
文丨侠说科技
一直以来,智能驾驶功能“王不见王”的局面,如今要有变化了。
本月初,有特斯拉员工在进行直播时“无意”中泄露,FSD(Full-Self Driving,“完全自动驾驶”功能)的内测版V12疑似正在中国进行测试。显然,在解决了信息安全合规问题之后,在美国大杀四方的FSD,终于有望来中国和号称遥遥领先的华为一决高下了。
不过对于FSD在中国的表现,究竟能否像在美国一样更厉害这个问题,外界一直有不少争论。一些人认为,中美两国的道路环境、交通规则和用户习惯都存在不小的区别,因此很多人认为FSD来到中国后会注定会水土不服,在华为等一众中国企业面前落得下风。
但是,几乎每一个交流的技术人士都告诉笔者,特斯拉在端到端架构上取得的领先优势,绝对不容小觑。因为在美国,已经实现量产的FSD BETA V12给到了全球车企与科技公司足够大的震撼。
那么问题来了,由特斯拉率先量产,且在国内被华为、蔚小理频频提及的端到端架构,到底是什么?特斯拉如今“仅剩”的这一项优势,其内部原理到底是什么?为此,队经过多方访谈和调研后,决定为大家科普这一前沿和复杂概念背后,技术原理和工程难点到底有哪些。

在数字时代的浪潮中,特斯拉如同一位勇敢的航海家,引领着智能驾驶的巨轮驶向未知的深海。当您在B站或是其他视频社交平台搜索“特斯拉 FSD V12”时,仿佛打开了一扇通往未来驾驶体验的大门。
那些由美国车主们分享的FSD体验视频,如同璀璨的星辰,照亮了智能驾驶的夜空。在这些视频中,特斯拉的最新系统如同一位经验丰富的驾驶者,在繁忙的美国街道上穿梭自如。无论是面对园林工人锯下的树枝,还是施工路段的桩桶,特斯拉都能轻松应对。
更令人惊叹的是,在没有红绿灯的十字路口,特斯拉能准确地遵循“STOP”标志停车,等待左侧车辆先行,展现出超越常人的智慧和判断力。这一切的背后,都离不开特斯拉智能驾驶的端到端架构。

这是一种全新的技术理念,它打破了传统模块化架构的束缚,将感知、决策规划和控制三个模块融为一体,形成了一个完整的大模型。这个模型基于海量的真实驾驶数据训练而成,能够主动学习人类的驾驶习惯,从而不断提升智能驾驶的体验。
想象一下,当您驾驶着一辆特斯拉汽车,在高速公路上飞驰时,突然前方出现了一辆紧急变道的车辆。在传统的模块化架构中,车辆可能需要经过感知模块识别障碍物、决策模块规划路线、控制模块执行操作等一系列繁琐的步骤。
而在端到端架构下,特斯拉能够凭借大模型的强大计算能力,在毫秒之间做出反应,迅速调整行驶路线,避免潜在的危险。这种端到端架构的优势不仅在于其高效性和安全性,更在于其强大的泛化能力。

在过去,面对一些“计划外”的场景,模块化架构的智能汽车往往束手无策,甚至可能引发事故。而端到端架构则能够像人类一样,凭借“经验”和“直觉”来应对各种复杂情况。它不再依赖预设的规则和策略,而是能够根据实时的道路环境和交通状况做出最合理的决策。
此外,端到端架构还极大地简化了代码量,提高了系统的简洁度和运行效率。特斯拉的FSD Beta V12系统相比过去减少了30万行代码,这不仅降低了车端的存储压力,还使得系统更加易于维护和升级。
同时,这种大模型架构也使得特斯拉在智能驾驶领域具备了更强的竞争力,有望在未来实现真正的L4级无人驾驶。然而,要实现端到端架构的量产应用并非易事。这需要大量的测试车辆和真实驾驶数据来训练模型,同时还需要解决一系列技术难题。

