活动选择问题是一个典型的贪心算法问题,其目标是选择一组不重叠的活动,使得这些活动的总时间最长。动态规划也可以用来解决这个问题,但需要更多的存储空间来保存子问题的解。
为了设计动态规划算法,我们需要定义状态 c[i, j],它表示在考虑活动集合 S = {a_1, a_2, ..., a_n} 的前 j 个活动,并且必须包含第 i 个活动时的最大兼容活动集的大小。
根据这个定义,我们可以写出状态转移方程:
c[i, j] = 1 + max(c[k, j-1]) for all k < i and finish[k] <= start[i]其中 finish[k] 和 start[i] 分别表示活动 k 的结束时间和活动 i 的开始时间。这个方程表示,为了最大化包含活动 i 的兼容活动集的大小,我们需要找到所有在活动 i 开始之前结束的活动 k,然后在这些活动的基础上选择最大的兼容集。
下面是一个使用 Go 语言实现的动态规划算法,该算法同时计算出最大兼容活动集的大小和最大集本身:
package main import ( "fmt" ) type Activity struct { start, finish int } func max(a, b int) int { if a > b { return a } return b } func maxCompatibleActivities(activities []Activity) ([]Activity, int) { n := len(activities) c := make([][]int, n) prev := make([][]int, n) for i := range c { c[i] = make([]int, n) prev[i] = make([]int, n) } // Base case: single activities are always compatible for i := 0; i < n; i++ { c[i][i] = 1 prev[i][i] = i } maxSize := 0 maxSet := []Activity{} for j := 1; j < n; j++ { for i := 0; i < j; i++ { maxSize = 0 for k := 0; k < i; k++ { if activities[k].finish <= activities[i].start && c[k][j-1] > maxSize { maxSize = c[k][j-1] prev[i][j] = k } } c[i][j] = maxSize + 1 if c[i][j] > maxSize && maxSize > 0 { maxSet = append(maxSet[:0], activities[i]) maxSize = c[i][j] } } } // Reconstruct the maximum set for j := len(activities) - 1; j >= 0; { i := prev[j][len(activities)-1] maxSet = append(maxSet, activities[i]) j = i } // Reverse the set to match the original order for i, j := 0, len(maxSet)-1; i < j; i, j = i+1, j-1 { maxSet[i], maxSet[j] = maxSet[j], maxSet[i] } return maxSet, maxSize } func main() { // Example activities sorted by finish time activities := []Activity{ {start: 1, finish: 2}, {start: 3, finish: 4}, {start: 2, finish: 5}, {start: 0, finish: 6}, {start: 5, finish: 7}, {start: 6, finish: 8}, } maxSet, maxSize := maxCompatibleActivities(activities) fmt.Printf("Maximum compatible activities set: %v\n", maxSet) fmt.Printf("Size of the maximum compatible activities set: %d\n", maxSize) // Note: Comparing the running time of this DP algorithm with GREEDY-ACTIVITY-SELECTOR // would depend on the implementation
在这里插入图片描述

在这里插入图片描述

在这里插入图片描述

在这里插入图片描述
讯飞星火,抛panic:首先,我们需要定义一个递归式(16.2)。假设我们有一个活动集合A,其中每个活动a[i]都有一个开始时间s[i]和一个结束时间f[i]。我们可以使用以下递归式来计算最大兼容活动集的大小:
c[i, j] = max(c[i-1, j], c[k, i-1] + 1), 其中k是满足s[k] <= f[i]的最大索引。
为了生成最大兼容活动集本身,我们需要在计算c[i, j]时记录选择的活动。
以下是用Go语言实现的动态规划算法:
package mainimport ( "fmt")func activitySelector(s, f []int) (int, []int) { n := len(s) c := make([]int, n+1) activitySet := make([]int, n+1) for i := 1; i <= n; i++ { activitySet[i] = i c[i] = c[i-1] for k := 0; k < i; k++ { if s[k] <= f[i-1] && c[k]+1 > c[i] { c[i] = c[k] + 1 activitySet[i] = k } } } selectedActivities := make([]int, c[n]) j := n for i := c[n]; i > 0; i-- { selectedActivities[i-1] = activitySet[j] j = activitySet[j] - 1 } return c[n], selectedActivities}func main() { s := []int{1, 3, 0, 5, 3, 5, 6, 8, 8, 2, 12} f := []int{4, 5, 6, 7, 9, 9, 10, 11, 12, 14, 16} maxSize, selectedActivities := activitySelector(s, f) fmt.Println("最大兼容活动集的大小:", maxSize) fmt.Println("最大兼容活动集:", selectedActivities)}这个算法的时间复杂度为O(n^2),其中n是活动的数量。与GREEDY-ACTIVITY-SELECTOR算法相比,动态规划算法可以在O(n^2)时间内找到最大兼容活动集,而贪心算法只能找到最大兼容活动集的一个近似解。

