韩国首尔国立大学的研究人员开发出了一种新型多物体抓取机器人手MOGrip。这款抓手不仅可以同时抓取多个物体,还能像人手一样将物体灵活地在手指和手掌之间传递,实现高效的物品拾取与放置。
相关研究成果发表在近期的Science Robotics期刊上。研究团队受人手启发,利用手指的平移运动,开发出这款集手指精确放置与手掌存储功能于一体的创新抓手。

传统的多物体抓取机器人虽然也能同时抓取多个物体,但往往难以对每个物体进行精确放置。而这款新型抓手通过模仿人手将物体从手指传递到手掌储存的动作,不仅能一次移动多个物体,还能在需要时准确地将它们一个个取出并放置到期望位置。
▍抓手结构巧妙设计 融合人手灵活与机械高效
这款多物体抓手主要由4根手指和一个传送带式手掌组成。每根手指都安装在滑块上,通过两根肌腱驱动 - 一根用于抓取动作,另一根用于平移运动。

手掌部分则由一对相对的传送带构成,带表面嵌入有弹性毛发。当传送带转动时,物体可以被插入毛发之间,从而实现多个物体的同时存储和传送。
整个抓手系统仅需3个电机就能完成抓取、平移、储存和取回等全部动作。其中一个电机通过移动滑轮系统实现4根手指的欠驱动抓取,使其能够自适应地抓取物体;另一个电机则通过同一滑轮驱动4根手指的平移运动,确保手指移动距离相等;第三个电机负责驱动传送带手掌的转动。
这种设计不仅简化了人手复杂的动作,还能比人手存储更多物体。研究人员通过大量实验验证了该设计在多物体操作中的可行性和稳定性。
▍解耦连杆巧思妙用 让抓取和平移动作不再冲突
在抓手的设计中,最大的技术挑战之一是如何让手指既能稳定抓取又能平滑平移。研究团队发现,如果简单地将手指通过转动关节连接到滑块上,拉动抓取肌腱时不仅会使手指旋转,还会导致意外的平移;同样,拉动平移肌腱时也会使抓取肌腱松弛,导致抓取失败。
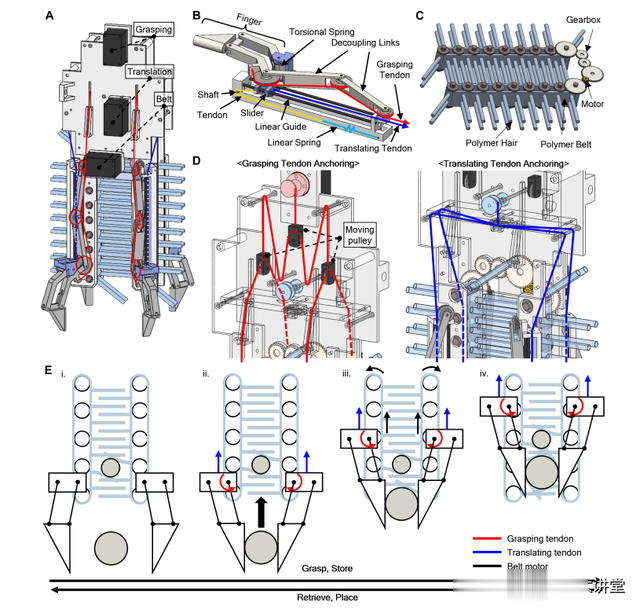
为解决这个问题,研究人员提出了一种创新的解耦连杆设计。当手指被拉向手掌时,抓取肌腱在滑轮2处释放,同时在滑轮1和3处进一步缠绕。通过精心设计滑轮半径和解耦连杆长度,可以使缠绕和释放的肌腱长度相等,从而在手指平移过程中保持抓取角度不变。
研究团队还通过建模和实验验证了这一设计。他们定义了两个无量纲变量γ和δ来描述滑轮半径和连杆长度的变化对手指运动的影响。实验结果表明,当γ=0且δ=1时,拉动平移肌腱只会影响平移距离,拉动抓取肌腱只会改变抓取角度,实现了两个动作的完全解耦。
▍多毛传送带手掌 让存储更稳定高效
传统的扁平弹性传送带在存储多个物体时往往会出现问题:对于小物体来说接触面积不足导致存储不稳定,有时甚至会出现存储失败的情况。
研究团队的解决方案是在传送带表面嵌入弹性毛发。当物体被插入毛发之间时,毛发变形产生的恢复力能将物体固定住。这种被动存储机制只需要传送带的旋转就能完成物体的传输和存储。更重要的是,由于毛发能确保与每个物体都有足够的接触面积,且变形的毛发不会影响其他物体的存储,因此可以同时存储不同尺寸的物体。