但特斯拉凭借其强大的技术实力和创新能力,已经在这一领域取得了显著的进展。随着技术的不断成熟和普及,我们有理由相信,在不久的将来,端到端架构将成为智能驾驶领域的主流技术,为人类带来更加安全、高效、舒适的驾驶体验。
在特斯拉的引领下,智能驾驶的巨轮正驶向更加广阔的海洋。未来,我们或许将不再需要人类驾驶员来操控汽车,而是由智能系统来完成所有的驾驶任务。这将彻底改变我们的出行方式和生活方式,让我们在享受科技带来的便利和舒适的同时,也能更加关注生活的本质和美好。而这一切,都源于特斯拉对于智能驾驶技术的不断探索和创新。
让机器像人一样开车?在智能汽车的浪潮中,不少国内企业纷纷宣称自己实现了“大模型上车”的壮举。然而,当我们深入剖析这些所谓的“端到端”技术时,不难发现它们往往只停留在感知层面的数据驱动上。
这些系统虽然能够自主识别目标物类型、道路环境特征,甚至通过高精地图实现车辆定位,但真正的PNC(路径规划与控制)决策,仍依赖于工程师预设的策略。这样的技术,虽然在业界颇为流行,但距离真正的“端到端”智能还相去甚远。
真正的“端到端”智能,应该是让车辆像人一样,在感知到前方道路环境后,能够自主思考、自主选择最优路径前进。这不仅仅是对技术的挑战,更是对智能决策系统的深度考验。为了理解这一挑战,我们首先需要探讨PNC实现端到端的过程中需要解决的难题。
想象一下,在繁忙的城市交通中,车辆需要不断地对周围环境进行感知、分析,并预测其他交通参与者的行为。这是一个极其复杂的任务,需要系统具备高度的实时性和准确性。以蔚来汽车为例,他们在智能驾驶领域取得了显著的进展。
