合体分离
阿波罗12号登月舱组合体与指令舱/服务舱组合体分离
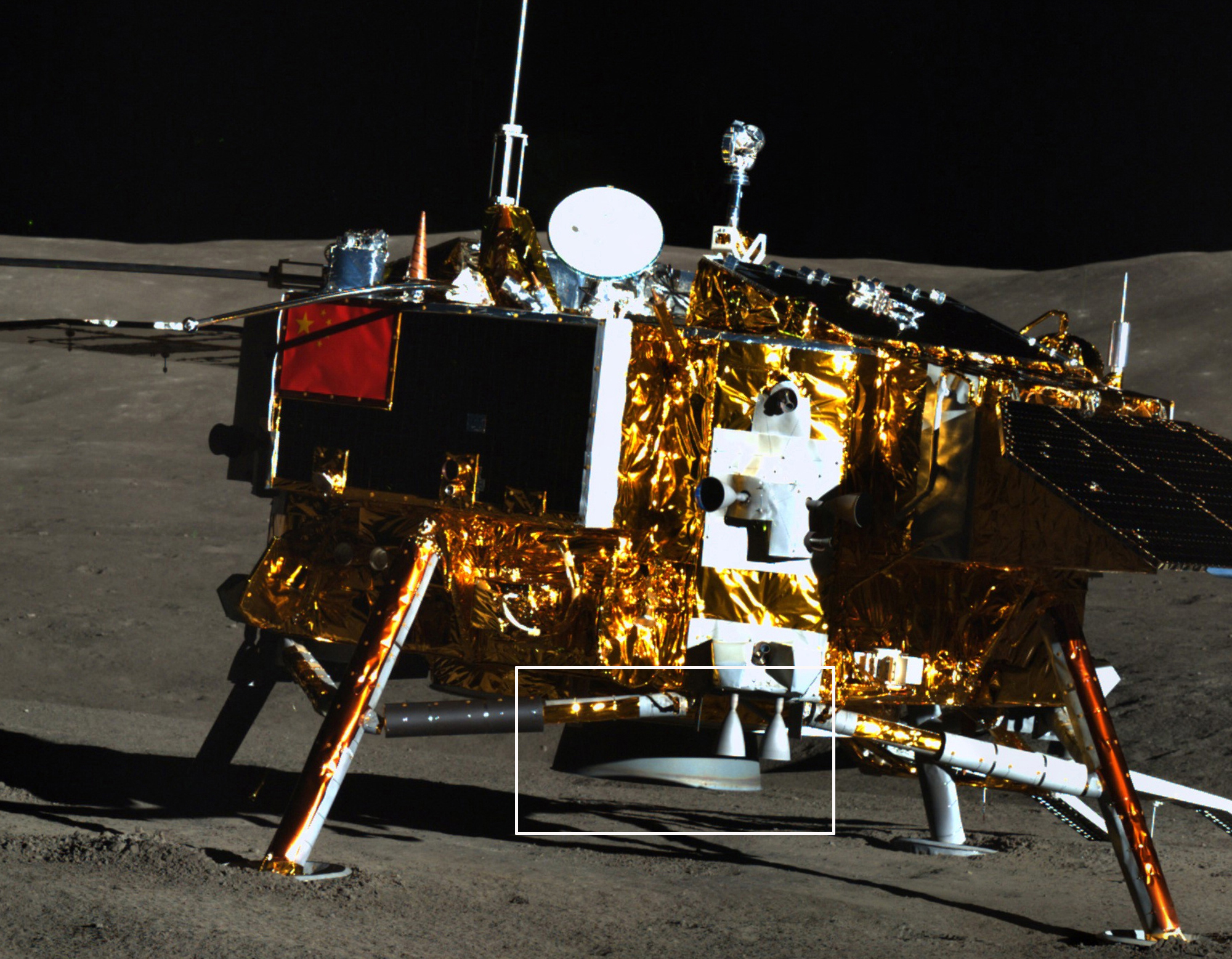
嫦娥六号的着陆器/上升器组合体之后将独自进入近月点15公里、远月点200公里的着陆准备轨道,并调整姿态,着陆器发动机喷口朝前,着陆任务开始前还需要收起太阳能翻板,着陆窗口到来后,配置在着陆器底部的7500N变推力发动机点火启动,并以最大推力强劲喷射,着上组合体自近月点15公里高度开始制动减速,进入主减速阶段。
登月与撞月的本质不同就在于速度,后者没有减速需求,前者则要求探测器主动减速,具体来说就是从1.7公里/秒降为零,而月球与地球、火星的不同之处在于,它几乎没有大气层,因此无法像神舟飞船或者天问一号那样利用大气层进行气动减速,嫦娥六号的速度控制完全依赖发动机的动力减速。