研究人员还系统研究了手掌设计参数对存储能力的影响。他们发现,存储力与毛发半径和物体尺寸都有关。随着物体尺寸增大,存储力及其增量都会逐渐增加,这是因为更大的物体会引起更多毛发变形,且接触的毛发数量也更多。
此外,当同时存储多个物体时,已存储物体不会降低存储力,反而会略微增加。这是因为额外物体会推动两个物体之间的毛发,这些被压缩的毛发会对之前存储的物体施加额外的力。
这种创新的存储机制让抓手能够稳定地存储各种尺寸的物体,为多物体操作提供了可靠的技术支撑。
▍多物体抓取显神威 大幅提升物流效率
研究团队在实验室环境下进行了模拟物流场景测试,对比了单物体抓取和多物体抓取的效率差异。结果令人振奋:在需要将4个物体分别放入两个盒子的任务中,使用多物体抓取模式时,机械臂末端的移动距离从29.5米缩短至8.5米,减少了71%;整个操作时间从89秒缩短到59秒,节省了34%。

理论分析表明,当抓手的平移和存储过程时间短于机械臂移动时间时,可以实现最高效的多物体抓取。通过对演示视频的分析,研究人员计算出理论最短操作时间约为55秒,比实际演示时间仅多6.8%。这说明目前开发的多物体抓手的平移和存储过程已经足够快速。
值得一提的是,这种多物体抓取方式在某些场景下优势更为明显:当物体之间距离较近、而拾取和放置位置相距较远时,其节省的时间和距离会更加可观。因此,该抓手特别适合物流仓储等场景,以及需要在相距较远的取放点之间移动的家庭服务机器人应用。
▍灵活应对多样场景 展现强大适应性
为了验证抓手在实际场景中的表现,研究团队还进行了办公桌整理演示。抓手依次抓取了一个小型乳液瓶和旅行牙刷,通过手指到手掌的平移将它们存储起来,然后又抓起一个剃须刀,同时搬运三个物体。随后,它将剃须刀放入杯中,取出存储的物体将牙刷挂在墙上,最后把乳液瓶放到架子上。
更令人印象深刻的是,在后续测试中,这款抓手成功完成了23种不同物体的抓取、存储、取回和放置任务。从最重的195克NI myRio设备,到最轻的0.15克巧克力包装袋,都能稳定操作,充分展现了其适应不同物体的能力。
▍未来发展与应用前景
尽管取得了显著进展,研究团队认为该系统还有进一步改进空间。例如,添加弯曲传感器或触觉传感器可以更准确地检测物体位置和姿态;增加手指的自由度则有助于在抓取过程中调整物体方向。
此外,如果能让每个手指的平移由独立电机控制,或者采用可以在夹持和包络之间被动切换的手指设计,抓手将能够处理更大尺寸的物体,进一步扩展应用范围。
研究人员表示,这种多物体抓取技术特别适合非结构化环境和需要精确放置的任务。因此,除了物流和家庭服务领域,它在工业场景下的装配、分拣等应用也很有前景。
这项研究不仅为机器人抓取领域带来了新思路,也为提高自动化系统的效率提供了实用解决方案。相信随着技术的进一步完善,这种融合了人手灵活性和机械高效性的多物体抓手,将在更多领域发挥重要作用。