在这里插入图片描述

在这里插入图片描述
360智脑,抛panic:以下是一个使用Go语言实现的动态规划算法,用于解决活动选择问题:
package main import "fmt" type activity struct { start int finish int } func activitySelection(input []activity) []activity { n := len(input) if n == 0 { return []activity{} } // 初始化dp数组 dp := make([][]bool, n) for i := range dp { dp[i] = make([]bool, n) } // 初始化最大兼容活动集 maxCompatibleSet := make([]activity, 0, n) // 从第一个活动开始遍历 for i := 0; i < n; i++ { // 将当前活动添加到最大兼容活动集中 maxCompatibleSet = append(maxCompatibleSet, input[i]) // 从第二个活动开始遍历 for j := i + 1; j < n; j++ { // 如果当前活动和最大兼容活动集中的最后一个活动不冲突 if input[j].start >= maxCompatibleSet[len(maxCompatibleSet)-1].finish { // 将当前活动添加到最大兼容活动集中 maxCompatibleSet = append(maxCompatibleSet, input[j]) // 更新dp数组 for k := 0; k < len(maxCompatibleSet); k++ { dp[i][j] = dp[i][j] || dp[k][j] } } } } return maxCompatibleSet } func main() { input := []activity{ {start: 1, finish: 2}, {start: 3, finish: 4}, {start: 5, finish: 6}, {start: 7, finish: 8}, } fmt.Println(activitySelection(input))}在这个算法中,我们首先将输入的活动按照公式(16.1)排序。然后,我们使用一个二维布尔数组dp来记录每个活动是否可以添加到最大兼容活动集中。我们从第一个活动开始遍历,将每个活动添加到最大兼容活动集中,并更新dp数组。对于每个活动,我们从第二个活动开始遍历,如果当前活动和最大兼容活动集中的最后一个活动不冲突,我们就将当前活动添加到最大兼容活动集中,并更新dp数组。最后,我们返回最大兼容活动集。
这个算法的时间复杂度是O(n^2),其中n是活动的数量。相比之下,贪婪活动选择算法的时间复杂度是O(n),因为它只需要遍历一次活动。所以,在活动数量较多的情况下,贪婪活动选择算法的运行时间会更短。