着上组合体动力减速
主减速段在整个登月任务中航程最长,减速量也最大,完成此阶段任务后,速度将从1700米/秒下降至约57米/秒,此时探测器就已经来到了着陆区附近。
由于嫦娥六号登陆的月球背面地形复杂,降落航迹下方的地形起伏高差可达上万米,这就会使得测距数据出现剧烈的跳跃,不利于安全着陆。比如日本白兔-R着陆器就是因为测距数据错误导致其在距离月面还有5千米高度时就误以为自己即将落月,然后反推发动机持续喷射进行缓速下降,最终燃料耗尽直接撞月。

日本白兔-R着陆器撞月效果图
除了日本白兔-R探测器,由于导航算法故障导致登月失败的还有印度的月船二号登月任务,他们就是因为测距测速信息引入机制的设计错误导致在距离月面2.1公里时失联撞月。

印度月船二号着陆器失控翻跟头(遥测图像)
与嫦娥六号一样,同为月背复杂地形着陆任务的嫦娥四号采取的应对办法是整个主减速段不引入测距数据,单纯依靠惯性导航,这样就巧妙地避开了测距数据跳跃的状况。当探测器完成主减速段任务后就来到了着陆区附近,测距敏感器就可以对准着陆区获取测距数据,就不会出现数据跳跃的问题。

嫦娥四号(左)与嫦娥三号(右)登月下降轨迹对比

嫦娥四号在月面上空约8000米高度开始转垂直降落姿态
起初笔者猜测嫦娥六号会采取与嫦娥四号相似的登月方案,在较高的高度,比如八千米以上高度作为主减速段的终点高度,并在此高度转垂直下降,但根据最新消息研判,嫦娥六号可能并没有这样做,而是选择与嫦娥三号类似的平缓下降方案。
这是为什么呢?原因可能是嫦娥六号降落的地点海拔更低,相对高度更大,推进剂消耗也更多,而嫦娥六号自身重量也很大,推进剂禁不住折腾,因此就必须克服主减速段测距数据跳跃的难题,而成功登月的实践证明了中国航天人的集体智慧。
接下来就是快速调整段,探测器的姿态将趋近于垂直下降,7500N发动机开始降低推力,主要为衔接后面的接近段。

嫦娥六号快速调整段(视频画面有加速)
接近段,顾名思义就是逐步接近着陆点,此阶段的主要任务是进行粗避障,着上组合体在距离月面1500米高度使用光学成像敏感器对着陆区成像,第一次选择安全着陆区,并通过调节发动机推力修正下降航迹,以规避月面较大的撞击坑。

光学成像敏感器
当着上组合体距离月面约100米时,此时探测器已经非常接近月面了,它需要在此高度进行悬停,此为悬停段。
在悬停阶段,着上组合体的水平速度与垂直速度皆为零,悬停飞行状态是为探测器进行精确的障碍识别服务,此时激光三维成像敏感器与激光测距仪将协同作业,对月面区域进行高精度三维成像,再将成像数据进行网格化处理,并基于专门设计的算法进行第二次着陆点遴选,此为最终安全落点。
嫦娥四号悬停成像选择的安全着陆区