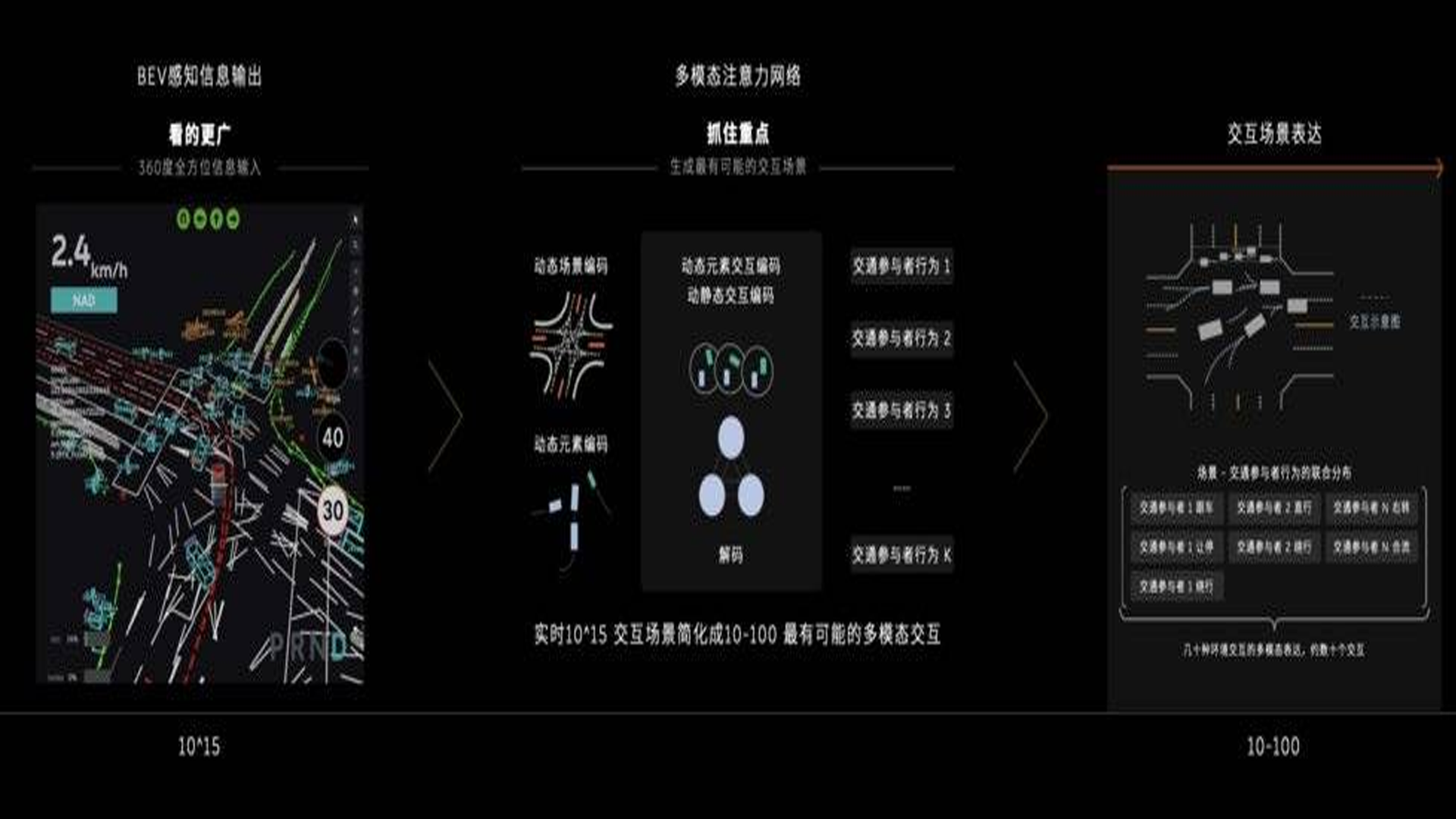
在去年的NIO IN 2023蔚来创新科技日上,智能驾驶研发副总裁任少卿分享了蔚来的端到端PNC技术架构。这一架构通过动态场景编码、动态元素编码等多种技术手段,对交通参与者的行为进行预测,并据此规划出最优的行驶路径。
然而,这一过程并非一蹴而就。系统需要不断地对环境进行感知、分析,并根据其他交通参与者的行为推演,不断调整自己的决策。在这个过程中,车辆会面临多种可能的决策选择,如让行、绕行、加速通过等。
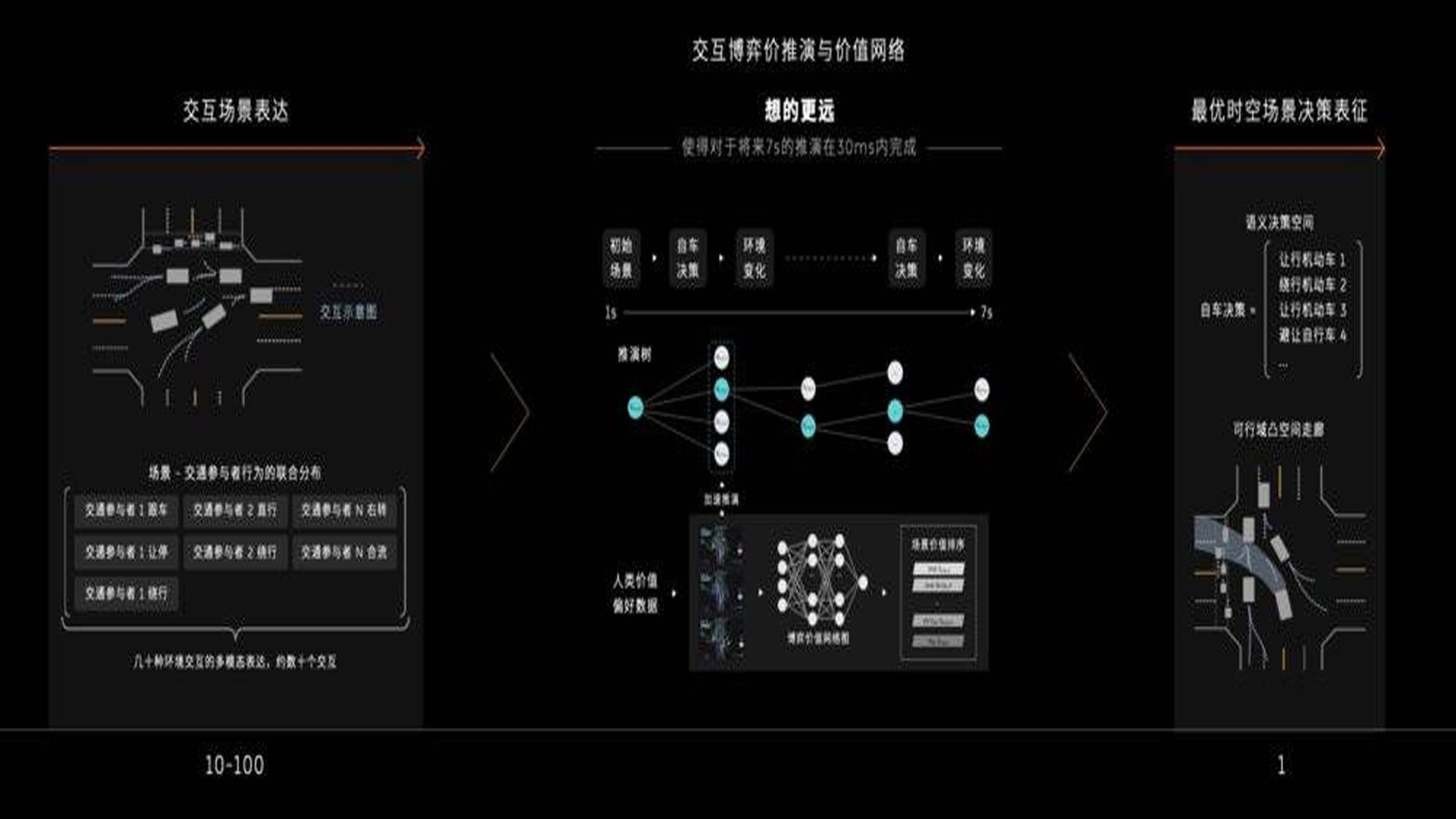
而这些决策不仅会影响到车辆的行驶路径,还会对后续的交通环境产生连锁反应。为了确保车辆能够做出最优的决策,工程师们需要为系统设置场景价值排序。这包括乘客的舒适度、通行效率、安全性以及遵循交通法规等多个方面。
通过综合考虑这些因素,系统能够选择出最符合人类价值取向的决策方案,从而确保车辆在PNC的过程中更加智能、更加人性化。然而,要实现真正的端到端智能,仅仅依靠技术是不够的。我们还需要大量的实际驾驶数据来训练和优化系统。
这也是为什么特斯拉、蔚来、小鹏等智能汽车品牌会对于用户的驾驶行为进行评分,并优先推送智驾功能给高分用户的原因。这些高分用户的驾驶行为不仅代表了优秀的驾驶技能,更是系统学习的宝贵资源。