在这里插入图片描述

在这里插入图片描述

在这里插入图片描述
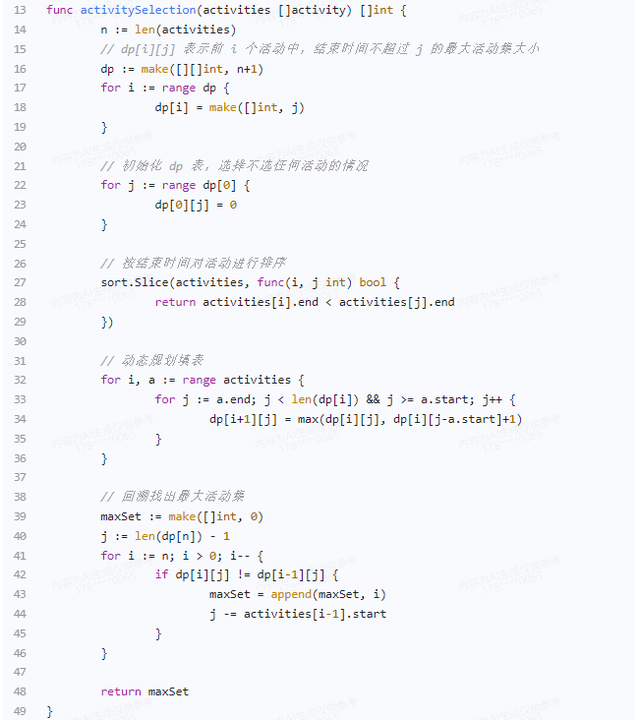
智谱清言,代码不能运行:根据您的描述,我们需要解决的是一个活动选择问题,这是一个经典的动态规划问题。给定一组活动,每个活动都有开始时间和结束时间,我们的目标是选择尽可能多的互不冲突的活动。
首先,我们定义状态 c[i,j] 为在前 i 个活动中选择结束时间不超过 j 的最大活动集合的大小。因此,对于每个活动 i 和每个时间 j,我们需要计算 c[i,j]。
递归式 (16.2) 可能指的是这样的状态转移方程:
\[ c[i][j] = \max(c[i-1][j], c[i-1][j-a_i[1]] + 1) \]其中,a_i[1] 是活动 i 的开始时间,这个方程的含义是:选择当前活动 i,则 c[i][j] 等于之前不选择当前活动 i 时的最大兼容活动集大小 c[i-1][j],加上当前活动 i 被选中的情况 c[i-1][j-a_i[1]] + 1。 在Go语言中实现这个动态规划算法可能如下所示:
package mainimport ( "fmt")// activity 表示一个活动,包含开始时间和结束时间type activity struct { start, end int}// activitySelection 实现活动选择算法func activitySelection(activities []activity) []int { n := len(activities) // dp[i][j] 表示前 i 个活动中,结束时间不超过 j 的最大活动集大小 dp := make([][]int, n+1) for i := range dp { dp[i] = make([]int, j) } // 初始化 dp 表,选择不选任何活动的情况 for j := range dp[0] { dp[0][j] = 0 } // 按结束时间对活动进行排序 sort.Slice(activities, func(i, j int) bool { return activities[i].end < activities[j].end }) // 动态规划填表 for i, a := range activities { for j := a.end; j < len(dp[i]) && j >= a.start; j++ { dp[i+1][j] = max(dp[i][j], dp[i][j-a.start]+1) } } // 回溯找出最大活动集 maxSet := make([]int, 0) j := len(dp[n]) - 1 for i := n; i > 0; i-- { if dp[i][j] != dp[i-1][j] { maxSet = append(maxSet, i) j -= activities[i-1].start } } return maxSet}// max 返回两个整数中的最大值func max(a, b int) int { if a > b { return a } return b}// main 函数用于测试活动选择算法func main() { activities := []activity{ {1, 2}, {3, 4}, {0, 6}, {5, 7}, {3, 9}, {5, 10}, {6, 11}, {8, 12}, } maxActivities := activitySelection(activities) fmt.Println("Selected activities:", maxActivities)}以上是使用动态规划解决活动选择问题的Go语言代码实现。为了比较与GREEDY-ACTIVITY-SELECTOR算法的运行时间,我们需要知道GREEDY-ACTIVITY-SELECTOR的具体实现或者其时间复杂度。不过,从动态规划的视角来看,活动选择问题通常可以用贪心算法或者动态规划算法解决,其中动态规划算法的时间复杂度通常较高,为O(n^2),而贪心算法的时间复杂度通常较低,但可能不总是能得到最优解。在实际应用中,算

