在现代科技飞速发展的时代,机器人已经逐渐走进我们的生活,从工业生产线上的高效助手,到家庭中的智能伙伴。但你是否想过,机器人内部是如何实现各个部件之间高效协作与信息传递的呢?答案就是机器人内部的总线,它就像是机器人的 “神经系统”,承担着至关重要的角色。
机器人内部总线是什么
简单来说,机器人内部总线是一种连接机器人各个部件的通信线路,能够在不同的硬件组件之间传递数据和控制信号。通过这条 “信息高速公路”,机器人的大脑(控制器)可以向各个执行机构(如电机、传感器等)发送指令,同时也能接收来自这些部件的反馈信息,从而实现机器人的精确控制和稳定运行。
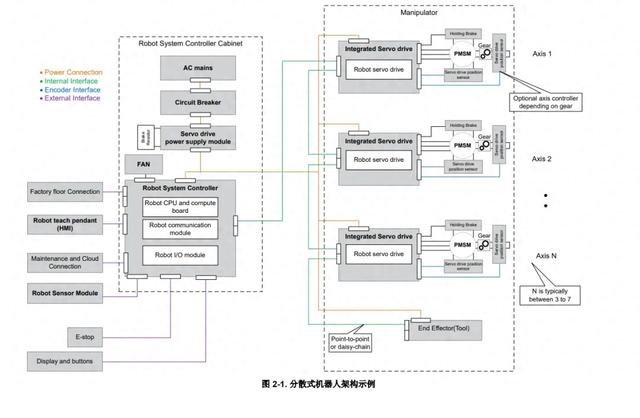
如图所示,在复杂的机器人系统中,需要支持多个通信接口,并且可能会混合使用不同接口。上图显示了一个分散式机器人系统,该系统具有多条通信接口路径,每条路径的规格都不相同。
总线的作用
数据传输:确保机器人各部件之间能够快速、准确地交换数据。比如,传感器采集到的环境信息(如距离、温度、光线等),需要通过内部总线及时传输给控制器,以便机器人做出相应的决策。
同步与协调:协调不同部件的工作节奏。在机器人执行复杂任务时,多个关节的电机需要协同工作,内部总线就能够保证各个电机按照预定的顺序和速度运转,实现机器人动作的流畅性和精准性。
控制信号传递:将控制器发出的控制指令传达给各个执行部件,使机器人能够按照预设的程序完成各种动作,如行走、抓取、搬运等。
随着设计人员不断探寻新的方法来实现更短的周期时间和更高的吞吐量,从而满足大数据要求,使带宽更宽的系统以超高效率工作,并更大限度地缩短停机时间,他们也希望通过重复使用现有布线基础设施来更大限度地减少对升级的影响。大多数系统还采用高级功能,例如更智能的诊断、更高的安全规格以及更快、更好的实时特性来进行电机控制。
控制系统通信是运动控制器和其他各个部件的信息传输,如传感器的数据需要传给控制器,控制器的指令需要传给执行器等。目前主要的控制总线有串口总线RS232/RS485、CAN、EtherCAT、PROFINET、POWERLINK、PROFIBUS、SERCOS、Ethernet、Modbus、CC-Link、MECHATROLINK等等。考虑到足式机器人控制系统的带宽、稳定性与性价比等因素,目前足式机器人主要采用串口RS232/RS485、CAN、EtherCAT这三类总线。
总线、协议和接口
需要了解总线,先了解这三个不同概念:总线、协议和接口。
总线:主要功能是提供数据传输的物理通道,实现设备之间的电气连接和信号传输。它决定了数据传输的带宽、速度和方向等物理特性。
协议:侧重于规范数据传输的逻辑规则,确保数据能够准确、可靠地在设备之间进行交换。协议定义了数据的格式、传输的流程和错误处理的方法等。
接口:结合了物理和逻辑两方面的特性。物理上,接口表现为各种插头、插座;逻辑上,它规定了数据传输的格式和电气特性等规则。
其中,总线提供数据传输通道,协议规范数据传输流程,接口进行信号转换与适配。
常见的机器人内部总线类型
CAN 总线:即控制器局域网(Controller Area Network),它具有高可靠性、抗干扰能力强、成本较低等优点。CAN总线由德国博世在 20 世纪 80 年代初为汽车电子控制系统开发。当时,汽车中电子设备不断增加,传统布线方式难以满足需求,CAN 总线应运而生,它以多主通信、高可靠性和实时性强等特点有效解决了这一问题,最初成功应用于奔驰汽车。随着时间推移,1991 年博世公司发布 CAN 2.0 协议规范,将其分为 CAN 2.0A(标准帧)和 CAN 2.0B(扩展帧),进一步提升了数据传输能力和灵活性。国际标准化组织也在 1993 年将其确定为国际标准 ISO 11898。之后,CAN FD(CAN with Flexible Data Rate)协议出现,大幅提高了数据传输速率,满足了日益增长的大数据量传输需求。