激光三维成像敏感器生成的嫦娥四号安全着陆区立体影像(局部)
悬停段结束后,探测器朝着目标着陆点进行下降机动,此为避障段,当下降至距离月面约30米高度时,机动避障任务结束,探测器已经精确地来到了着陆点上空,想象一下此时探测器的高度大约就是相当于10层楼房的高度,此时距离登月胜利这个结果只有一步之遥了。

嫦娥三号避障机动飞行实况画面
接下来,嫦娥六号着陆器与上升器组合体就进入到了缓速下降阶段,此时水平速度为零,下降速度对比前一个阶段还要略高一点,这是考虑到了如果下降速度过慢,探测器自身的漂移积累误差就会加大,就可能与安全着陆点失之交臂,落在平整月面还好,如果落在坑里或者岩石上就不妙了,还有就是,降落时间过长,推进剂的消耗量会更多,不利于安全落月。
因此,为了更快且精准地降落至目标着陆点,速度就要快一些。

当探测器距离月面约3米高度时,伽马高度计会感知到高度数据,知道即将接触月面,它将会向发动机发出关机指令。
也就是说,在最后的3米左右高度时,探测器是无动力自由落体降落至月面,之所以这样设计是为了降低发动机羽流吹起的月尘干扰,月尘可能会附着在太阳能翻板上,也可能落在其它有效载荷上造成不良影响。
虽然是自由落体,但嫦娥六号还有后招,其着陆腿内置有铝制蜂窝材料可以吸收垂直方向的冲击力,连接着陆腿的拉杆内置高效吸能合金,它可以通过自身的结构变形吸收来自水平方向的冲击力。

