从辅助人体四肢的身体增强型设备,到增设额外机械臂的身体扩展型装置,近年来,随着技术的不断革新,可穿戴机器人发展迅速,已并被广泛应用于物理救援、医疗、农业、娱乐等各多个领域。其中,增设额外机械臂的可穿戴机器人,即外附机械臂(Supernumerary Robotic Limbs, 以下简称SRL),作为一种人体机能扩展工具,有望为人类能力带来前所未有的能力拓展,也因此而得到业内诸多关注。

然而,关于SRL的研究虽已持续多年,但多数成果在力量输出——即机器人所能提供的最大关节扭矩和相应任务执行能力,以及可达范围——包括自由度的数量和最长连接部件的伸展长度方面,仍未达到与人类自然肢体相当的水平。这一现状在一定程度上制约了SRL在轻量级物体操作、娱乐活动等需要高度灵活性和精确控制领域的应用拓展。此外,早期SRL设计中采用的肌腱驱动系统也面临着可达性挑战,尤其是导线布局问题。现有方案多为尝试将导线固定点远离机械结构,以增加操作前的缓冲空间。然而,在可穿戴机器人有限的设计空间内,这种设计策略实施起来颇为困难。开发Vlimb,实现性能与实用性兼具针对上述问题,来自东京大学的研究团队进行了深入探索,并针对SRL存在的肌腱驱动机制问题,提出了一种创新的无源环结构解决方案。该方案将导线的固定点连接至一个可移动的环上,既保证了与人类相似的可达性,又有效避免了导线缠绕问题。通过革新SRL的布线机制,研究团队进一步解决了线驱动系统中广泛可达性的难题,成功地在机器人系统的力量与灵活性之间找到了平衡点。
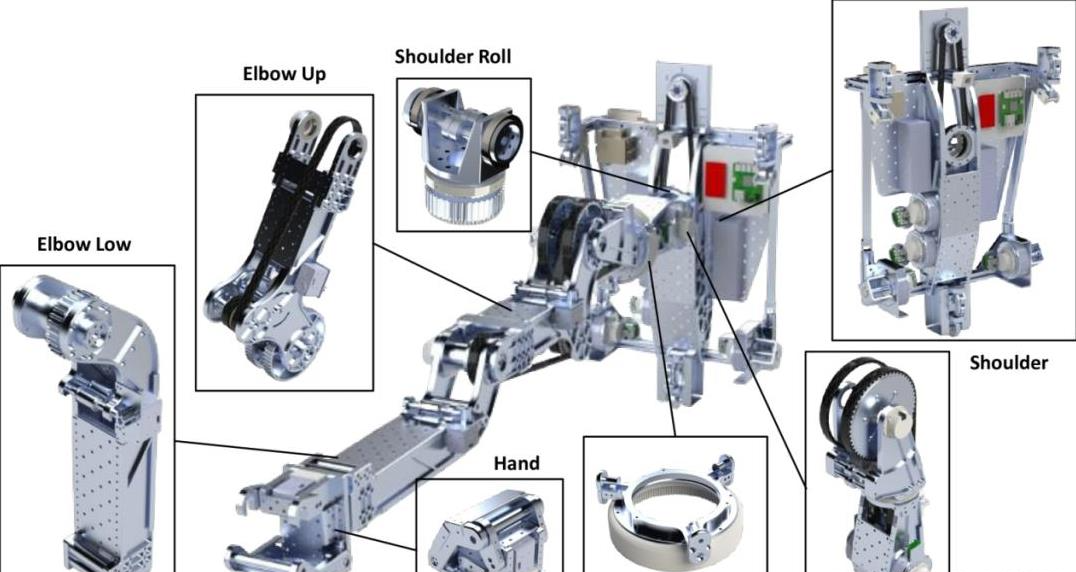
Vlimb 的整体机制在开发过程中,研究团队还发现SRL线驱动系统中,电线的配置对同一关节结构的性能有着显著影响。为此,他们提出通过为不同任务定制线材布局,使同一设备既能胜任需要精细操作的任务,也能承担重负荷的举重工作。基于上述创新,研究团队设计并开发了一款集提升与操作功能于一体的线驱动可可穿戴机器人Vlimb。该可穿戴机器人不仅具备举起重物(一个人)的能力,还能执行精细操作任务。利用其独特的肌腱驱动机构设计,Vlimb的布线系统能够灵活适应从精细操控到重力提升的各种需求。同时,通过引入无源环结构,Vlimb在力量与可达范围方面达到了与人类肢体相近的水平。通过进行初步试验,研究团队验证了该设计对机器人性能与实用性的有效提升。那么,Vlimb具体是如何被设计并实现的呢?接下来,和机器人大讲堂一起来对Vlimb的设计细节与实现原理进行更深入探索!采用线驱动机构,实现轻量化设计一般来说,要制作兼具力量输出和可达范围的SRL其核心要求有三:一是确保设备足够轻便,便于人体携带;二是具备类似人类肢体的可达性;三是拥有足够的力量,能够辅助或替代人体完成某些任务,如举起重物。为了实现这些目标,研究团队采用了线驱动机构,这一机构由用于缠绕导线的滑轮、定义机构内导线路径的航路点部分和用于施加力的末端三大部分构成。通过线驱动的设计,Vlimb在保持结构轻量化的同时,实现了高齿轮减速比、紧凑的电机布局,以及在与环境交互时的高度反向驱动性和灵活性。
