生物制造技术有多牛?科学家们正用光、磁、声三种超能力,把细胞、组织像搭积木一样组装起来!光驱动,就像用光镊子精准抓取细胞,能搭出复杂3D结构,但速度慢了点。磁驱动,靠磁场指挥细胞排列,成本低,不过得用磁性材料。声驱动,用声波的力量,能同时操纵超多细胞,超适合大规模组装。
*本文只做阅读笔记分享*
一、生物组装技术的重要性与现状
我们都知道,大自然是非常神奇的,生物系统从微观到宏观都有着精妙的多尺度组织。细胞就像一个个精密的小工厂,有着复杂且有序的结构,而细胞周围的分子和大分子会聚集在一起,形成细胞外基质。蛋白质就是一个很好的例子,它的功能依赖于分子层面的一级结构和宏观的重组。所以,构建生物系统的空间复杂性就显得尤为重要,这不仅能模仿体内的真实结构,还能调控细胞的微环境。

生物制造技术就像是生物医学领域的神奇魔法棒,它能实现细胞、生物材料和生物活性物质的自动化时空沉积和控制,在体外建模和再生医学中有着巨大的潜力。

目前生物制造技术主要分为生物打印和生物组装。生物打印能直接安排细胞、材料和生长因子的时空位置,比如常见的挤压式3D生物打印,通过压力把生物墨水从墨盒中挤出,打印出想要的形状。还有用机械臂放置细胞球的方法,但这些技术都存在一些问题,比如制造速度慢,而且2D切片会影响复杂设计的精度。

生物组装则是通过制造含有细胞的构建块来创建人工组织。早期人们利用重力来制造细胞聚集体,像悬挂滴法,就是靠重力形成细胞球,但这种方法在制造大尺寸细胞构建体时效率很低。

后来也有自动化的微操纵技术,像介电捕获,利用非均匀电场来操纵细胞,但同时操纵多个细胞还是比较困难。这些技术的局限性促使科学家们不断探索新的方法,这就是我们接下来要讲的光、磁、声驱动的生物组装技术。

二、光驱动生物组装技术详解
(一)光学力的奥秘
光驱动生物组装技术的核心是光学力,它是怎么产生的呢?其实,光学力源于光和物体之间的动量交换。当光照射到物体上时,如果物体的尺寸比光的波长小或者差不多,我们可以用偶极近似或全波光学方法来理解光的作用;要是物体比光的波长大,就可以用射线光学近似。

我们来想象一下,光子就像一个个小小的能量包,每个光子都带有能量和动量。当一束光照射到物体上,光子与物体相互作用,就会产生力。如果光垂直照射到一个完全反射的表面,光子会被完全反射,根据牛顿第三定律,就会对表面产生一个力。在实际情况中,表面通常是部分反射的,光也不是垂直照射,这时就需要根据菲涅尔系数和斯内尔定律来计算光的反射、折射和产生的力。而且,要让光对物体产生力,物体和周围介质的折射率得有差异才行。对于非球形的粒子,还会受到光学扭矩的作用,使粒子的长轴沿着光的传播方向排列。
(二)光驱动生物组装技术应用
光镊是光驱动生物组装技术的一个重要应用,它在很多生物物理实验中都有大用处。但是早期的光镊有个问题,就是激光的功率会让温度升高,这对生物样本可不好。比如说,用氩离子激光照射细胞,细胞很容易死亡甚至破裂。后来科学家们发现,把激光波长切换到红外线,就能减少水和生物材料对光的吸收,降低热效应。

利用光镊的位置控制能力,科学家们能实现很多有趣的实验。比如,用细胞大小的微滴构建复杂的2D和3D双层液滴界面网络,通过精确控制微滴的位置,让它们相互接触并连接在一起,形成各种复杂的结构。还有用光学镊子操纵单个细胞,把它们聚集在一起形成特定形状的细胞聚集体。