嫦娥六号应用的是与嫦娥三号一脉相承的同款接力避障登月方案,正是此套技术方案的创造与应用,我们才终结了人类无人探测器盲降月球的历史,嫦娥三号以前的无人着陆器均不具备末段自主避障能力,它们只能瞄准开阔平坦的着陆区闭着眼睛落下去,成败主要靠概率,阿波罗登月飞船也是在宇航员的介入下才具备避障能力。
总结起来看,嫦娥六号落月有这么几个阶段,主减速段、快速调整段、接近段、悬停段、避障段、缓冲下降段、着陆缓冲段,实际上从大的范围来讲以快速调整段为分水岭只有两个大的阶段,主减速段自成一体,此阶段完成后探测器就已经来到着陆点附近,快速调整段之后的各阶段任务都是为避障登月服务。
嫦娥六号着上组合体登月主减速段实况画面(画面有加速)
嫦娥三号、嫦娥四号、嫦娥五号、嫦娥六号,四次登月成功的关键就在于基于机器视觉理念设计的粗避障+精避障的接力避障方案,这就离不开两大关键的工程载荷:光学成像敏感器与激光三维成像敏感器。
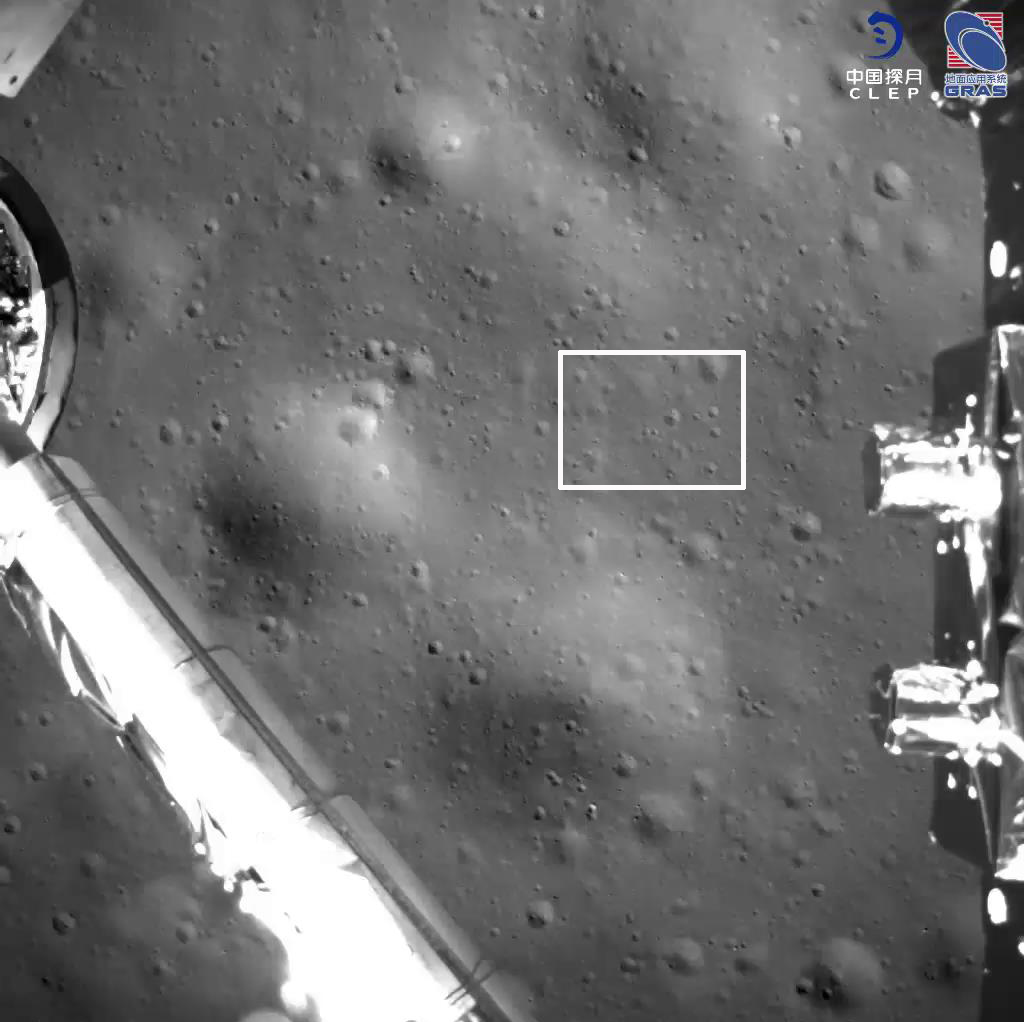
光学成像敏感器可以在远距离对预选着陆区进行大动态范围成像,利用设计算法避开大型撞击坑,在成像区域范围内选择安全着陆区,为后续精确障碍识别奠定基础,此为“粗避障”。

嫦娥四号光学成像敏感器粗避障成像,白色方框中心有撞击坑,这个问题可在精避障环节解决。
从嫦娥五号开始,用于粗避障的敏感器又多了一个“着陆地形敏感器”,功能与光学成像敏感器完全一致,两台载荷同时开机,一旦光学成像敏感器故障,可快速切换至着陆地形敏感器,具有强大的冗余能力配置。
光学成像敏感器与着陆地形敏感器虽然功能相同,但却是由两家不同单位设计制造,目的就在于避免出现相同原因故障,进一步提高设计可靠性。
当探测器在月面上空百米高度悬停时就进入到了精避障环节,工程总体要求着陆器降落在10米 X 10米的安全着陆区,且此区域内的月面坡度不大于8°,也不能出现高于20厘米的凹坑与凸起的石块。
为什么着陆条件要这么严苛?看看美国前不久的奥德修斯着陆任务就知道了,该探测器就是因为着陆腿卡在了石块上导致侧翻,这说明他们的末段障碍识别能力还是不过关。

奥德修斯着陆器断腿前后对比图
要想满足如此苛刻的着陆条件,就离不开我们的激光三维成像敏感器,此装置早在十年前应用时就达到了国际领先水平,十年后的当下,其国际领先地位仍无可撼动。
激光三维成像敏感器可在百米高度向月球表面高频发射16道激光波束,0.25秒内完成2500平方米的着陆区瞬时扫描,单幅图像的激光点云达到20万点,测距精度优于5厘米,然后再用几秒钟时间基于外螺旋搜索算法进行安全着陆点的选择。