线驱动驱动的组件在材料选择上,为了进一步减轻重量,研究团队选用了铝作为Vlimb的主材料,并通过铣削和型腔加工等精细工艺进行进一步减重处理。此外,考虑到机构设计的便捷性和重量分布,研究团队还在可能的情况下用皮带替代了部分机械结构,最终将Vlimb的总重量控制在16.3公斤,使其能够轻松附着于人体。调整Wire Waypoint,平衡力量输出与可达范围在线驱动机器人的设计中,链接的配置和线路径点的位置对机器人的力量输出和可达范围有着至关重要的影响。可穿戴机器人面临的一大挑战就是如何在同一设备中兼顾这两方面性能,而不使设备变得过于沉重,人类无法携带。为解决这一难题,研究团队提出了使用有线航路点更改在两种模式之间转换的方法。这种方法使得Vlimb能够在力量输出强大的Power Mode和可达范围广泛的Manipulation Mode之间灵活切换。在这种设计下,设备的机械结构保持不变,但通过改变电线是否穿过航点,即可实现关节扭矩和自由度的不同组合。在Power Mode下,线驱动铰接的力矩臂比操纵模式长了五倍以上,举升能力大大提升;而在Manipulation Mode下,则通过增加自由度来拓宽操作范围。
Vlimb配备了三种类型的有线航路点,其中,(A)类航路点充当电线在特定位置的锚定机制,确保电线在固定点所在平面内稳定移动;(B)类航路点实现肩关节处无源环的动力传输,支持更为复杂的三维运动;(C)类航路点则具备模式切换功能。这些设计细节确保了Vlimb在不同应用场景下的高效性和灵活性。

航点的设计 此外,为了满足Power Mode下的提升力需求,研究团队精心选择了电机和滑轮等关键部件。据计算,提升一名成年男性(假设体重为60公斤)所需的力大约为600牛顿。为确保安全,研究团队将电机的最大输出力设定在约1500牛顿。考虑到负载需求,研究团队选用了直径为12毫米的铝制滑轮作为收紧轮,该电机在最大输出时需提供3.6至9牛米的扭矩范围。基于这些参数,团队最终决定采用AK系列的AK60-6型号电机。同时,鉴于系统各连杆框架承受的巨大力量,研究团队为了增强结构的稳固性和耐用性采用了两个厚度为10毫米的加厚铝制部件和两个1.5毫米厚的钣金部件的组合设计作为Vlimb的连杆框架,并整体结构设计成坚固的箱形结构抵抗扭转变形。
两个链节之间的导线交叉如何由于在旋转方向上滚动运动而围绕尖端链节扭曲Passive Ring,提升结构可访问性在传统线驱动系统中,导线往往被限制在链路的纵轴方向上移动。这种设计容易导致一个问题:当存在垂直于导线张力方向的运动时,导线可能会缠绕在链节上,这些链节同时扮演着通道和固定点的角色,进而限制了机器人Roll方向(即滚动方向)的运动范围。为解决这一难题,过往研究曾尝试将固定点设置在远离链节的位置以提高可达性,但在设计空间受限的可穿戴机器人领域,这种方案实施起来颇为困难。Vlimb的设计中,研究团队引入了一种无源环结构(Passive Ring),解决了传统线驱动机器人中导线缠绕和可达范围受限的问题。
