研究背景
水凝胶作为一种重要的智能材料,因其具有响应外部刺激而发生形状和体积变化的特性而备受科学家的关注。然而,将功能、材质、形状和尺寸不同的水凝胶单元进行粘合以制造智能材料和软体机器人是一项具有挑战性的任务。水凝胶由于其主要成分为水而不具备固体表面的轮廓分明,因此难以进行粘合。此外,水凝胶发生体积和形状变化时,往往会对粘合层造成破坏,使得传统粘合剂难以满足其可控组装的需求。因此,如何设计一种可适应水凝胶形变并能够实现可控组装的粘合剂成为了研究的难题,尤其是对于实现智能材料和软体机器人的部件可拆卸、可重构、可编程的要求。
成果简介
为了解决这一问题,中国科学技术大学吴思教授等人联合设计了一种基于可逆光交联高分子的粘合剂,通过这种粘合剂实现了水凝胶的可控组装和软体机器人的功能控制。这种粘合剂利用了光交联的特性,可以适应水凝胶的形变并实现可逆粘合,从而解决了传统粘合剂无法解决的问题。这项研究成果发表在《Nature Chemistry》杂志上,题为《Reconfiguring hydrogel assemblies using a photocontrolled metallopolymer adhesive》。通过这项研究,他们成功地实现了水凝胶组件的可重构结构和可重新编程功能,为智能材料和软体机器人的研究提供了全新的思路和方法。

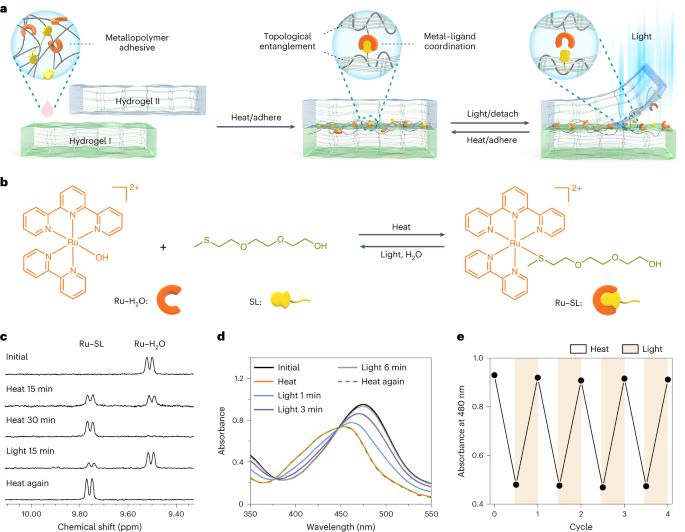
为了证明可逆Ru-S配位的机制,作者首先合成了Ru络合物(Ru-H2O和Ru-SL)和硫醚配体(SL)作为模型化合物。通过1H核磁共振(NMR)光谱分析(图1c),当Ru-H2O和SL混合物加热至70℃,Ru-H2O的信号消失,而Ru-SL的新信号出现,表明SL与Ru形成了配位键。随后,将Ru-SL溶液暴露于蓝光下,大多数Ru-SL水解成Ru-H2O。再次加热样品后,Ru-SL再次形成,证明Ru-S配位是可逆的。此外,通过紫外-可见吸收光谱分析(图1d),结果也支持了Ru-S配位的可逆性。最初,Ru-H2O和SL混合物的吸收峰值位于476nm处,加热后吸收峰值移到452nm处,这结果与纯Ru-SL相同。光照射后,吸收带恢复到初始状态,再次加热后,吸收峰值再次移到452nm处。这些结果表明了Ru-S配位键的形成和解离可以循环多次,且是稳定且可逆的。这一系列实验结果表明,金属-配体配位是一种可行的可逆粘合机制,为后续的水凝胶组装提供了基础。