激光三维成像敏感器

在嫦娥三号时期,算上成像、数据处理、安全着陆点选择耗时是10秒钟,探测器最长悬停时间是30秒钟,也就是说可以有3次选择安全着陆点的机会,而到了嫦娥五号、嫦娥六号时期,已经可以实现在10秒钟时间内进行3次安全着陆点的选择机会,也就是说节省了20秒的悬停时间余量,此举可以节省20公斤推进剂,这对于由着陆器与上升器组成的大重量着陆组合体而言这是至关重要的减重升级。
当前即便是最高分辨率的月面遥感成像照片也难以完全识别对着陆任务有风险的复杂地形,况且由于着陆位置偏差问题的客观存在,使得着陆器必须具备自主障碍识别与规避能力。
话说,嫦娥系列着陆器应用的激光三维成像敏感器究竟有多强?
最经典的案例还得是嫦娥三号,着陆器降落月面后正前方10米就有一个撞击坑,10米这个距离数据刚好吻合工程总体对最终安全落区面积10米 X 10米的要求标准,而且附近不远处还有大型岩石,这对于工程团队而言,真的是太惊险了,但对于进行月球地质研究的科学家们来说却是喜出望外,他们最喜欢这种复杂地形,因为可以获取更多的科学信息,其中一位科学家就说,嫦娥三号避障真牛,找的这块地儿绝了!

嫦娥三号落点附近的大型岩石

玉兔号月球车拍摄嫦娥三号着陆器
接力避障技术方案不仅利好登月,更利好月面起飞任务,因为上升器在月球起飞本来就没有类似地球那样的发射场系统支持,而睁大双眼的接力避障技术方案的应用,可以让着上组合体降落在坡度不大于8°的平整月面,这就为月面起飞创造了很好的条件。
不得不说,深空探测技术真的是一环扣一环,每个环节都是为下一个环节打基础。
除了接力避障,再有就是下降反推动力的能力。比如前不久,日本SLIM探月智能着陆器原本可以创造完美的高精度落点控制条件下的月面软着陆,但就在登月最后阶段出现了动力故障,2台下降发动机的其中1台的喷管掉落月面,推力骤降,最终以倒栽葱的方式落月,什么是基础不牢地动山摇,这就是。

日本SLIM探月智能着陆器掉落月面的发动机喷管

日本SLIM探月智能着陆器倒栽葱式登月
嫦娥系列着陆器的下降动力是一台7500N发动机,该型号是我国第一款具备大范围推力调节能力的变推力发动机,能够在1500N至7500N推力区间实现推力调节,在整个主减速段该型发动机都是满推力运行,但从快速调整段开始就要降推力运行,以实现对探测器降落速度的精准控制。
如果没有强大的变推力能力,就需要多台发动机并联,通过减少工作台数实现总推力的调节。
嫦娥四号着陆器

国产7500N变推力发动机
7500N变推力发动机不仅助力我国4次登月四战四捷,其衍生型号还用到了另外一颗地外天体任务中,助力天问一号登陆火星成功,接下来嫦娥七号、嫦娥八号等任务还会用到它,甚至我国载人登月任务中的揽月号月面着陆器也还将用到这款动力,金牌动力实至名归。

