
你是否曾想象过,自己家的机器人能像人类一样,流畅地整理房间、打扫卫生?
想象一下你的机器人不再只是简单的吸尘器,而是能够把散落在房间里的书籍、衣物井然有序地归位,甚至能在你回到家前调整好光线,让你享受最舒适的回家时光。
这听起来像是未来的科幻情节,但现在,稚晖君带领的智元机器人正逐步将这些梦想变成现实。
AgiBot Digital World:机器人仿真框架的新高度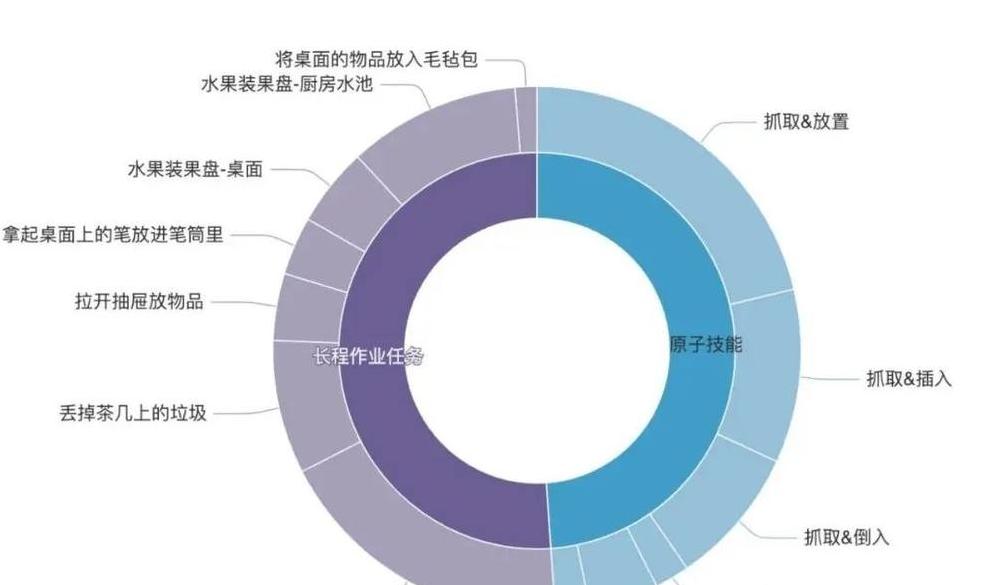
要实现机器人真正的“会整理房间”,我们需要的不仅仅是先进的硬件技术,还需要一个强大的仿真框架。
智元机器人最新推出的AgiBot Digital World便是这样的一个框架。
这个系统不仅可以进行高保真的视觉渲染,还能提供精确的物理模拟,几乎将真实生活中的任何场景搬进了电脑里。
为什么仿真框架这么重要?

在机器人学习的过程中,场景的复杂性和细节决定了机器人的智能水平。
AgiBot Digital World通过集成海量逼真的三维资产和多样化的专家轨迹生成机制,让机器人能够在模拟的环境中反复练习各种任务。
从房间一角的尘土飞扬到书架上书籍的摆放,这个系统都能毫无遗漏地模拟。
高保真视觉渲染:为机器人操作提供真实场景
我们来具体看看这个系统有多厉害。
AgiBot Digital World基于NVIDIA Isaac-Sim仿真平台,不仅能提供高度逼真的视觉效果,还能实现极其精确的物理模拟。
光透过玻璃窗的度投影、机器人移动时的倒影,这些细节都被真实地还原出来。
你可以想象一个场景,机器人正把一辆小车放入篮子,随之而来的轻微晃动和角度偏移都在仿真中被精准捕捉和再现。