为了制备可逆粘合剂,作者合成了含有钌的聚合物(P-Ru)和含有硫醚基的聚合物(P-S)。这两种聚合物在水中溶解,在70°C加热时形成凝胶。通过1H核磁共振谱显示,凝胶化是由于Ru-S配位交联引起的,再因为光诱导了Ru-S键的解离,所以用蓝光照射P-Ru/P-S凝胶可诱导凝胶-溶胶发生转变。 为了证明P-Ru/P-S混合物可以作为可逆粘合剂,作者将两个P1凝胶粘合在一起。通过加热将P-Ru/P-S溶胶置于凝胶之间,促使溶胶-凝胶转变以实现粘合。光照诱导凝胶-溶胶转变可使P1凝胶分离,分离的P1凝胶可通过再次加热并添加P-Ru/P-S溶胶进行重新粘合。拉伸剪切测试表明,P-Ru/P-S粘合剂与P1凝胶的粘附强度为1.18kPa。光照诱导的溶胶-凝胶转变使粘附强度降至几乎为零,可实现P1凝胶的分离。重新粘合的P1凝胶与初始样品具有相似的粘附强度。扫描电子显微镜观察发现,粘合和重新粘合的样品在P1和P-Ru/P-S凝胶接触点形成了相互渗透的网络结构。光照后,P-Ru/P-S网络消失,导致粘合剂的分离。这些结果表明,通过Ru-S配位交联,P-Ru/P-S混合物可作为可逆粘合剂,实现了水凝胶的可控组装和分离。
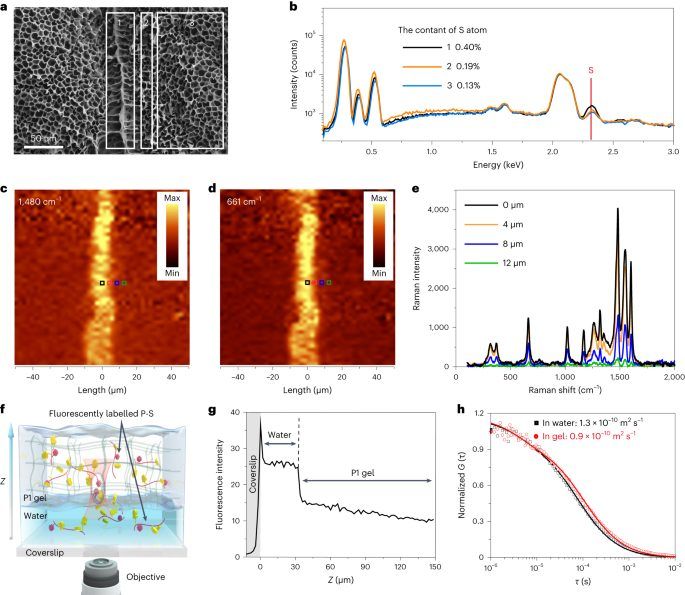
为了了解P1和P-Ru/P-S之间的交界处结构,作者采用了能量色散光谱(EDS)的扫描电子显微镜。通过测量P-S和P-Ru中的硫和钌的信号,作者展示了它们在不同区域的分布情况。EDS数据显示了在P-Ru/P-S丰富区域、交界区域和P1丰富区域的硫含量分别为0.40%、0.19%和0.13%。这表明P-S渗透到了P1中。拉曼映射技术进一步证实了P-Ru/P-S的存在,并显示出P-Ru/P-S与P1相互渗透。为了进一步理解相互渗透的机制,作者合成了荧光标记的P-S并使用荧光相关光谱(FCS)研究了其扩散。结果显示,荧光标记的P-S可以从水相扩散到P1凝胶中,尽管P1凝胶的网络结构稍微减缓了扩散速度。这些结果揭示了P-Ru/P-S粘合剂在P1凝胶交界处的分布和渗透行为,为进一步理解其粘合机制提供了重要线索础。
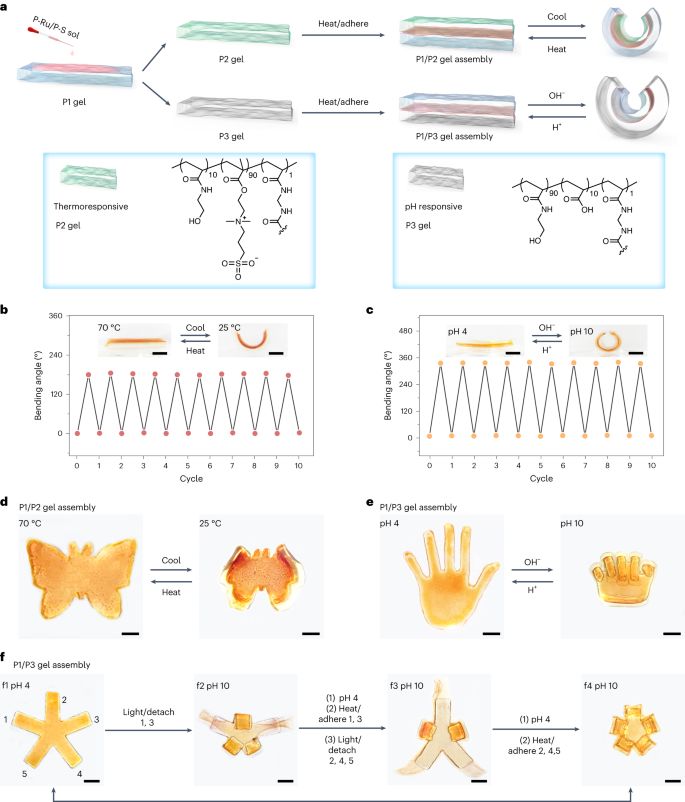
在本研究中,为了开发具有温度和pH响应性的水凝胶致动器,研究人员使用可逆粘合剂P-Ru/P-S组装了水凝胶器件并探究了其性能。首先,研究人员制备了P-Ru/P-S粘合剂,并证明了其对温度和pH的耐受性。经过不同温度和pH值处理后,P-Ru/P-S粘合的P1凝胶的粘附强度没有发生变化,这为后续的实验提供了基础。接着,研究人员设计了三种类型的水凝胶单元:惰性的P1凝胶、温度响应的P2凝胶和pH响应的P3凝胶。