我国揽月号载人月面着陆器官宣模型

7500N变推力发动机
嫦娥六号着陆器/上升器组合体登陆月面后紧接着就要开始为期48小时的月面采样作业,这项任务也有很多亮点,比如钻进深度可达数米的旋转冲击钻、表取智能采样等,限于篇幅这件事笔者下次再谈。
厉害了我的国,伟大祖国越来越强盛。
这次的嫦娥6登月,显示出的技术真的太牛逼了。这也能看出中国的军事技术远远不像表面这么简单。精确定位,雷达技术,数据传输,传感器等等。说世界一流绝对没问题
绝对找不到[呲牙笑]美国🇺🇸月球车……
人类文明还是要看华夏子民延续
日本的着陆器都能被拍到,阿波罗的更大,更多,为什么不把照片放出来呢?我是坚信美国登月的,人工操作登月肯定能控制各种突发情况
说的太细,注意技术保密。
还TM洗呢?38万公里,单程4天,自己算算时速是多少?你脑黄再小,估计也得散喽。
月球是中国的 其他国家上去都是侵犯,坚决打击
小便是懂行的
其着陆细节,真的假的无从考究,但100%地外天体着陆成功,已经真真实实地冲击了美国的六次影视片纪录。对于坚持说美国航天技术第一的狗脸则是狠狠的一掌刮。
美国航天局:完了穿帮了![呲牙笑][呲牙笑]
历害了我的祖国!致敬所有人!这用在导弹上不是指哪打哪!
月背表面有很多凸起来的泡泡,与对地球一面很多凹入的撞击坑正好相反,很奇特的月背貌。
之前做过一个梦,梦见自己登陆了月球背面,虽然荒诞,但如今嫦娥六号成功登陆,相信不久将来我国就真的送人上去了[点赞][点赞]
科普文章,很给力。就是一次登月展现的个方面技术是多么强大[点赞]。给祖国点赞,给作者点赞。互联网需要这样的优秀文章。
这不算泄密吗?说那么清楚
祝贺祖国!注意保密。
祝福祖国繁荣昌盛!
在这个登陆器上栽个人,可以登月吗?
写这么详细,好像我看得懂似的,关键不怕泄密吗?
嫦娥六号用的是:太阳能电池,而半个世纪前美国的阿波罗用的是:蓄力池供电,月球白昼温差300多度的状况下,什么样的“蓄电池”有此特异功能。另,嫦娥六号传回的月球表面“月壤”光滑无灰尘并有许多“撞击坑”,而美国阿波罗传回来的影像及照片,月球表面“月壤”有厚厚一层类似“火山灰”的沙尘,并没有明显的“撞击坑”,还留下“奇怪的大脚印”,难道真的有“两个月球”。
我就不信能有好莱坞登月惊险?
这东西过阵子还要自己起飞逃离月球引力回归地球,怎么做到的,哪来那么多燃料,牛逼啊!是不是太阳能电池板储能加上固体燃料
[点赞][点赞][点赞]
言多必失,小编打算泄密啊。
老美:说了一堆啥玩意,一点也听不懂,当年我们登月哪有这么复杂!导演说开机,我们就上去了,导演说咔,我们就回来了,多简单啊!
问题来了,那时候阿波罗载人登月不靠太阳能而采用蓄电池,那时候的蓄电池容量多大,体积多大,重量多大,才能给登月器提供足够的动力
我国要组建中国人民解放军,驻月球省部队。
强悍的实力![点赞][点赞][点赞]
怎么叫惊险!?现在的标题都是乱写
那是太阳能帆板,不是翻版,小编!
为什么我国官方,要替美国人假登月说成是真的???
难怪月亮那么亮,上面那么多象玻璃的石头
金牌着陆名至实归。
月亮自古就是中国人的
在月亮背面着陆难度大太多了
有没有懂航天的,帮阿波罗计算下,以相对现在可以说是石器时代的技术,是怎么那么迅速的,把那么重的人 、货搬上去又搬回来的。燃料够用吗?当时能量密度那么小的蓄电池,需要多重电力才够用?
厉害👍🏻
在小小的月球上挖呀挖呀挖[呲牙笑]
跟好几十年前所谓的阿波罗登月时代相比,现在传感器成像技术电子技术计算能力通信能力先进太多了,我们才比较成功的无人上月球。实在是难以想象,它们是怎么在那么落后的技术条件下,首次登月就能一次性将几个人送上去还能安全回来,然后几十年间再也不去了