这样的模拟不再是简单的静态图片,而是动态的全息场景,这使得机器人能够更准确地感知和操作各种物体。
全链路自动化数据:提升机器人泛化能力为了让机器人在实际操作中更加灵活,AgiBot Digital World还提供了全链路自动化的数据生成。
这是什么意思呢?
简单来说,这个系统不仅能模仿专家的操作轨迹,还能通过真机操作数据映射和具身智能体自动生成操作轨迹,形成一个数据闭环。
这种方式让数据不仅丰富、还具备高度灵活性。
例如,当机器人需要在书房里从书桌操作切换到立面书架操作时,系统可以一键生成取书任务,根据环境自动调整操作场景和布局。
如果需要特定的物体,系统也能调用资产库来补充,甚至切换整个场景,确保机器人操作的准确性和高效性。
可能你会好奇,这么多功能和数据到底能用在哪里?
智元机器人早已做好了准备。
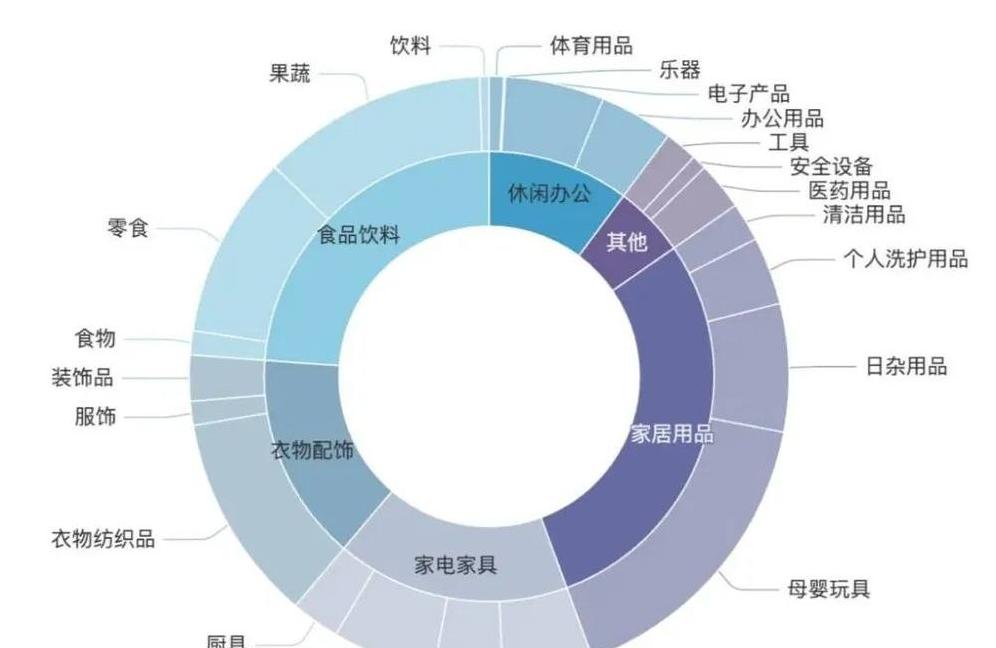
他们此次开源的仿真数据涵盖了家居、商超、办公、餐饮和工业五大主要场景,充分考虑了我们日常生活中可能遇到的各种复杂情况。

其中,家居场景是最为丰富的,占比高达36%。
不仅包括家用电器、衣物配饰,还有日常杂用品等九大品类,涵盖180多种具体物品。
这些数据都经过精细建模,材质方面涵盖木质、地毯、石制等九种主要材料。
这意味着,机器人将具备更强的适应性,能够在真实环境中灵活应对不同任务。

令人惊讶的是,这次开源的数据不仅质量高,还可以支持实现光照变化、干扰物处理、物体位置调整等,极大地提升了模型在不同环境下的表现。
无论是长程任务还是短程任务,这些数据都能为机器人提供可靠的学习资源。
结尾:升华主题稚晖君和他的团队通过AgiBot Digital World,让我们看到了机器人技术的巨大潜力。

通过高保真的仿真框架、自动化的数据生成和全覆盖的数据集,智元机器人正在为我们的未来生活带来更多的可能性。
未来的机器人不再是简单的自动化工具,而将成为我们生活中的智能助手,能够理解我们的需求,帮助我们完成复杂的任务。
这不仅仅是在技术上的突破,更是在生活质量上的飞跃。
当机器人能够像人类一样,灵活应对各种家庭事务时,我们的生活将变得更加轻松、有趣。

稚晖君和智元机器人正在为这样一个未来而努力,让我们拭目以待吧。