想象一下,在未来的城市中,每一辆智能汽车都是一个独立的智能体。它们能够自主感知周围环境、预测其他交通参与者的行为、并据此做出最优的决策。这样的场景不仅将大大提高城市交通的效率和安全性,也将为我们的出行带来更加便捷、舒适的体验。
然而,要实现这样的未来,我们还需要不断地探索和创新。我们需要更加先进的感知技术、更加智能的决策系统以及更加丰富的实际驾驶数据来支撑这一目标的实现。同时,我们也需要更加开放和包容的心态来面对这一过程中的挑战和困难。
车企的标准“老鞋”,走不了端到端的新路?在智能驾驶的海洋中,我们终于找到了那颗璀璨的明珠——最佳路径的决策树。当系统在那片繁星点点的数据宇宙中绘制出“可行域凸空间走廊”时,仿佛为我们揭开了一个全新的世界。
在这片可通行的天地里,大模型不再是冰冷的算法,而是融合了全交互拓扑编码与人类价值偏好的智慧体。在它的引导下,一辆辆智能汽车如同舞者般,在右图的舞台上勾勒出最优的行驶轨迹。
然而,这看似完美的画卷背后,却隐藏着许多不为人知的挑战。许多用户或许会好奇,既然方法和路径都已经如此先进,为何端到端架构的智能驾驶还未能大规模上车呢?这其中的关键,便在于大模型的“不可解释性”与车企开发规程之间的矛盾。

