马斯克认准自动驾驶比拼的就是谁的AI能力强。
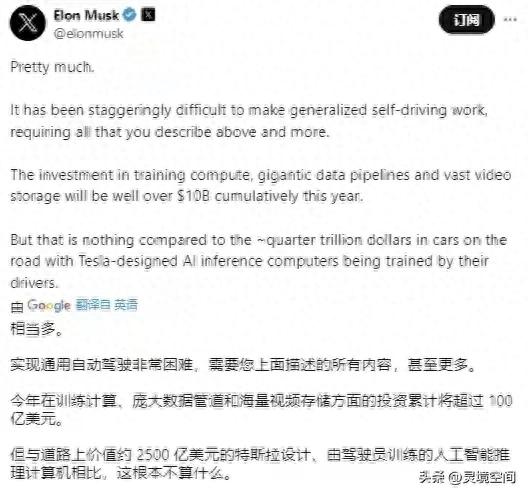
只有AI落后才使用雷达感知辅助。特斯拉正在不断投入的视觉自动驾驶方案研发将达到100亿美元,700多亿人民币。远超遥遥领先的100亿,可见在视觉自动驾驶上马斯克的豪气!

不得不说马斯克是有魄力!即使投入近1000亿也死活不用雷达感知系统,而是砸重金也要研发视觉感知自动驾驶系统。
说明马斯克已经认清未来汽车就是人工智能机器体。就像人工智能机器人一样,没有雷达感知系统,全靠视觉感知➕AI算法,一样灵活,分辨全场景。
这就好比一个超智能机器人在帮你开车一样。
马斯克对自动驾驶技术的坚定信念与巨额研发投入,不仅体现了其作为创新领袖的魄力,更揭示了他对未来汽车发展趋势的深刻洞察。
未来的汽车将不再仅是传统的交通工具,而会演变为高度智能化、自主化的移动机器人,这种转变的核心便是赋予车辆强大的视觉感知与AI决策能力,使其能够在复杂且动态变化的道路环境中实现安全、高效的驾驶。
马斯克提出的“纯视觉”自动驾驶方案,摒弃了行业普遍采用的雷达、激光雷达等传感器,转而依赖于摄像头采集的视觉数据,配合先进的深度学习算法和强大的计算平台,构建出模拟人类视觉认知系统的数字神经网络。
这一策略背后,蕴含着他对生物进化逻辑的深刻理解:人类驾驶员无需借助额外的感知手段就能在各种光照条件、天气状况以及复杂的交通场景中安全驾驶,那么理论上,经过精心训练的计算机视觉系统同样可以达到甚至超越这一水平。
特斯拉投入巨资研发的视觉感知系统,旨在解决以下几个关键问题:
环境理解与感知
通过高分辨率摄像头捕捉周围环境的高清图像,系统运用深度学习模型实时解析这些图像,识别出包括车道线、交通标志、行人、其他车辆、障碍物等在内的各类交通元素,同时精确估计它们的位置、速度及可能的行为轨迹。这一过程要求算法具备极高的精度与鲁棒性,能够在各种光照、气候和视觉遮挡条件下稳定工作。
三维空间重建与深度估计
虽然摄像头只能提供二维图像信息,但通过多视角几何、立体视觉以及深度学习中的单目深度估计技术,特斯拉的系统能够推算出场景的三维结构,这对于路径规划、避障和距离判断至关重要。这种纯视觉的三维重建能力是对传统雷达传感器功能的有效替代。
情境推理与决策制定
除了精准感知环境,自动驾驶系统还需要理解复杂的交通规则、预测其他道路使用者的行为,并在此基础上做出合理的驾驶决策。特斯拉的AI算法不仅要处理单一物体的识别,更要进行全局场景的理解,包括交通流分析、紧急情况应对以及伦理道德考量等高级认知任务。
持续学习与自我优化
特斯拉的自动驾驶系统依托于其庞大的车队网络,能够收集到全球范围内的驾驶数据,实现“影子模式”下的经验积累与在线学习。这种大规模的数据反馈机制使得系统能够持续迭代更新,不断提升对罕见或未见过场景的处理能力,确保算法始终保持前沿性和适应性。
专用硬件加速
马斯克提到的专用芯片研发,如特斯拉自研的FSD芯片,为视觉计算提供了强大的算力支持。这类芯片专为深度学习算法优化,能够在低功耗下高效运行复杂的神经网络模型,确保实时处理海量视觉数据并做出即时响应。
马斯克的纯视觉自动驾驶愿景,本质上是将汽车打造成一个超智能机器人,它不仅拥有媲美甚至超越人类驾驶员的视觉感知能力,还具备快速学习、适应和决策的AI智慧。
这一变革性的技术路线,如果成功落地,将彻底重塑汽车产业,推动社会步入无人驾驶的新纪元。尽管面临技术挑战与监管难题,但特斯拉的巨额投入与马斯克的坚定信念,无疑昭示着他们对这一未来趋势的全力押注和执着追求。