除了汽车,在工业应用场景中,CAN 总线表现也十分出色。在工业自动化领域,它用于连接可编程逻辑控制器(PLC)、传感器和执行器等设备,实现设备间的实时数据通信和协同工作,如自动化生产线中的机器人控制、物料输送系统等。在电力系统中,CAN 总线被用于监测和控制电力设备,像变电站的开关状态监测、电力参数采集等,保障电力系统的稳定运行。在电梯控制系统里,CAN 总线可连接电梯的各个部件,如轿厢控制器、门机控制器、楼层传感器等,实现高效可靠的运行控制和故障诊断。此外,在智能建筑领域,CAN 总线可用于连接照明系统、空调系统、安防系统等设备,实现智能化的集中管理和控制。总而言之,CAN总线非常适合连接各个关节的电机驱动器和传感器,确保机器人的稳定运行。
EtherCAT 总线:以太网控制自动化技术(Ethernet for Control Automation Technology),是一种基于以太网的现场总线系统。EtherCAT(Ethernet for Control Automation Technology)总线由德国倍福自动化有限公司在 2003 年首次提出,它是一种基于以太网的现场总线技术。诞生之初,工业界急需一种高速、高效且低成本的通信解决方案,EtherCAT 应运而生,凭借其突破传统以太网在工业自动化应用局限的特点,迅速获得关注。它的最大特点是数据传输速度极快,能够实现纳秒级的同步精度。EtherCAT仅使用了物理层、链路层、应用层三层协议,与多数传统的现场总线相同,但相比于其它实时以太网协议,如PROFINET、EtherNet/IP等,其协议栈更加精简。因此它具备超高速的数据传输能力,能够在极短时间内完成大量数据的交换,满足机器人实时控制需求,使机器人可以快速响应指令,实现高精度的运动控制。其分布式时钟技术可确保网络中所有设备的时钟精确同步,让机器人各关节动作协调一致,避免因时间偏差导致的运动误差。
在对实时性要求极高的机器人应用中,如协作机器人和高速分拣机器人,EtherCAT 总线能够让机器人快速响应外部信号,实现更加灵活和精准的操作。一个最直观的证明就是新加坡樟宜机场的“雨之舞”,基于高性能,高实时性,拓扑结构的灵活性等特点,EtherCAT 技术完美解决了来自 1216 根伺服轴实时同步带来的挑战。
串行总线:串行总线类型有很多,其中RS - 485总线也许是机器人中最广泛的应用,它采用差分传输方式,具有较强的抗干扰能力,传输距离较远,成本相对较低。在一些对通信速度要求不高,但对成本和可靠性有一定要求的简单机器人系统中,比如一些小型的教育机器人或简单的服务机器人。RS - 485 本身并没有严格定义通信协议,在实际应用中,需要配合特定的通信协议来实现数据的有序传输和设备之间的协调工作。常见的基于 RS - 485 总线的通信协议有 Modbus RTU协议,它定义了数据帧的格式、通信规则、功能码等内容,使得不同厂家生产的设备能够在 RS - 485 总线上进行互操作。此外,用户也可以根据自己的需求自定义通信协议。
总结
随着机器人的发展,也许会有更专业的针对机器人的协议诞生,或者其他行业或工业的某些标准总线经过修改切入机器人体系中,比如CAN或者Ethercat等的历史演进。
另外,考虑到线缆的复杂性,SPE(单对以太网)可能会在机器人领域取得较大进展,取代现有的双对以太网,从而节约线束、简化布线并增强可靠性。
喜欢我们的文章吗?欢迎在wx关注我们的订阅号:机器人开发圈(ID:RoboticsDevelopers),浏览更多机器人相关内容。