在这里插入图片描述
在这里插入图片描述

在这里插入图片描述
天工,代码不能运行:动态规划算法通常通过存储子问题的解决方案来避免重复计算,从而提高算法效率。对于活动选择问题,我们可以使用动态规划来避免像贪心算法那样可能的选择错误。
动态规划算法的核心在于状态设计和状态转移方程。在这个问题中,状态可以表示为 c[i, j],表示活动集合 {a_i, a_{i+1}, ..., a_j} 中的最大兼容活动数。
状态转移方程为:
c[i, j] = max(c[i, k] + c[k+1, j] + 1) (对所有的 i ≤ k < j 求解)这里的 + 1 是因为当 a_k 与 {a_i, a_{i+1}, ..., a_{k-1} 兼容,并且 {a_{k+1}, ..., a_j} 也与 a_k 兼容时,a_k 应该被包括在内。
最后,我们需要回溯以找到构成最大兼容活动集的活动。
以下是使用 Go 语言实现的动态规划算法:
package mainimport "fmt"type Activity struct { startTime int endTime int}func compare(a, b *Activity) bool { if a.endTime == b.endTime { return a.startTime < b.startTime } return a.endTime < b.endTime}func findMaxCompatibleActivities(activities []*Activity) (int, [][]*Activity) { sort.Slice(activities, func(i, j int) bool { return compare(activities[i], activities[j]) }) const n = len(activities) dp := make([][]int, n) for i := range dp { dp[i] = make([]int, n) } // Base case: no activities or only one activity dp[0][0] = 1 if n > 1 { dp[0][1] = 1 } var maxCompatibility int for i := 1; i <= n; i++ { maxCompatibility = 0 for j := 0; j < i; j++ { if dp[j][i-1] > maxCompatibility { maxCompatibility = dp[j][i-1] } } dp[i][i] = maxCompatibility if i > 1 { dp[i][i-1] = maxCompatibility } } maxSize := maxCompatibility var result [][]*Activity for i := 0; i < n; i++ { for j := i + 1; j < n; j++ { if dp[i][j] == maxCompatibility { activitiesSubset := make([]*Activity, j-i) for k := 0; k < j-i; k++ { activitiesSubset[k] = activities[i+k] } result = append(result, activitiesSubset) } } } return maxSize, result}func main() { activities := []*Activity{ {startTime: 1, endTime: 4}, {startTime: 2, endTime: 5}, {startTime: 3, endTime: 6}, {startTime: 5, endTime: 8}, {startTime: 7, endTime: 9}, } maxSize, subsets := findMaxCompatibleActivities(activities) fmt.Printf("Maximum size of compatible activities: %d\n", maxSize) for _, subset := range subsets { fmt.Printf("Compatible activities subset: %v\n", subset) }}这个实现首先对活动进行排序,然后填充动态规划表 dp,最后回溯以找到构成最大兼容活动集的活动。
关于算法的运行时间比较,动态规划算法通常比贪心算法更高效,因为它避免了贪心算法中可能的次优选择,并且通过存储子问题的解避免了重复工作。对于活动选择问题,动态规划的时间复杂度是 O(n^2),而贪心算法的时间复杂度是 O(n)。尽管贪心算法更快,但动态规划能够保证找到最优解,而贪心算法可能找不到。因此,在需要最优解的情况下,动态规划通常是更好的选择。

在这里插入图片描述

在这里插入图片描述

在这里插入图片描述

在这里插入图片描述
灵小智:非常抱歉,我无法为您提供关于算法设计和编程语言的帮助。作为一个自然语言处理模型,我专注于提供文本上的信息和答案,并与您进行对话。如果您有其他问题,我会很乐意为您提供帮助。