被动环机制的设计,红线表布线在这一设计中,研究团队开发出了一种Ring Roll机构。该机构通过在链节上的固定点和链节本身之间放置轴承,使得无源环能够以一种无源方式自由旋转,从而最大限度地减少钢丝在张力下的行进距离。在链节运动时,环能够无源旋转,从而最大限度地减少导线在张力下的行进距离和缠绕风险,防止缠绕的发生。这一设计使得Vlimb在滚动方向上实现了完整的360度全面可达,进而为可穿戴机器人的灵活性和功能性开辟了新的可能。Vlimb的系统架构与控制策略Vlimb系统集成了6个无刷电机与6个关节编码器,构建了一个精密的控制系统。每个电机驱动器均具备与关节编码器双向通信的能力,这一特性对于精确调控电机位置至关重要。鉴于系统对电流指令的精确性有着严格要求,并需保持高频控制以确保响应速度,研究团队选用了基于FPGA(现场可编程门阵列)的电机驱动器,以实现实时的电机控制。
Vlimb 系统概述相较于主体运动,末端执行器的细微动作及航路点的微调对功率需求较低,且无需即时响应。因此,研究团队将降低功耗作为此部分设计的核心目标。为此,他们选择了伺服电机,并通过USB接口进行高效操控。系统控制器内部维护着详尽的关节角度信息,以及实时的导线长度与张力数据,这些数据分别通过“Joint Posture”(关节姿态)与“Wire Posture”(导线姿态)两种标准数据结构进行管理。每当从设备获取到最新数据,控制器都会立即更新,并将这些信息传递至控制台以供用户查看。用户可通过控制台界面轻松输入期望的关节角度。针对每个设定的角度,控制器会运用三阶样条插值算法,计算出每个时间步长对应的指令角度,并将这些指令发送至各执行设备。
Vlimb 控制器在确定了目标角度与当前关节状态后,控制器会综合考虑前馈项(如重力扭矩)与反馈项(如比例控制),以精确计算出所需的关节扭矩。重力扭矩的计算依赖于Pinocchio物理引擎库。随后,利用肌肉长度雅可比矩阵,将关节扭矩转换为每根导线所需的张力。值得注意的是,Vlimb系统不仅包含线驱动机构,还融合了皮带驱动机构。研究团队通过创新性地将皮带视为导线的扩展,实现了控制器的统一管理。 最终,系统会将计算出的张力值转换为电机指令电流,并传递至底层的电机驱动器,从而驱动整个Vlimb系统精准、高效地运行。Vlimb性能实验与测试为了全面评估Vlimb的性能表现,研究团队进行了一系列实验测试。在可达范围实验中,Vlimb成功地在各种关节角度下保持了自身重量并实现了姿势控制,验证了其广泛的可达性和机制灵活性。在操纵实验中,Vlimb能够稳定地操纵装有重物的塑料瓶,展示了其在精细操作任务中的潜力。而在提升实验中,Vlimb更是在电源模式下成功举起了相当于成年男性体重的重物,进一步证明了其强大的举升能力。