使用P-Ru/P-S粘合剂,他们将这些水凝胶单元组装成了P1/P2和P1/P3凝胶组件。P1/P2凝胶组件在温度变化下实现了可逆的弯曲和展开,而P1/P3凝胶组件在pH变化下触发了可逆的形状变化。 团队通过进一步实验表明,使用P-Ru/P-S粘合剂粘合的水凝胶组件表现出强大的粘附性和形状可逆性。这一特性归因于多种因素的合作:首先,Ru–S配位和聚合物链缠绕相互配合形成了牢固的粘合;其次,P-Ru/P-S粘合剂的粘附不受pH和温度影响,表现出稳定的粘合性;最后,P-Ru/P-S粘合剂作为一种水凝胶,能够在水分子的水合和脱水过程中改变形状,但同时保持其整体网络结构。通过粘合P1/P3凝胶组件制备的五臂凝胶组件的实验进一步验证了P-Ru/P-S粘合剂的强粘附性和可逆性。
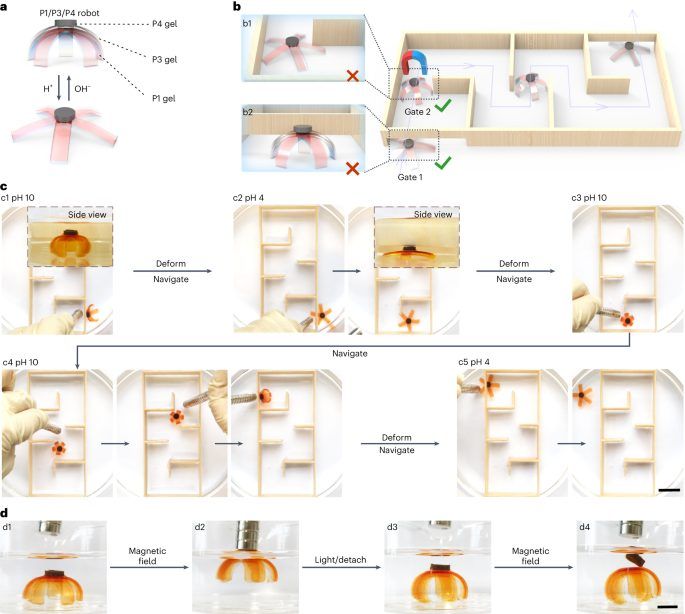
为了设计具有复杂和异质结构的软体机器人,并探索其在迷宫导航中的应用,作者利用P-Ru/P-S粘合剂将非响应性P1凝胶、pH响应性P3凝胶和含磁性颗粒的P4凝胶粘合在一起(图5a)。P4凝胶的磁性使其能够在磁场中移动,而P1和P3单元则可以随着P4单元的运动。作者证明了P1/P3/P4机器人可以在pH和磁场的调节下穿越迷宫(图5b、c),这为软体机器人在复杂环境中的应用提供了新的可能性。特别是,pH的调节能够改变机器人的形态,使其能够通过不同尺寸的通道。此外,作者通过光照分离P1/P3凝胶和P4凝胶,验证了机器人的可重构性(图5d)。这意味着机器人的各个组成部分可以灵活地重组和重用,为其在各种应用场景中的定制提供了便利。
总结展望
本研究展示了利用金属聚合物粘合剂将水凝胶单元可逆粘合成复杂、多功能的水凝胶组装体,从而为设计具有多组分、可重构、可编程功能的智能材料和软体机器人提供了新思路。通过光控制的Ru-S配位和聚合物链缠结相结合的独特设计,作者成功实现了粘合剂的强度和可逆性,与传统的胶粘剂设计不同。这一研究启示我们,可逆粘合技术为制备智能材料和软体机器人提供了一种全新的方法,未来有望应用于响应材料、生物医学和机器人领域,推动这些领域的发展。
文献信息
Liu, J., Huang, YS., Liu, Y. et al. Reconfiguring hydrogel assemblies using a photocontrolled metallopolymer adhesive for multiple customized functions. Nat. Chem. (2024). 10.1038/s41557-024-01476-2