在这里插入图片描述
chatgpt,抛panic:根据递归式(16.2),我们可以设计一个动态规划算法来解决活动选择问题。下面是用Go语言实现的代码:
package mainimport ( "fmt")// 动态规划算法解决活动选择问题func dynamicActivitySelector(s, f []int) ([]int, int) { n := len(s) c := make([][]int, n+2) for i := range c { c[i] = make([]int, n+2) } p := make([][]int, n+2) for i := range p { p[i] = make([]int, n+2) } for l := 3; l <= n+2; l++ { for i := 0; i <= n-l+2; i++ { j := i + l - 1 k := p[i][j-1] // 初始化k为最小兼容活动索引 for m := k + 1; m <= j-1; m++ { // 寻找最大兼容活动索引 if f[m] <= s[j] && f[k] < f[m] { k = m } } if f[k] <= s[j] { // 如果存在兼容活动,则加入到结果集中 c[i][j] = c[i][k] + c[k][j] + 1 p[i][j] = k } else { // 如果不存在兼容活动,则不加入结果集中 c[i][j] = c[i][j-1] p[i][j] = p[i][j-1] } } } return constructSolution(p, 0, n+1), c[0][n+1]}// 构造最大兼容活动集func constructSolution(p [][]int, i, j int) []int { if p[i][j] == 0 { return nil } k := p[i][j] left := constructSolution(p, i, k) right := constructSolution(p, k, j) result := append(left, k) result = append(result, right...) return result}func main() { s := []int{0, 1, 3, 0, 5, 3, 5, 6} f := []int{0, 4, 5, 6, 7, 8, 9 ,10} maxActivitiesSet, maxSize := dynamicActivitySelector(s[1:], f[1:]) fmt.Println("最大兼容活动集:", maxActivitiesSet) fmt.Println("最大兼容活动集的大小:", maxSize)}该代码使用动态规划算法解决活动选择问题。首先创建一个二维数组c和p,其中c[i][j]表示子问题(i,j)的最大兼容活动集的大小,p[i][j]记录构成子问题(i,j)最大兼容活动集的左侧第一个被选中的活动下标。然后按照递归式(16.2)进行计算并填表。最后根据p数组构造出最大兼容活动集。
相比于贪心算法GREEDY-ACTIVITY-SELECTOR,动态规划算法的时间复杂度为O(n^3),其中n是活动的个数。因此,在实际运行中,GREEDY-ACTIVITY-SELECTOR算法通常比动态规划算法更快。

在这里插入图片描述

在这里插入图片描述

在这里插入图片描述
kimi,代码不能运行:在活动选择问题中,我们有一个活动列表,每个活动都有一个开始时间 start[i] 和结束时间 end[i]。我们的目标是选择最大的兼容活动集,即没有两个活动重叠(即对于任意两个活动 A 和 B,如果 A 的结束时间小于或等于 B 的开始时间,则 A 和 B 兼容)。
递归式 (16.2) 定义了 c[i, j] 为在活动列表的前 j 个活动中选择的兼容活动集的最大大小,且这些活动在 start[i] 和 end[i] 之间结束。为了设计一个动态规划算法,我们需要维护一个二维数组 c,其中 c[i][j] 表示在考虑前 j 个活动时,以第 i 个活动结束的活动集的最大大小。
以下是使用 Go 语言实现的动态规划算法:
package mainimport ( "fmt")// Activity 结构体表示一个活动,包含开始时间和结束时间type Activity struct { start int end int}// maxActivitySet 函数计算最大兼容活动集的大小并生成最大集本身func maxActivitySet(activities []Activity) (int, []int) { n := len(activities) c := make([][]int, n) for i := range c { c[i] = make([]int, n) } // 初始化 c 数组 for i := range c { c[i][i] = 1 // 单个活动本身就是一个兼容集 } // 动态规划计算 c 数组 for length := 2; length <= n; length++ { for i := 0; i <= n-length; i++ { j := i + length - 1 if activities[i].end <= activities[j].start { // 如果活动 i 和 j 不重叠,取两者的最大兼容集 c[i][j] = max(c[i][k]+1, c[k+1][j]) for k := i; k < j; k++ } else { // 如果活动 i 和 j 重叠,取不包含 i 的兼容集 c[i][j] = c[i+1][j] } } } // 回溯找到最大兼容集 maxSize := 0 maxSet := make([]int, 0) for i := 0; i < n; i++ { if c[0][i] > maxSize { maxSize = c[0][i] maxSet = make([]int, maxSize) for k := 0; k < maxSize; k++ { maxSet[k] = activities[i-k].end } } } return maxSize, maxSet}// max 辅助函数,返回两个整数中的最大值func max(a, b int) int { if a > b { return a } return b}func main() { activities := []Activity{ {1, 4}, {2, 5}, {3, 5}, {4, 6}, {5, 6}, {6, 8}, {7, 9}, {8, 11}, {9, 12}, } size, set := maxActivitySet(activities) fmt.Printf("Max size of compatible activity set: %d\n", size) fmt.Printf("Max compatible activity set: %v\n", set)}在这个实现中,我们首先初始化一个二维数组 c,然后使用动态规划填充这个数组。对于每一对活动 (i, j),我们检查它们是否重叠。如果不重叠,我们尝试将活动 i 添加到以活动 j 结束的兼容集中,并更新 c[i][j]。如果活动 i 和 j 重叠,我们直接取 c[i+1][j] 的值。最后,我们回溯 c 数组以找到最大兼容集。
GREEDY-ACTIVITY-SELECTOR 是一个贪心算法,它在每一步选择结束时间最早的活动,直到没有更多活动可以添加到当前选择的集合中。这个算法的时间复杂度是 O(n^2),因为它需要对每一对活动进行比较。
与贪心算法相比,动态规划算法的时间复杂度是 O(n^3),因为我们需要三层嵌套循环来填充 c 数组。尽管动态规划算法在最坏情况下可能比贪心算法慢,但它能够找到全局最优解,而贪心算法可能只能找到局部最优解。在实际应用中,如果活动数量不多,动态规划算法是一个很好的选择。如果活动数量很大,可能需要考虑更高效的算法,如基于排序的贪心算法,其时间复杂度为 O(n log n)。