想象一下,大模型如同一个深不可测的海洋,它虽然能够凭借海量的数据训练出惊人的能力,但其内部的工作机制却如同迷雾一般,让人难以捉摸。这种不透明性,让传统车企在验收智能驾驶系统时感到手足无措。
毕竟,在传统车企的眼中,一个系统只有能够清晰地解释其工作原理和决策过程,才能被视为安全可靠的。在国内某知名智能驾驶公司任职的老丁,曾经历过这样的挑战。他服务的德系豪华品牌对智能驾驶功能有着极高的要求,其开发标准细致到代码层面,包含了超过100个安全目标。
这些目标如同一个个精密的锁扣,将智能驾驶系统的安全性能牢牢锁定。然而,当端到端架构的智能驾驶系统出现时,这些锁扣似乎都失去了作用。因为在这个全新的架构中,系统的决策过程不再是一系列清晰可解释的规则,而是一个复杂而难以捉摸的黑箱。

传统车企对于功能安全和预期功能安全的追求,是基于FSC、PSC和SSR等概念进行的。然而,在端到端架构下,这些概念似乎都变得模糊不清。因为在这个架构中,系统的安全性和可靠性不再依赖于明确的规则和边界,而是依赖于一个庞大而复杂的神经网络。
这个神经网络虽然能够处理海量的数据和复杂的场景,但其内部的工作机制却如同一个深不可测的迷宫,让人难以捉摸。为了解决这个问题,一些车企开始尝试在端到端架构中添加一个“安全壳”。
这个安全壳就像是一个保护罩,能够在关键时刻接管系统的控制权,确保车辆的安全。例如,当大模型做出一个可能引发危险的决策时,安全壳中的策略规则就会立即介入,制止这个决策的执行。

这种方式虽然能够在一定程度上提高系统的安全性,但也带来了一些新的问题。比如,安全壳到底要覆盖多少场景?如果做得太大,是否就相当于回到了模块化架构的老路上?然而,尽管面临着重重挑战和困难,端到端架构的优势依然不容忽视。
它能够让车辆更加智能、更加灵活地应对各种复杂的交通场景。而且,随着技术的不断进步和数据的不断积累,我们有理由相信,未来的端到端架构将会变得更加成熟、更加可靠。在这个充满挑战和机遇的时代里,我们期待着那些敢于创新、勇于探索的车企能够为我们带来更多的惊喜。
或许在不久的将来,我们就能够驾驶着搭载端到端架构的智能汽车穿梭在城市的街头巷尾了。那时的我们,将会感受到前所未有的便捷和安全。而这一切的背后,都离不开那些默默付出、不懈努力的工程师们。他们用自己的智慧和汗水,为我们描绘出了一个更加美好的未来。

特斯拉的自动驾驶hw4.0都是华为的还打什么[呲牙笑]
我,试驾了特斯拉麻豆Y,小米su7,最终定问界M9,8月28日已提车。