不过,传统光镊一次只能操纵一个粒子,效率有点低。为了解决这个问题,全息光镊就诞生啦!它就像是光镊的升级版,基于计算机生成全息图的原理,能实现多点操纵和对微观物体的方向控制。通过实时改变全息图的配置,就能动态地操纵多个粒子。科学家们用全息光镊把小鼠胚胎干细胞构建成特定的3D结构,还能在共培养体系中对不同类型的细胞进行精确的图案化操作,构建出复杂的细胞微环境。

三、磁驱动生物组装技术探秘
(一)磁力的作用原理
接下来我们看看磁驱动生物组装技术,它的基础是磁力。经典的粒子磁操控是基于磁泳力,对于球形粒子,磁泳力的大小和粒子、介质的磁化率差异,粒子的体积,以及磁场强度的梯度都有关系。根据粒子和介质磁化率的不同情况,会出现正磁泳和负磁泳两种现象。
如果用的是铁磁、顺磁或超顺磁粒子,放在非磁性介质中,粒子就会朝着磁场强度高的地方移动,这就是正磁泳;要是用的是抗磁粒子,放在强磁性介质中,粒子就会朝着磁场强度低的地方移动,这就是负磁泳。除了磁泳力,细长的磁性粒子还会受到磁转矩的作用,让粒子旋转并与磁场线对齐。而且,磁性纳米和微米粒子在均匀磁场中还会相互作用,组装成链状或棒状结构。

(二)磁驱动生物组装技术应用
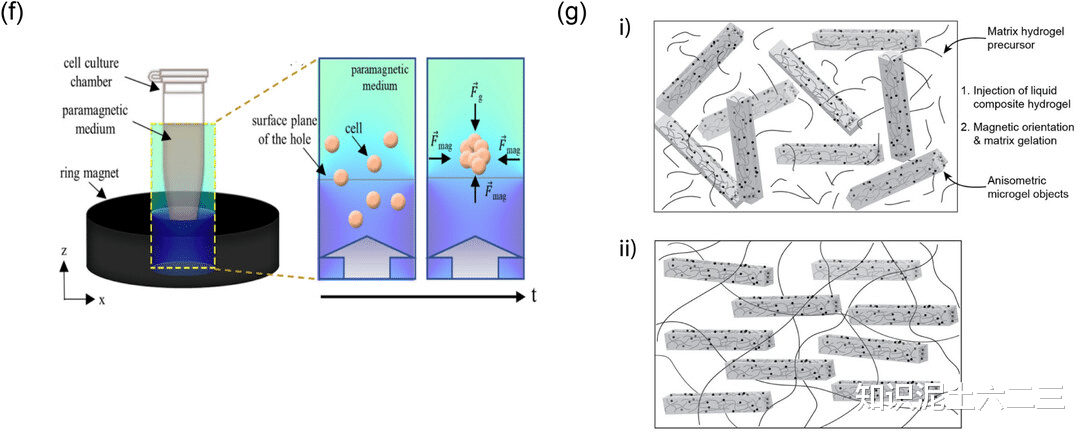
磁驱动生物组装技术在细胞和组织工程领域有很多应用。比如说,利用磁悬浮技术进行3D细胞培养,把含有磁性纳米粒子的水凝胶和细胞混合,施加外部磁场后,细胞就能在气-液界面悬浮并组装成3D结构,像细胞聚集体和球状体。还有,通过磁性标记细胞,在磁性支架上实现细胞的3D图案化,先把一种细胞用强磁场梯度引导到支架的一侧,再用相反的磁场配置引导另一种细胞,就能实现两种细胞在支架内的清晰分离。