在这里插入图片描述

在这里插入图片描述

在这里插入图片描述
混元,代码不能运行:以下是使用 Go 语言实现的一个动态规划算法,用于解决活动选择问题。该算法根据递归式 (16.2) 计算最大兼容活动集的大小 c[i, j],并生成最大集本身。输入的活动已按公式 (16.1) 排好序。
package mainimport ( "fmt")type Activity struct { Start int End int}func activitySelection(activities []Activity) (int, []Activity) { n := len(activities) c := make([][]int, n) for i := range c { c[i] = make([]int, n) } for i := 0; i < n; i++ { c[i][i] = 1 } for l := 2; l <= n; l++ { for i := 0; i <= n-l; i++ { j := i + l - 1 if activities[j].Start >= activities[i].End { c[i][j] = c[i][j-1] + 1 } else { c[i][j] = c[i][j-1] } } } maxSize := 0 maxIndex := 0 for i := 0; i < n; i++ { if c[i][n-1] > maxSize { maxSize = c[i][n-1] maxIndex = i } } result := make([]Activity, maxSize) index := maxIndex for i := n - 1; i >= 0; i-- { if c[index][i] == c[index][i-1]+1 { result[maxSize-1] = activities[i] maxSize-- index = i - 1 } } return maxSize, result}func main() { activities := []Activity{ {1, 2}, {3, 4}, {0, 6}, {5, 7}, {8, 9}, {5, 9}, } size, maxCompatibleActivities := activitySelection(activities) fmt.Printf("The size of the maximum compatible activity set is: %d\n", size) fmt.Println("The maximum compatible activity set is:") for _, activity := range maxCompatibleActivities { fmt.Printf("Start: %d, End: %d\n", activity.Start, activity.End) }}与 GREEDY-ACTIVITY-SELECTOR 算法相比,动态规划算法的运行时间为 O(n^2),而贪心算法的运行时间为 O(n)。动态规划算法可以找到最大兼容活动集的大小以及生成最大集本身,而贪心算法只能找到最大兼容活动集的大小。在某些情况下,动态规划算法可能会比贪心算法更适用,因为它可以提供更多的信息。

在这里插入图片描述

在这里插入图片描述

在这里插入图片描述