不过,这种方法也有一些局限性,比如材料可能会引发感染,支架的机械稳定性不好,还可能引起免疫反应。为了避免这些问题,科学家们尝试用远程控制不同的“磁化”细胞类型,实现无支架的组织构建。还有研究用磁性微球来制备水凝胶,让水凝胶中的纤维按照磁场方向排列,模仿结缔组织的结构。另外,通过设计特殊的磁性结构,比如微加工的镍网格,能更好地控制负磁流变力,实现对磁性和非磁性物体的同时操控。
四、声驱动生物组装技术解析
(一)声学力的奇妙之处
现在我们来了解一下声驱动生物组装技术,这里面的关键就是声学力。当一个液滴或胶体粒子悬浮在声场中时,会受到声辐射力的作用。声辐射力是声波直接作用在粒子上产生的,它的大小和粒子、流体的密度、可压缩性,以及振动流体的动能和势能都有关系。这个力需要粒子和流体的性质有差异,而且和粒子的大小成正比。
除了声辐射力,多个液滴还会受到二次声辐射力,也叫粒子间力或比耶克内斯力,它能促进液滴的合并。在声学实验中,粒子还会受到声学流体力的作用,这个力和粒子的半径、流体的粘度,以及声学流场和粒子速度的差异有关。另外,法拉第波也是声驱动生物组装技术中的一个重要现象,它通常出现在两种流体的界面上,由流体的垂直振动产生。法拉第波能在“海底”附近产生流体流动,利用这个流动可以引导粒子在特定位置组装。

(二)声驱动生物组装技术应用
声驱动生物组装技术有很多不同的实现方式。表面声波(SAW)是其中一种,它通过压电元件、叉指换能器和频率发生器来产生。叉指换能器把频率发生器的信号转换成表面声波,在流体中形成压力场,就能操纵粒子了。通过改变激发频率,还能控制压力节点和波腹的位置,实现对粒子或细胞在二维空间的自由操纵。科学家们用表面声波成功地捕获了不同形状和大小的粒子,还能把细胞组装成各种图案,甚至能操纵整个生物体。

体声波(BAW)也是一种重要的技术,它通过压电陶瓷换能器产生平面波,平面波在液体或水凝胶中传播,遇到反射器反射后形成驻波。科学家们利用体声波来组装细胞构建块,比如构建多层神经组织,还能把生物打印和声学图案化结合起来,提高细胞的浓度。

声学全息技术则为声驱动生物组装带来了新的突破。它能控制复杂的三维声场,通过定义目标图像,利用迭代角谱方法获取相位,再通过3D打印的透射全息图把平面波转换成压力场,实现粒子在高压位置的组装。还有,利用法拉第波组装(FWA)技术,依靠移动流体对粒子的拖曳力来组装粒子。FWA技术有很多优点,比如实验装置简单、成本低,能快速制造大尺寸样品,还能同时操纵大量粒子,在生物制造中有着很大的潜力。

五、技术对比与未来展望
光、磁、声驱动的生物组装技术各有优劣,与传统光基3D打印技术相比,在打印速度、通量和精度等方面存在差异。未来研究应聚焦于将非接触式生物组装平台与光基生物打印方法相结合,发挥各自优势,实现高通量、低成本且生物相容性好的生物制造。
六、一起来做做题吧
1、关于生物系统的组织与生物制造技术,以下说法正确的是?
A. 细胞的结构简单,对生物系统功能影响不大
B. 生物打印和生物组装是完全相同的技术
C. 生物系统的多尺度组织对其功能至关重要
D. 现有生物制造技术没有任何局限性
2、在光驱动生物组装技术中,光学力产生的必要条件是?
A. 粒子尺寸必须小于光的波长
B. 粒子与周围介质的折射率存在差异
C. 光必须垂直照射物体表面
D. 物体必须是完全反射的表面
3、磁驱动生物组装技术中,关于磁泳力的说法,正确的是?
A. 磁泳力与粒子和介质的磁化率差异无关
B. 正磁泳是抗磁粒子在强磁性介质中的运动现象
C. 负磁泳中粒子朝着磁场强度高的地方移动
D. 磁泳力大小与粒子体积有关
4、在声驱动生物组装技术里,以下哪种力不是粒子在声场中受到的力?
A. 声辐射力
B. 电磁力
C. 二次声辐射力
D. 声学流体力
5、综合比较光、磁、声驱动的生物组装技术,下列说法错误的是?
A. 光驱动技术精度高但通量低
B. 磁驱动技术可扩展性强且成本低
C. 声驱动技术细胞相容性差
D. 三种技术都有各自的局限性
参考文献:
Natta, M., et al. Advanced Contactless Bioassembly Approaches: Leveraging Sound, Optical, and Magnetic Fields. Adv. NanoBiomed Res. 2400097.